标准化是确保实现全方位集成的关键途径,结合智能制造的技术架构和产业结构,可以从系统架构、价值链和PLM等三个维度构建智能制造标准化参考模型,帮助我们认识和理解智能制造标准化的对象、边界、各部分的层级关系和内在联系。智能制造标准化参考模型如图1-2所示。图1-2智能制造标准化参考模型1.生命周期生命周期是由设计、生产、物流、销售、服务等一系列相互联系的价值创造活动组成的链式集合。......
2023-06-23
图3-24所示为设计的模型参考自适应控制方案。关于参考模型,由于其动态性能表征了实际系统对动态性能和响应特性的理想要求与期望,在这里,设计其为一个过阻尼二阶系统,选取阻尼比ζ=1.4,上升时间
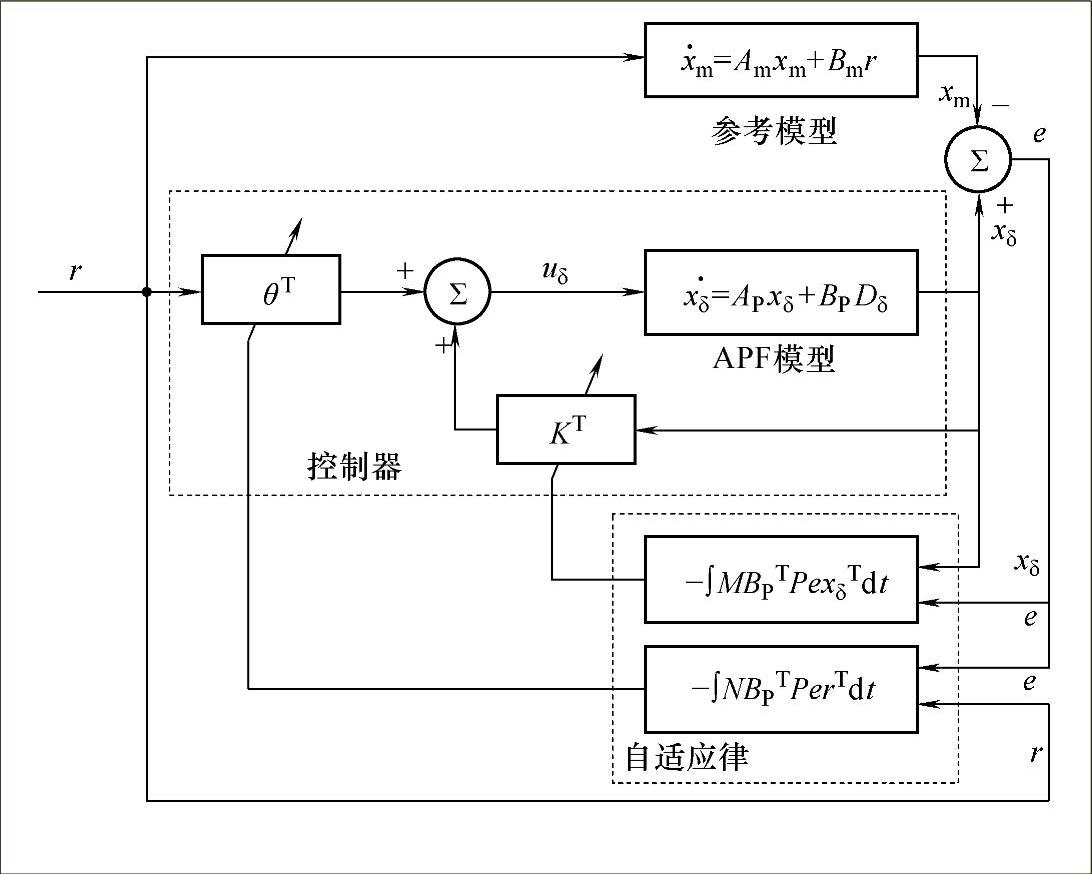
图3-24 模型参考自适应控制方案
可得自然频率wn=30rad/s,调节时间ts≈3.15T1≈0.25s,同时得到参考模型的两个极点-12.6061和-71.3939。那么
在不断实验后确定Bm=[500040]T时,系统效果较好。具体的参考模型状态空间模型为

建立的单相并联型有源滤波器的动态模型为

定义跟踪误差
e=xδ-xm (3-16)
这里的控制目标为找到一个自适应控制律使跟踪误差e趋近于0。为达到控制目标,自适应控制器输出由系统模型定义为
Dδ=KT·xδ+θT·r (3-17)
式中,K(t)=[K1(t),K2(t)]T和θ(t)分别为闭环系统的反馈增益和前馈增益。上式代入单相并联型APF动态模型式(3-15),得

如果反馈增益K(t)和前馈增益θ(t)收敛,最优参数K∗和θ∗将由自适应控制器调整以便被控模型与参考模型相匹配,满足

对跟踪误差求导并将上式代入

式中, 、
、 为参数误差。
为参数误差。
考虑如下的Lyapunov函数

式中,P、M、N为对称正定矩阵;tr为迹(trace)的数学符号。
由于Am是Hurwitz(霍尔维兹)稳定矩阵,存在唯一的2×2正定对称矩阵P满足

式中,Q=QT为2×2正定矩阵。
V(t)沿式(3-20)的迹的导数为

上式右边第2、第3项为标量,由矩阵迹的性质xTAx=tr(xxTA)、tr(A)=tr(AT),上式可写成

因此,令

将式(3-25)代入式(3-23)可得

上式说明 始终是负值,即在任何初始条件下e是有界的。因为
始终是负值,即在任何初始条件下e是有界的。因为 ,所以V(t)是单调非递增并且有界的。
,所以V(t)是单调非递增并且有界的。

即有

根据Barbalat定理,当t→∞时e→0,因此,可以推导出系统是渐进稳定的。
则由 、
、 ,得到如下的参数自适应律:
,得到如下的参数自适应律:

自适应控制输出为
Dδ(t)=KT(t)Xδ(t)+θT(t)r(t) (3-30)
有关电力电子技术在电力系统中的应用的文章

标准化是确保实现全方位集成的关键途径,结合智能制造的技术架构和产业结构,可以从系统架构、价值链和PLM等三个维度构建智能制造标准化参考模型,帮助我们认识和理解智能制造标准化的对象、边界、各部分的层级关系和内在联系。智能制造标准化参考模型如图1-2所示。图1-2智能制造标准化参考模型1.生命周期生命周期是由设计、生产、物流、销售、服务等一系列相互联系的价值创造活动组成的链式集合。......
2023-06-23

为了保证滑膜运动的发生,给出如下自适应控制策略下面证明自适应控制策略可保证滑膜运动的发生,控制系统(6-1)和系统(6-2)达到同步。定理6-1 在自适应控制策略的控制下,异结构的驱动系统(6-1)和响应系统(6-2)的同步误差向量收敛到滑膜面S=0。......
2023-11-22
同时,冲击波传入靶体,在径向产生压应力和应变,在切向产生拉应力与应变。由于混凝土靶体材料的抗拉强度远低于抗压强度,因此靶体首先在拉应力作用下发生断裂,形成径向裂纹。气体产物沿裂纹区扩散,导致裂纹进一步扩展,造成本体功能型硬目标结构爆裂毁伤。图6.33混凝土靶爆裂毁伤计算模型混凝土靶体中最终裂纹长度取决于高压气体产物膨胀,而爆燃压力直接取决于进入侵孔内活性材料的质量。......
2023-06-18

应急大数据种类多,关系复杂。该混合时空数据模型将应急时空大数据抽象为数据集{时间,空间,事件},如图2.10所示。其中时间轴T为UTC时间,空间轴X为与突发事件相关的空间基础数据,存储形式为CGCS2000坐标系下的大地坐标,事件轴E是突发事件的相关数据,主要包括致灾因子、承灾体、孕灾环境、抗灾体等数据。将X及E投影到时间轴,可视为在某一时间节点上的快照片段数据,表达为该时刻发生事件涉及的空间区域以及应急数据。......
2023-06-15

发动机的电子控制项目有燃料喷射控制、点火时间控制、怠速转速控制、废气再循环控制、进气通路控制、气门正时控制等许多项目。目前,电控汽油机几乎都采用单独喷射方式。燃料切断控制是向喷油器输出喷射停止信号,以切断燃料供给的状态。这是以防止催化转化器过热和提高燃油消耗率为目的,减速时执行的燃料切断控制,以及以防止发动机超速损坏为目的,高速时执行的燃料切断控制。④稀薄空燃比控制。......
2023-06-28

弹道导弹具有较强的修正能力, 弹道导弹的射击方向与发射装置和目标点之间的连线方向重合即可, 导弹飞行中控制系统将其严格控制在发射平面内直至命中目标。基于以上5 方面的原因, 无法将弹道摄动理论直接挪用到弹道修正火箭弹上。......
2023-06-15

所以,对于切削加工过程中温度和应力的耦合问题,需要按热-力耦合的方法求解。工件还受到外部节点力载荷和分布载荷及体力载荷作用,总的等效节点力为式中,Δ{R}ed、Δ{R}ep、Δ{R}eF分别是外部节点力载荷、分布载荷和体力载荷的等效节点力。......
2023-06-27
因而有文献指出,可进行人工干预,根据不同的季节来改变CVT控制的基准,从而实现MPPT控制。所以说,CVT控制无法实现真正意义上的MPPT控制,具有较大的弊端和局限性。下面结合图5-20和图5-21来描述扰动观测法的MPPT过程。......
2023-06-23
相关推荐