通过ADAMS软件提供的图形接口模块,将三维实体造型软件UG中建立的机构三维模型导入到ADAMS软件中的。考虑到所关心的问题和仿真的方便,对操作机构作适当简化后,用ADAMS软件包建模。约束关系的添加要充分考虑实际操作机构中可能存在的约束,遗漏任何一个约束关系都会严重影响到输出结果。3)仿真过程的控制 在ADAMS软件中,为了实现对仿真过程的控制,需要添加传感器来控制仿真过程的自动终止。......
2025-09-29
1.仿真模型的建立
由于二输入的模糊控制相当于比例-微分(proportional differential,PD)调节器,APF作为一种仿射非线性随动系统,直流侧电容电压在调节过程中小范围波动不可避免,为降低控制器微分作用带来的干扰,这里采用一维模糊控制器,控制器以直流侧的实际电压与参考电压之间的偏差e(t)为模糊输入变量,以电网注入APF主电路的有功电流控制量ΔIP为模糊输出变量u。
模糊输入量e(t)定义如下
e(k)=Uref-Udc(k) (3-31)
式中,Udc(k)为第k时刻的直流侧电容电压;Uref为参考电压。
设模糊控制器的输入变量e(t)和输出变量u经过尺度变换后的论域均为
X={-6-5-4-3-2-10123456}
在其论域上取7个语言变量:NB、NM、NS、ZO、PS、PM、PB。输入变量e(t)和输出变量u均选用交叠对称分布的三角形隶属度函数,如图3-25所示。
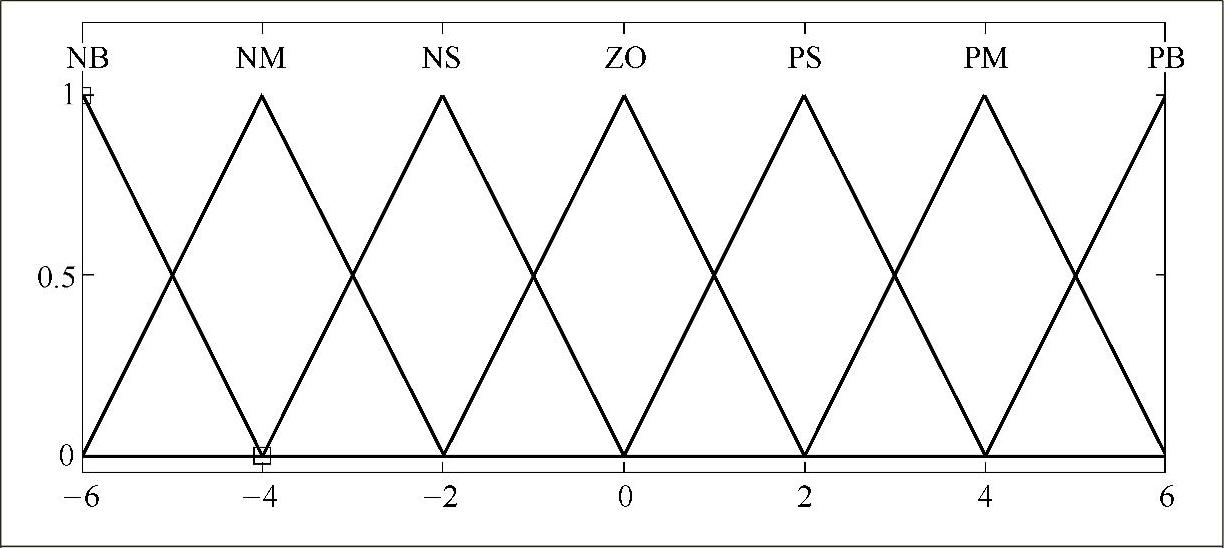
图3-25 三角形隶属度函数
模糊控制规则是模糊控制的核心,因此,如何建立模糊控制规则成为一个十分关键的问题。模糊控制规则是对人类行为和决策分析过程的最自然的描述方式,它建立了模糊输入变量与模糊输出变量之间的联系,多采用IF—THEN形式的模糊条件句。
图3-26所示是APF直流侧电容电压变化过程的参考曲线,可以根据此曲线来制定模糊控制规则。
根据图3-26所示变化过程和已有直流侧电容电压控制经验,可得模糊控制规则如表3-2所示。
表3-2 直流侧电容电压模糊控制规则

这里的模糊推理系统采用Mamdani类型,即采用如下形式的模糊蕴含关系:If e is A then u is C去模糊化方法,采用了面积重心法(centroid)得到模糊控制器的输出值——电网注入APF主电路的有功电流控制量ΔIP。
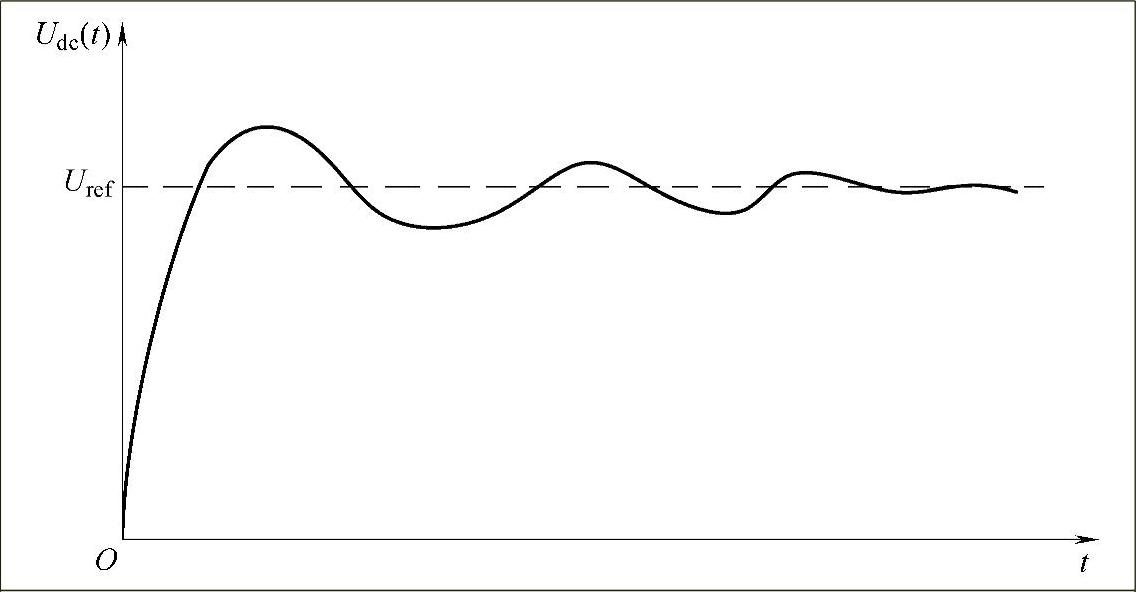
图3-26 APF直流侧电容电压变化过程的参考曲线
这里仿真所用模糊控制器是运用MATLAB自带模糊控制器编辑(FTS)环境设计完成,模糊控制规则表如图3-27所示,模糊控制器输出曲线如图3-28所示。
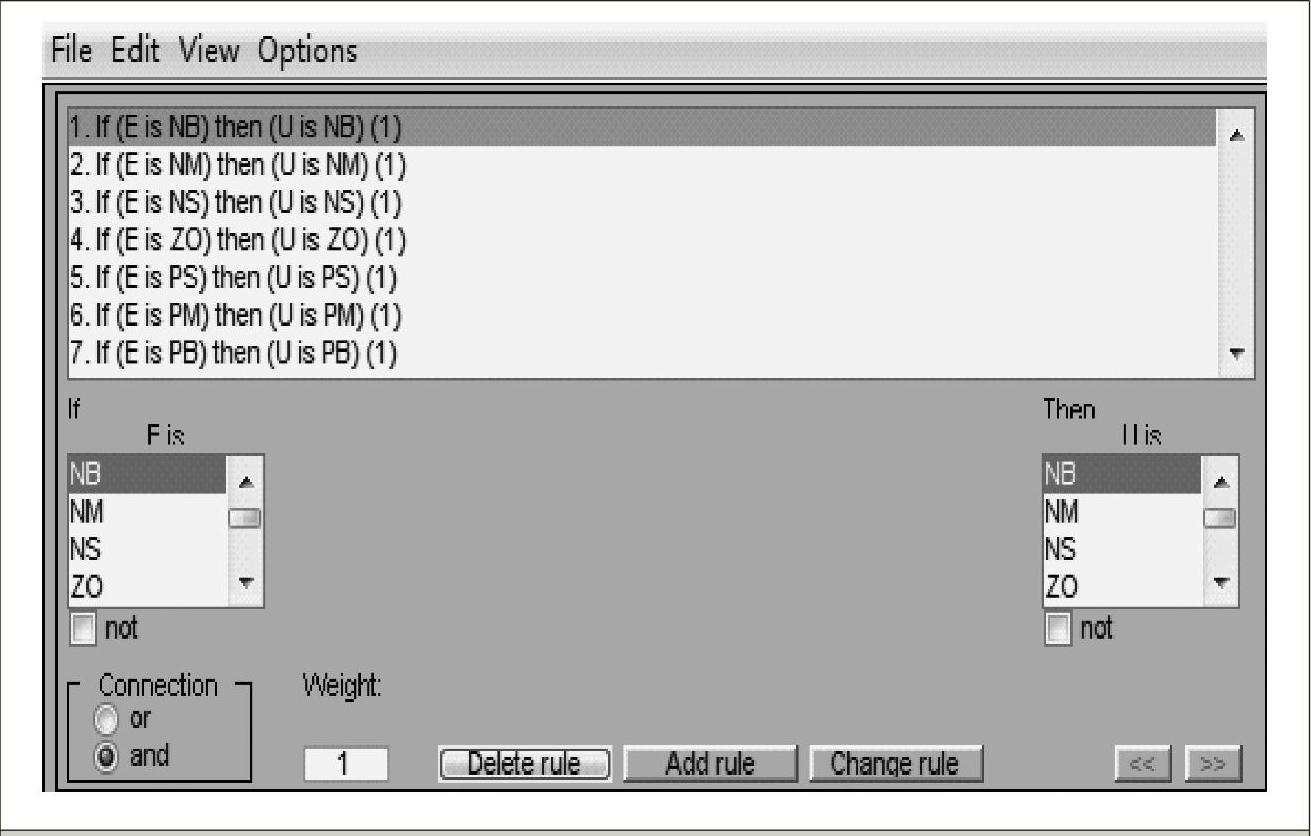
图3-27 模糊控制规则表
根据图3-22、图3-24所示的控制原理图,建立有源电力滤波器在模型参考自适应控制和模糊PI复合控制策略下的整体模型,如图3-29所示,其中包括非线性负载模块(Nonlin-ear Load)、谐波电流检测模块(Harmonic Creator)、滤波主电路(APF Main Circuit)、PWM变换模块(PWM Creator)、模型参考自适应电流跟踪补偿模块(MARC Controller)和直流侧电容电压模糊PI复合控制模块(Fuzzy-PI Controller)等部分。
2.仿真结果与分析
在基于模糊PI复合控制的有源电力滤波器的自适应电流跟踪控制和滞环电流跟踪控制的仿真中,直流侧电容电压的模糊PI复合控制的参数均为kp=0.2,ki=0.01;直流侧电容电压的常规PI控制仿真参数同样为kp=0.2,ki=0.01。
根据表3-3所示参数,由式(3-12)可得D0=0.24;由式(3-11)可得x0=[0.11573600]T;由式(3-10)可得
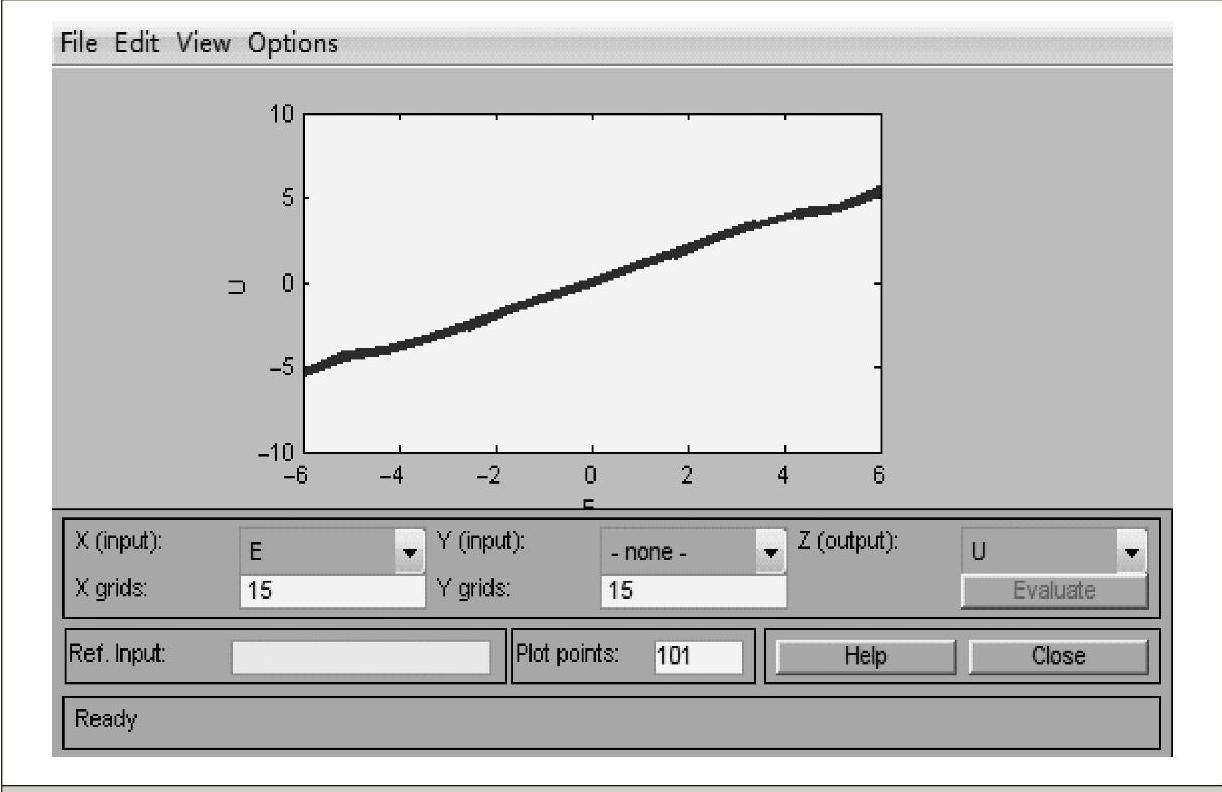
图3-28 模糊控制器输出曲线
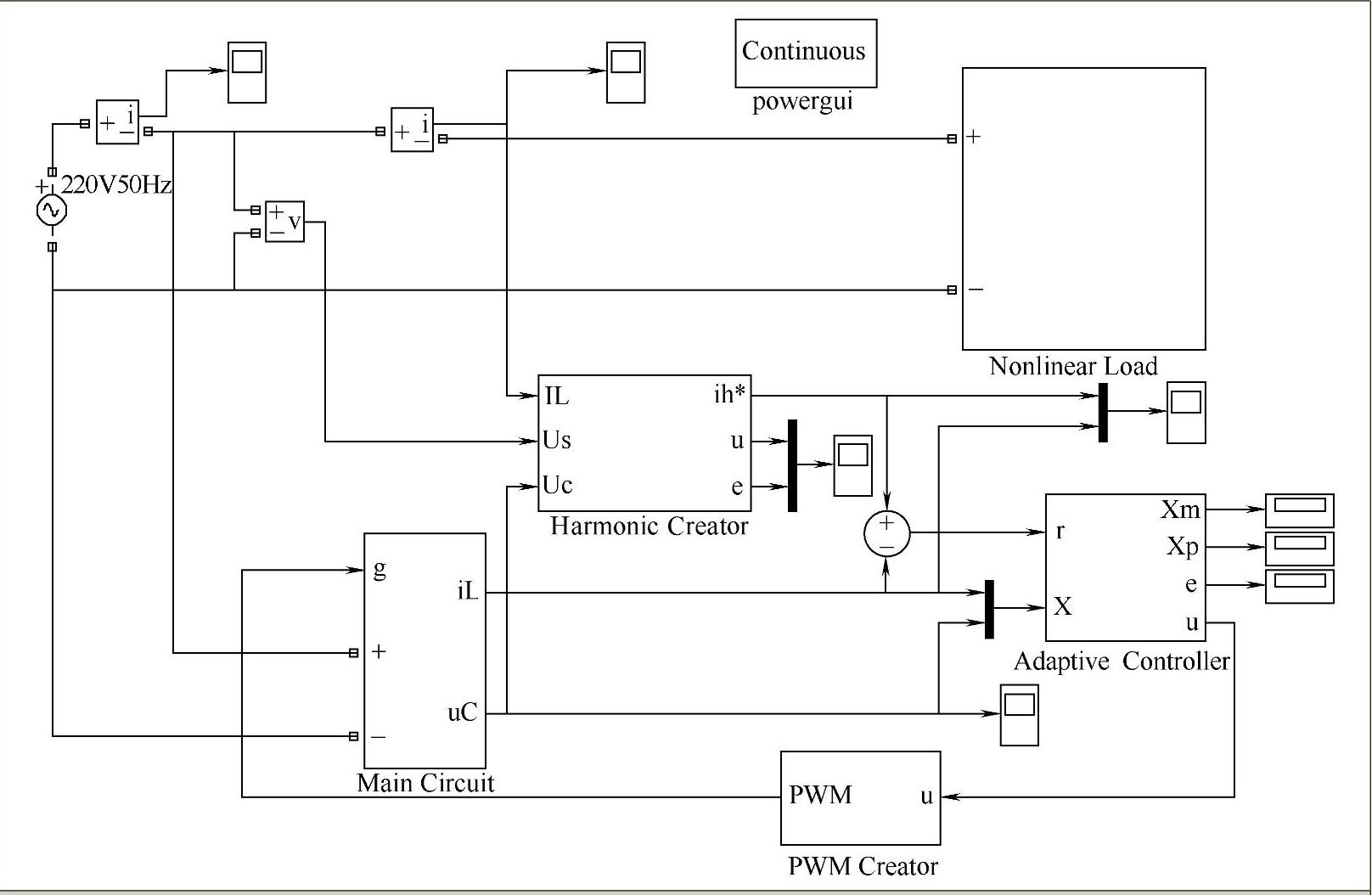
图3-29 有源电力滤波器整体仿真模型
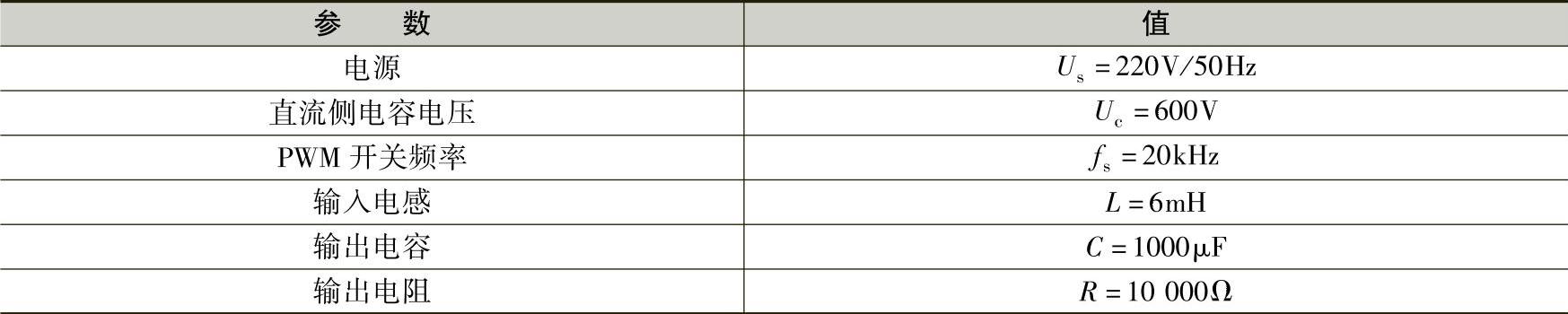
表3-3 仿真参数

取正定矩阵

根据实验取定

具体仿真结果如下:(https://www.chuimin.cn)
1)图3-30所示为无滤波器的情况下电网电流波形。
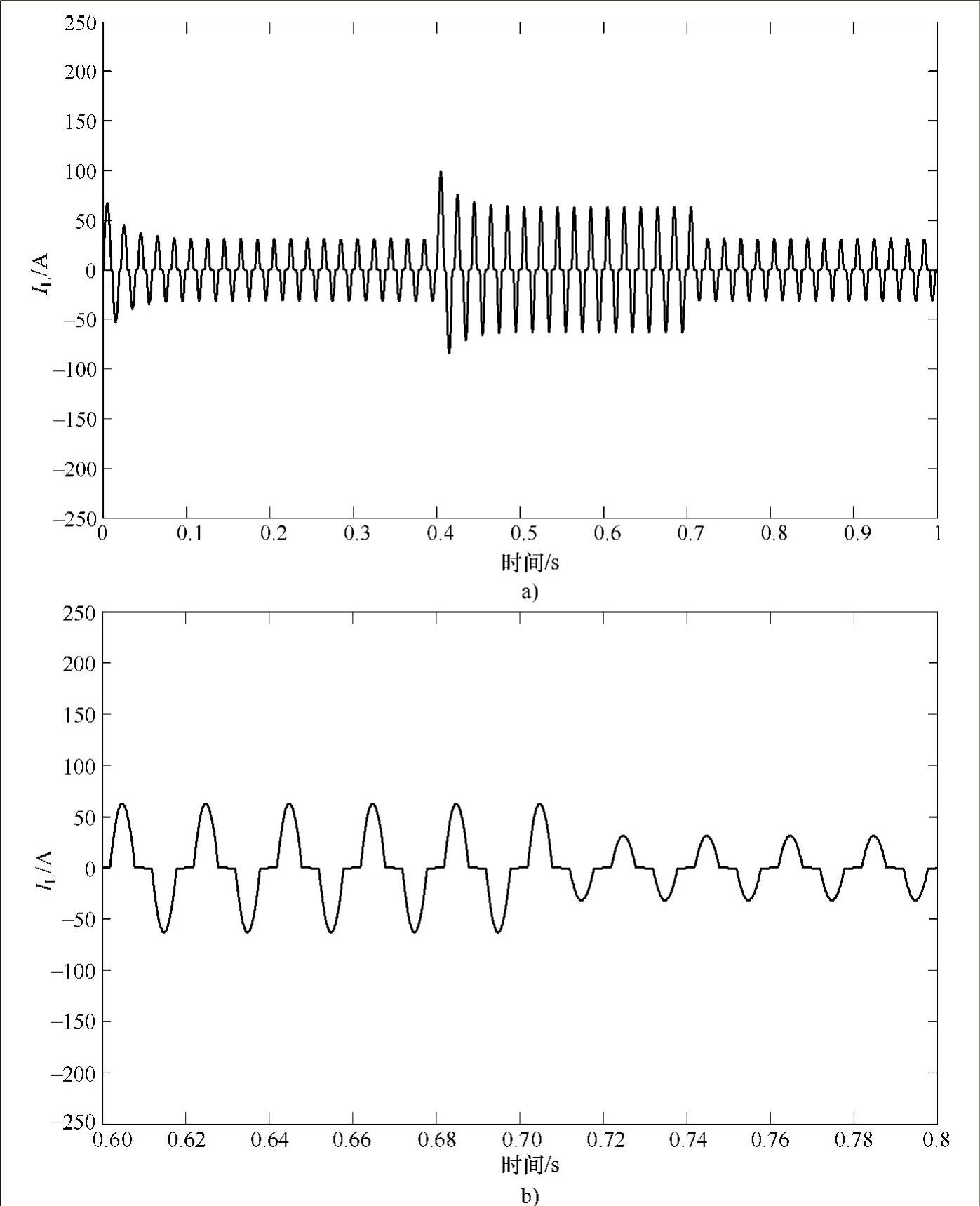
图3-30 无滤波器时电网电流波形
2)图3-31所示为增设基于模糊PI复合控制的有源电力滤波器电流自适应控制后电网电流波形。
图3-31 增设基于模糊PI复合控制的有源电力滤波器电流自适应控制后电网电流波形
3)图3-32显示了模糊PI复合控制的直流侧电容电压的整体变化波形。
4)图3-33是在非线性负载投切时基于常规PI控制和模糊PI复合控制的直流侧电容电压跟踪波形的局部放大效果。
5)图3-34所示为MRAC控制器前馈增益K的输出波形。
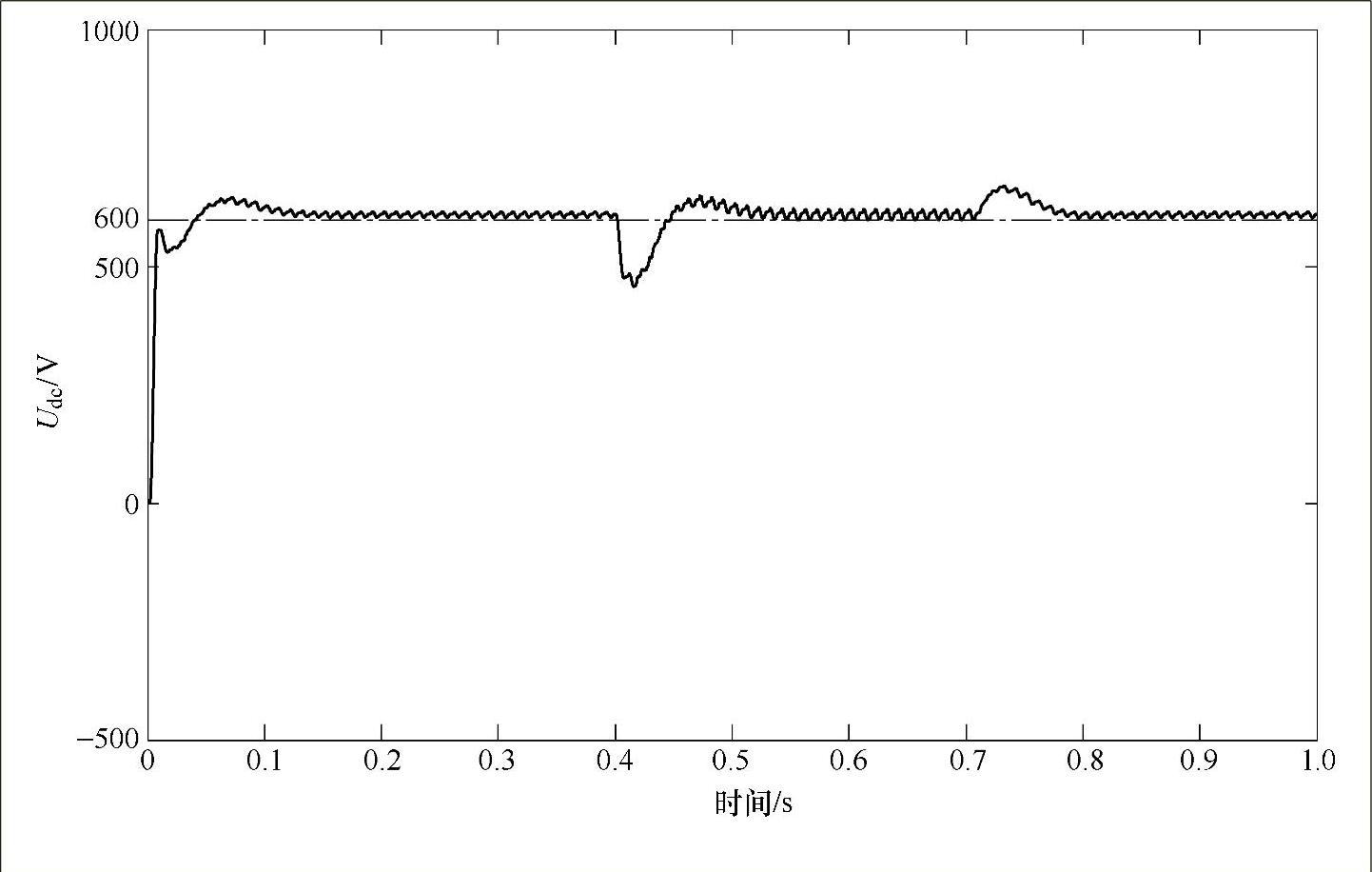
图3-32 直流侧电容电压全局调节跟踪曲线
6)图3-35所示为MRAC控制器反馈增益F的输出波形。
7)图3-36所示为无滤波器时电网电流频谱图。
8)图3-37所示为增设基于模糊PI复合控制的有源电力滤波器电流滞环控制后电网电流频谱图。
9)图3-38所示为增设基于模糊PI复合控制的有源电力滤波器电流自适应控制后电网电流频谱图。
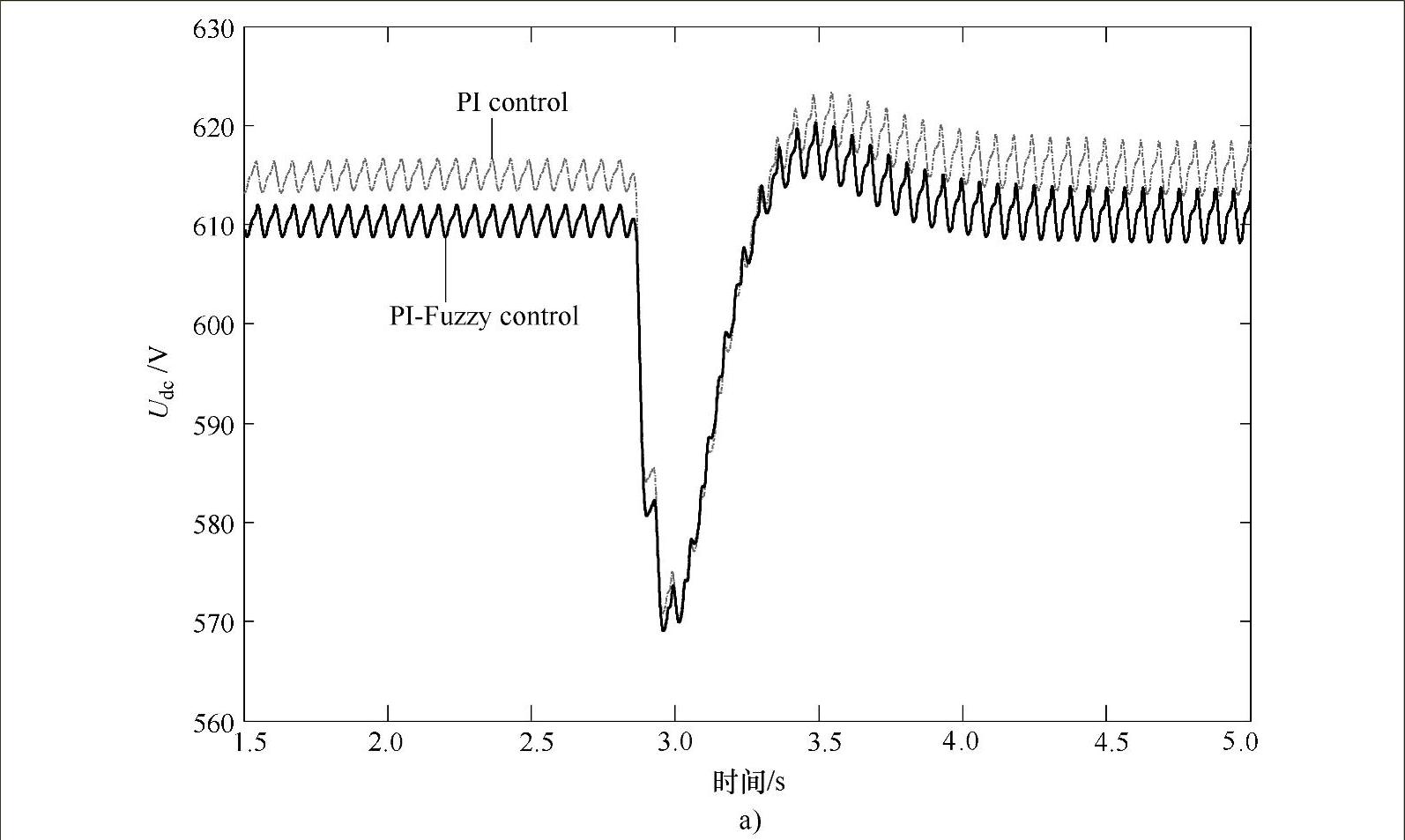
图3-33 非线性负载投切时基于常规PI控制和模糊PI复合控制的直流侧电容电压跟踪波形
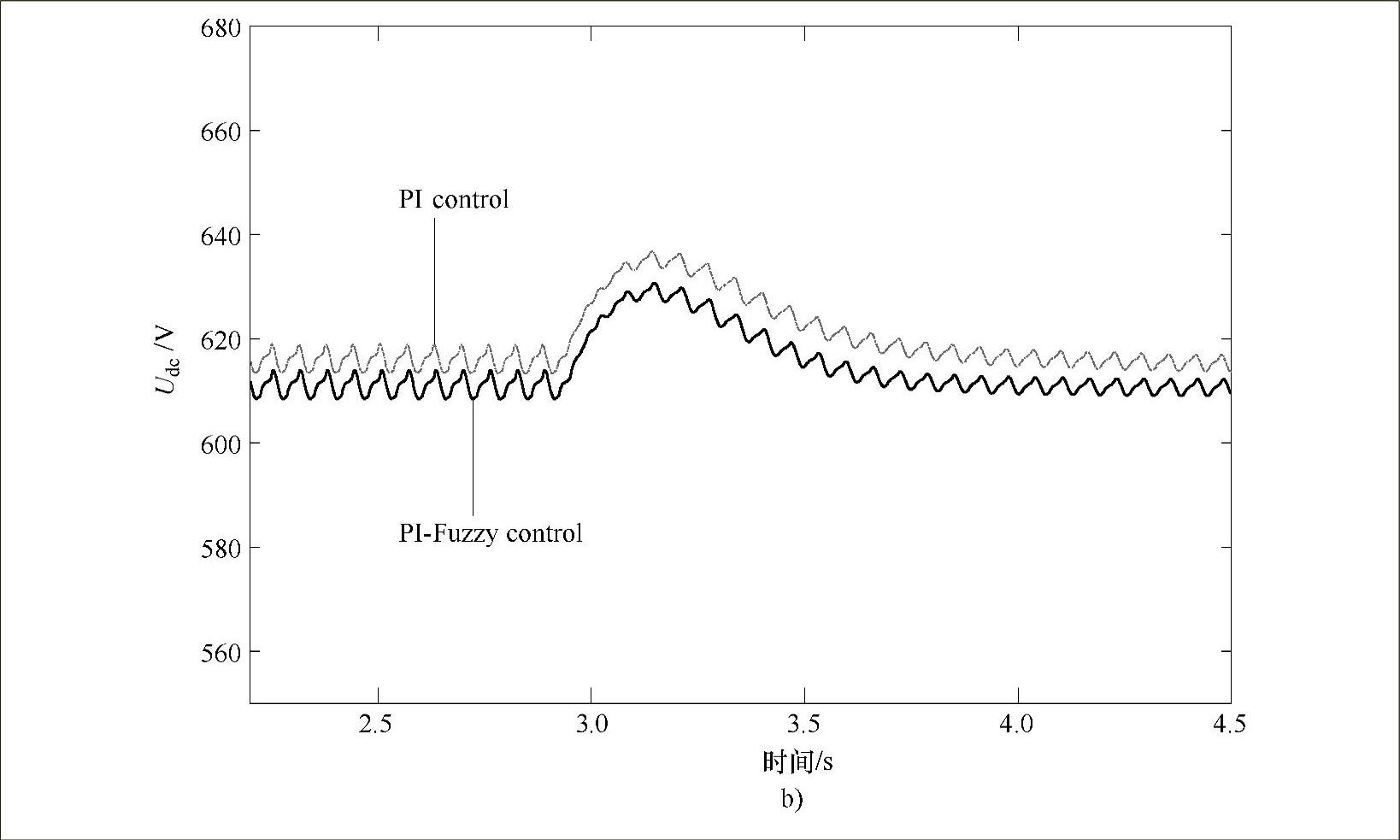
图3-33 非线性负载投切时基于常规PI控制和模糊PI复合控制的直流侧电容电压跟踪波形(续)
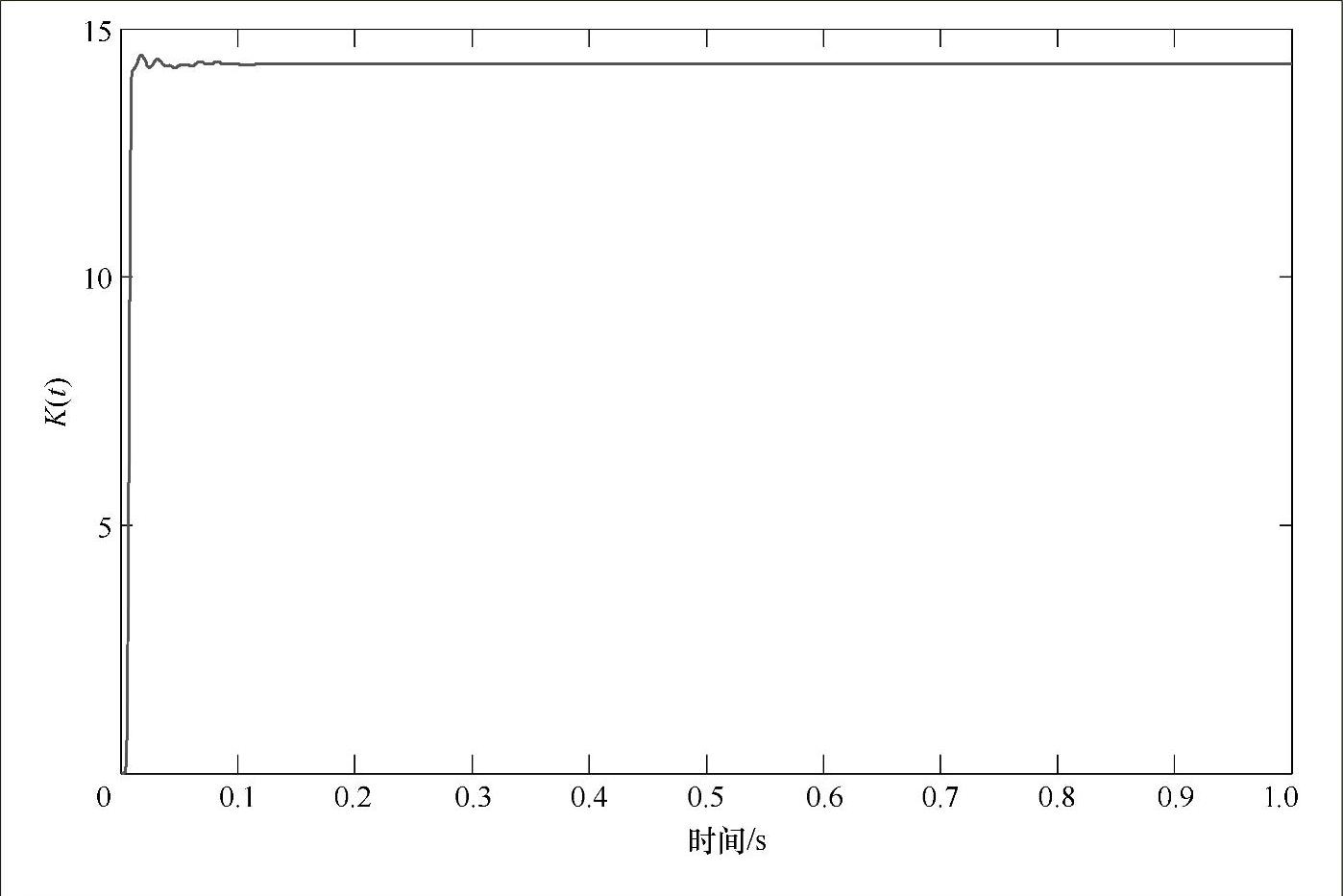
图3-34 MRAC控制器中的前馈增益K值
在仿真过程中,非线性负载变化两次,第一次在APF系统运行至0.4s时,并联一组负载到系统;第二次在APF系统运行至0.72s时,将0.4s时并入系统的负载去除。
从图3-30中可以看出,由于非线性负载影响的缘故,电网电流的波形存在严重失真现象。
从图3-31中可以看出,增加滤波器后,电网电流波形的失真现象得到了明显改善。
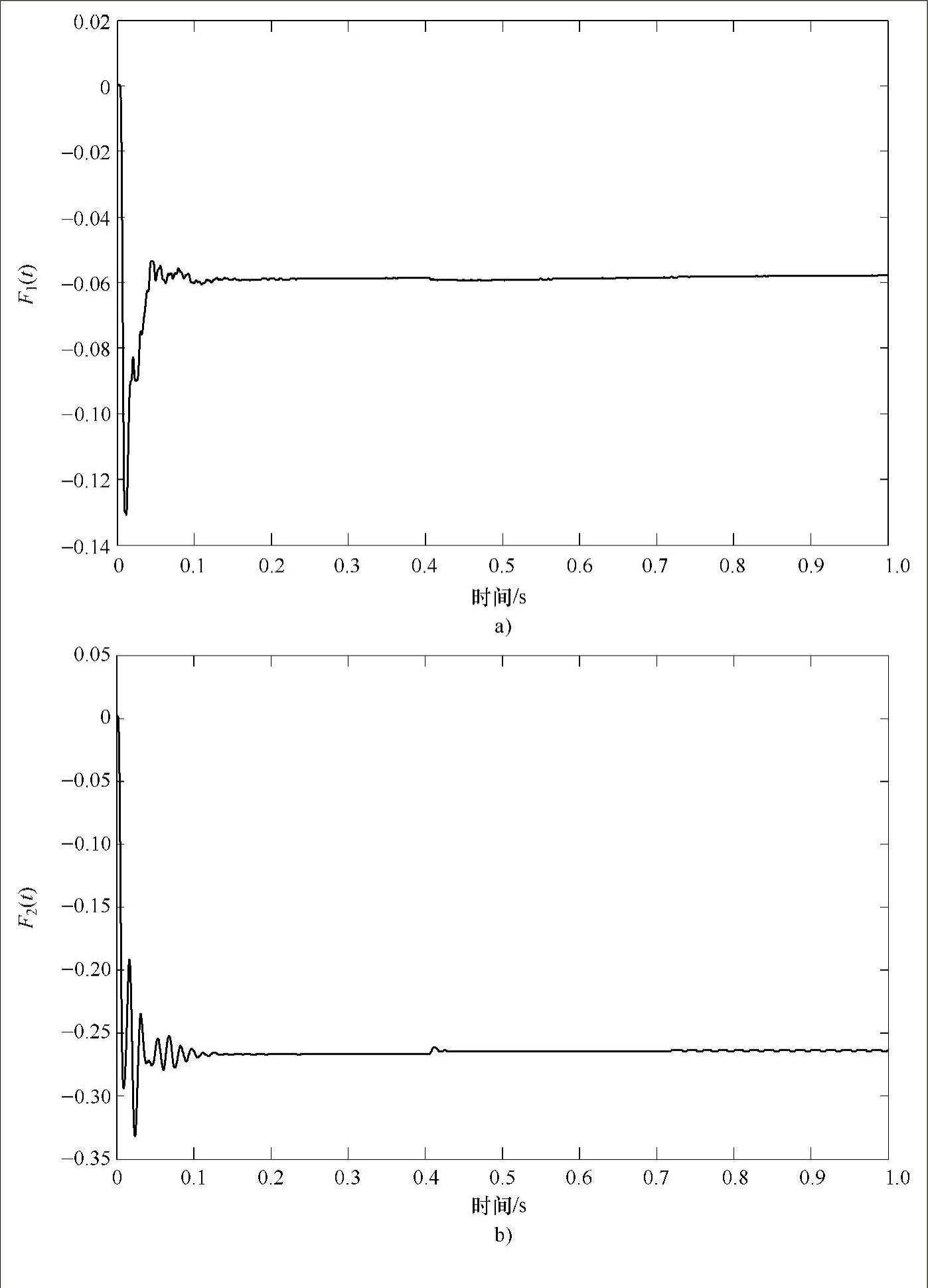
图3-35 MRAC控制器中的反馈增益F值
从图3-32中可以看出,直流侧电容电压的实际值可以很好地跟踪设定的电压值600V。
由图3-33可以看出,模糊PI复合控制的直流侧电容电压较常规PI控制时有超调量小、稳态精度高、鲁棒性好等优点,可以更好地跟踪电压设定值。
由图3-34和图3-35可以看出,前馈增益K和反馈增益F两个参数经过有限时间后趋于稳定,这两个参数与被控系统相互配合共同组成可调系统,使得被控模型跟踪参考模型变化,获得期望的模型特性,并可知MRAC控制作用的有效性。
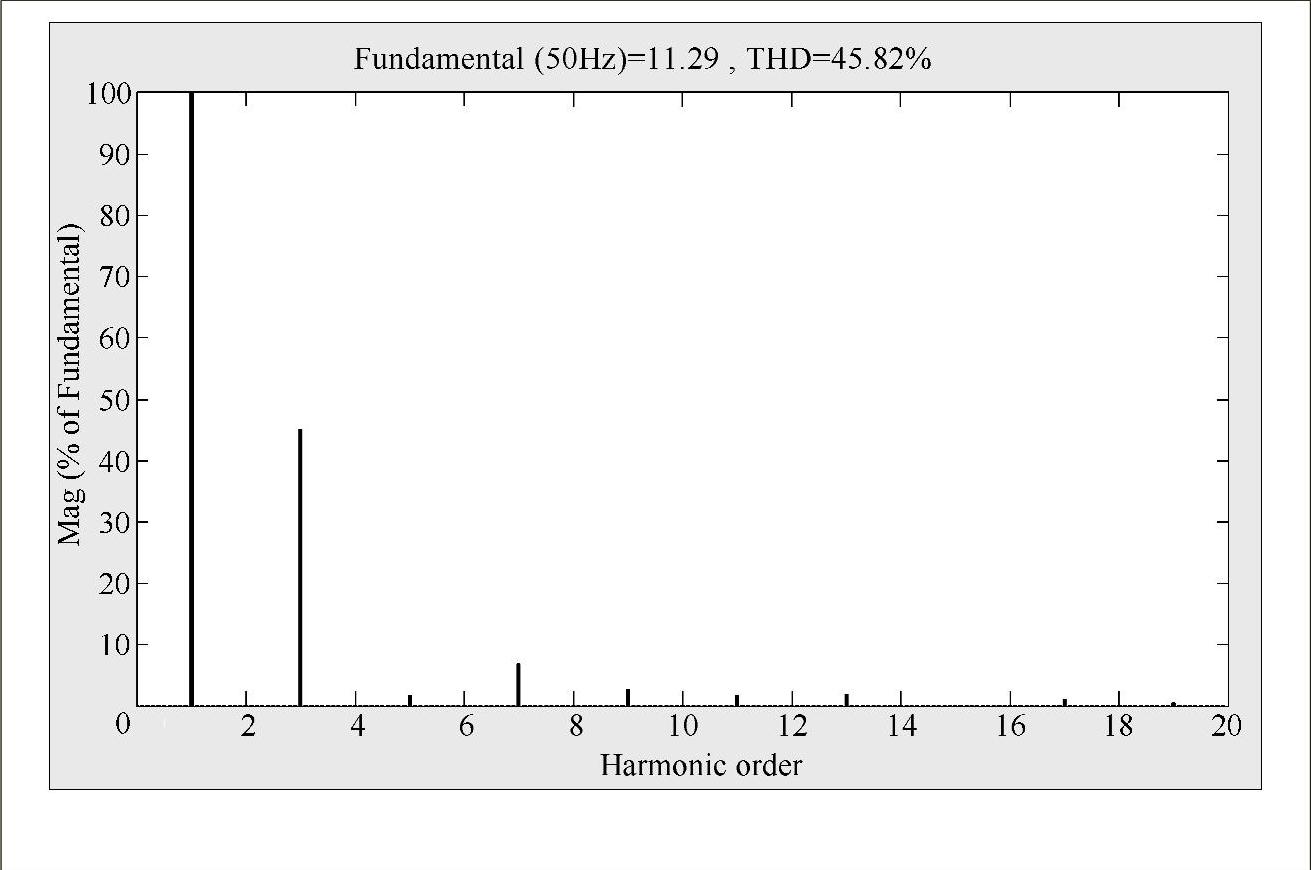
图3-36 无滤波器时电网电流的频谱图
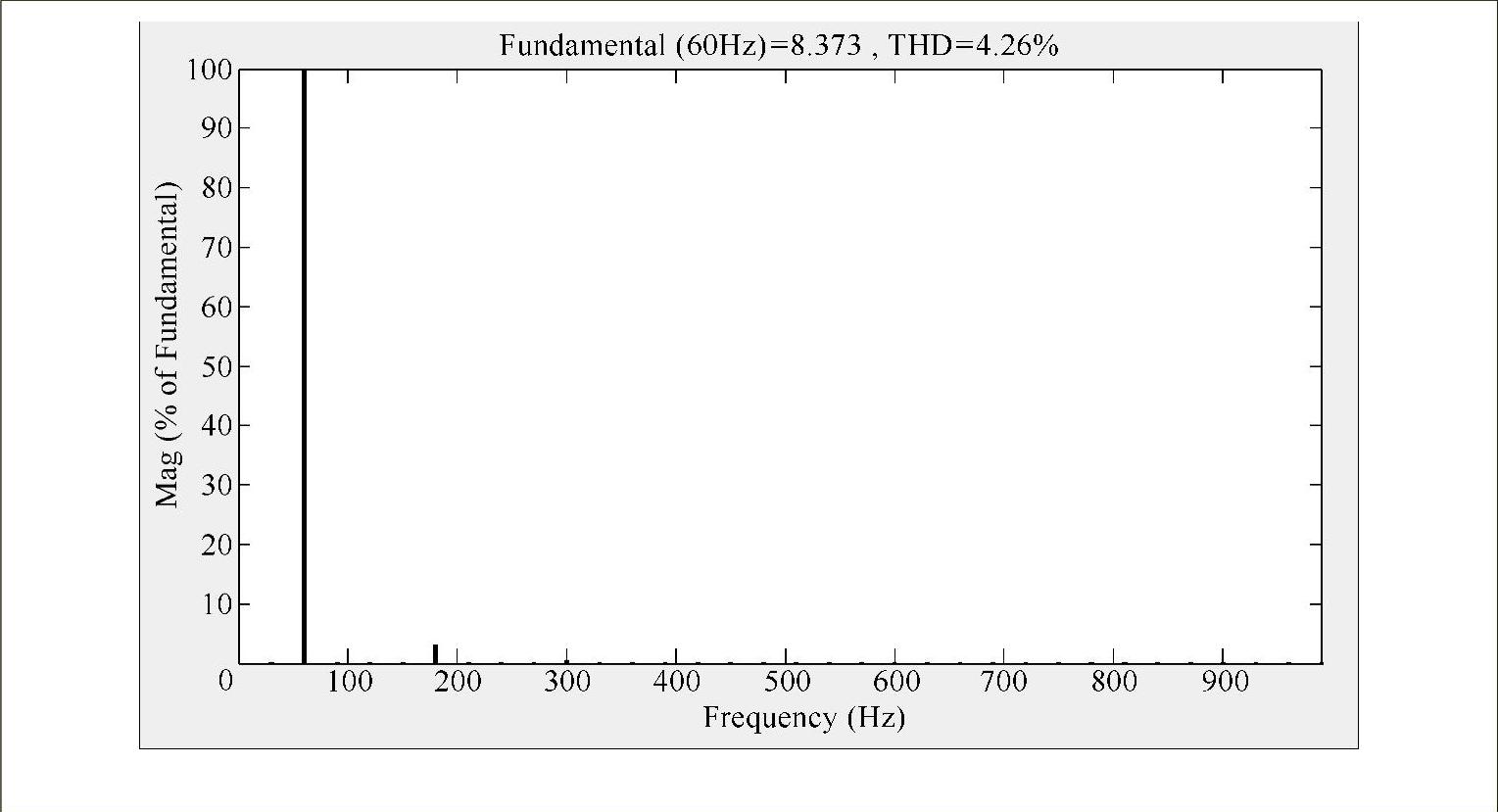
图3-37 增设基于模糊PI复合控制的有源电力滤波器电流滞环控制后电网电流的频谱图
由图3-36可知,非线性负载导致电网电流含大量谐波,此时THD=45.82%;图3-37所示是增设基于模糊PI复合控制的有源电力滤波器电流滞环控制后电网电流的总谐波含量,此时THD=4.26%;图3-38所示是增设基于模糊PI复合控制的有源电力滤波器电流自适应控制后电网电流的总谐波含量,此时THD=3.84%。由此可见,基于模糊PI复合控制的有源电力滤波器电流自适应控制方法对电网谐波的抑制更有效。
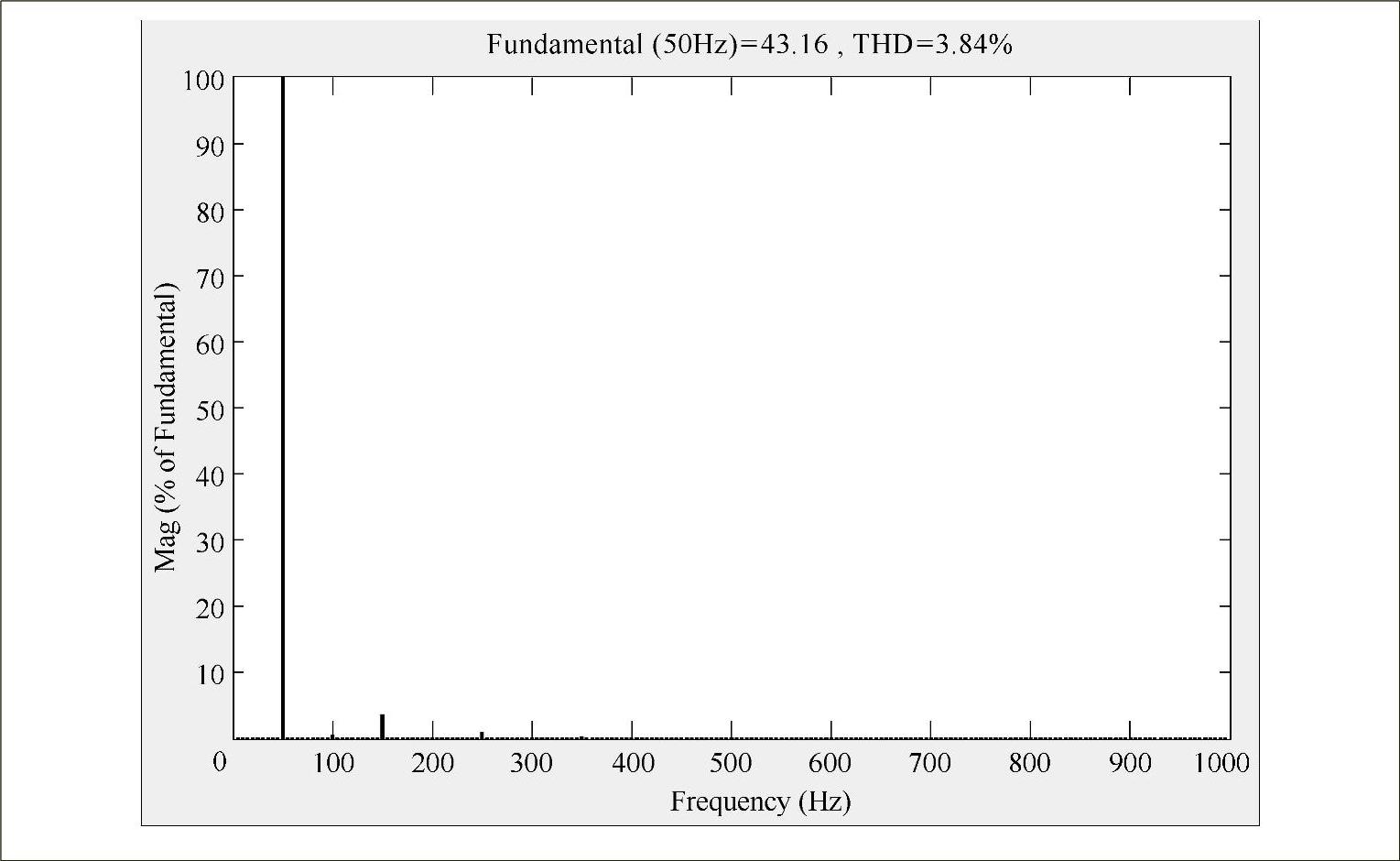
图3-38 增设基于模糊PI复合控制的有源电力滤波器电流自适应控制后电网电流的频谱图
相关文章

通过ADAMS软件提供的图形接口模块,将三维实体造型软件UG中建立的机构三维模型导入到ADAMS软件中的。考虑到所关心的问题和仿真的方便,对操作机构作适当简化后,用ADAMS软件包建模。约束关系的添加要充分考虑实际操作机构中可能存在的约束,遗漏任何一个约束关系都会严重影响到输出结果。3)仿真过程的控制 在ADAMS软件中,为了实现对仿真过程的控制,需要添加传感器来控制仿真过程的自动终止。......
2025-09-29

实验中触头预压力FK保持为25.1N。表6-5为两组实验和仿真的详细结果数据。图6-21为峰值电流为11.3kA时的电流和电动斥力实验波形。表6-5 实验和仿真结果比较在仿真中,表征触头接触情况的参数ξ取值为0.45。而电流峰值为9.0和11.3kA时,对应的触头压力分别为35.4和55.9N。根据式(6-1),可得导电斑点的半径分别为0.158和0.199mm。因此,引入导电桥模型,采用有限元静态分析的方法计算电动斥力是合理的,也是有效的。......
2025-09-29

电磁场中有电路和磁路的概念,热场中也有热路的概念。从这点上讲,把热场简化为热路,其精度比电磁场简化电路和磁路的要低,但通过适当处理也可满足工程计算要求。图5-2 电路与类比的热路a)电路 b)热路表5-1 热路参数与电路参数的类比利用以上热路和电路相似原理可对一具体开关电器建立其热路网络模型,求解热网络问题可采用电网络方法求解,例如用电网络的软件PSpice来计算。另一种求解热网络方法是热网络有限差分法。......
2025-09-29

本书研究的生产仿真系统, 需要仿真数据库与企业的生产制造系统相连接, 可以实时获取生产制造系统中的当前生产线状态数据, 为仿真系统提供仿真的实时初始化数据。录入仿真系统的未来事件数据, 根据仿真模型进行生产仿真预测, 获得的仿真结果可以用于指导制定调度方案。仿真事件数据库子系统。仿真时钟每推进一次, 就产生一次生产线状态数据。图6-7数据库子系统的框架和数据流向......
2025-09-29

1.系统范围界定本书以建筑工程全生命周期过程的清洁生产实施行为为研究对象,通过分析建筑全生命周期中各项因素及其相互关系,系统仿真模拟建筑业清洁生产实施的环境—经济子系统状况,从而预测不同情境下的发展趋势。在建筑清洁生产系统结构模型中设置了建筑全生命周期成本和清洁生产力度为决策点。......
2025-09-29
13.4.2.1库区泥沙运动规律及输沙特性小浪底库区模型试验过程显示,洪水进入水库的壅水段之后,由于沿程水深的不断增加,其流速及含沙量分布从明流状态逐渐变化,水流最大流速由接近水面向库底转移,当水流流速减小到一定值时,浑水开始下潜并且沿库底向前运行。......
2025-09-29

CCD摄像机对FTS的光能量采样公式是未经归一的光强公式,因此原始测量公式为测量时,CCD摄像机同时对I0、Ixn、Iym和xf、yf进行采样,经量化后输入微型计算机进行数据处理,最后显示测量结果ax、Tx、dx和ay、Ty、dy。此外,通用测量还需考虑不同被测对象之间的测量灵敏度、线性度和线性区间的一致性。图 4图 5图 6图6和图7给出了每毫米11线、14线粗光栅和150目金属丝网在无温控环境下的测量结果。......
2025-09-29
计算结果从定性上与相应河段模型试验结果一致,定量上略有差别。小浪底水库调节后,出库沙量大幅度下降,特别是大于0.025m 的中、粗沙大部分被拦截在库区。......
2025-09-29
相关推荐