肌肉组织是指骨骼肌而言,俗称之“瘦肉”或“精肉”。肌肉的收缩和伸长就是由肌原纤维的收缩和伸长所致。肌原纤维具有和肌纤维相同的横纹,横纹的结构按一定周期重复,周期的一个单位叫肌节。比如,牛肉结缔组织的吸收率为 25%,而肌肉的吸收率为 69%。......
2025-09-29
正如前面分析所知:Clarke正变换和反变换具有功率不变的特性。因此,Clarke变换非常适合用于分析三相系统中的瞬时功率。传统功率的定义有个前提条件,即系统必须处于稳态。而三相瞬时有功功率具有清晰且被普遍接受的物理意义,同时在暂态过程中也是适用的。
三相瞬时有功功率P3ph(t)可以通过相电压和线电流的瞬时值来计算,即
P3ph(t)=ua(t)ia(t)+ub(t)ib(t)+uc(t)ic(t) (2-103)
也就是
P3ph=uaia+ubib+ucic (2-104)
式中,ua、ub和uc为相电压瞬时值;ia、ib和ic为线电流瞬时值。
在没有中性线的系统中,ua、ub和uc是以一个公共的参考点来测量的,有时这个参考点可以为“大地”,也可以为任意选择的公共参考点。例如,若将c相作为公共参考点,则测量到的“相电压”和三相瞬时有功功率P3ph(t)就变为
P3ph=(ua-uc)ia+(ub-uc)ib+(uc-uc)ic=uacia+ubcib (2-105)
由式(2-105)就不难明白为什么在n线系统中可以利用(n-1)个瓦特表来测量有功功率。图2-12给出了用两个瓦特表测量三相三线制三相负载平均功率的测量接线图。(https://www.chuimin.cn)
如果利用坐标变换将abc坐标系中的量替换为αβ静止坐标系中的分量,则三相瞬时有功功率就可以用αβ分量来计算,即
P3ph=uaia+ubib+ucic=uαiα+uβiβ+u0i0 (2-106)
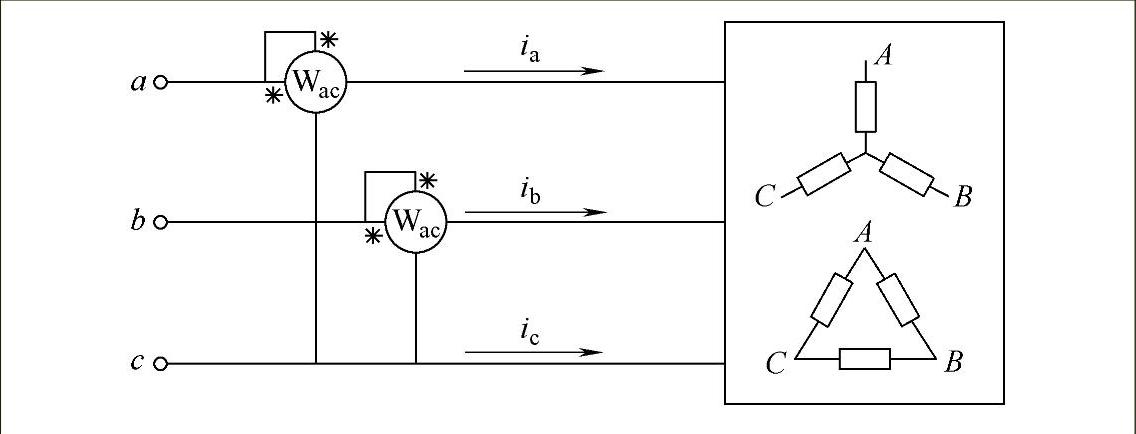
图2-12 二表法测量三相三线制三相负载平均功率的测量接线图
Clarke变换的功率不变特性在式(2-106)中得到了证明,p-q理论也利用了这个特性。
p-q理论是在三相系统中定义的,这里所指的三相系统可以有中性线也可以无中性线。此时,瞬时功率分为如下三个分量:瞬时零序功率p0、瞬时实功率p和瞬时虚功率q。上述瞬时功率的定义是基于αβ坐标系下的瞬时相电压和瞬时线电流来定义的,即

在三相三线制系统中,无零序电流,i0=0。此时,只存在α、β轴上的瞬时功率。由于u0i0总等于零,因而在三相三线制系统中,代表单位时间内总能量流的实功率p可以由α、β分量来表示,即P3ph=p。而瞬时虚功率q,由于其物理意义并非传统上的概念,则将在后面进行详细解释。
相关文章

肌肉组织是指骨骼肌而言,俗称之“瘦肉”或“精肉”。肌肉的收缩和伸长就是由肌原纤维的收缩和伸长所致。肌原纤维具有和肌纤维相同的横纹,横纹的结构按一定周期重复,周期的一个单位叫肌节。比如,牛肉结缔组织的吸收率为 25%,而肌肉的吸收率为 69%。......
2025-09-29

功率MEMS是能够发电或进行电能转换的微机电系统。涡轮机的转子直径为8mm,每分钟旋转三百多万转,能够产生几十瓦的机械功率,而释放的尾气温度超过1500℃。如果与一个牙钻相连,这个发电机在400000r/min时可以产生5W的功率,在1000000r/min时则能产生20W的功率。......
2025-09-29

所谓运算负荷功率,实质上是变电所高压母线上从系统吸取的等值功率。如图3-5所示,变压器二次母线负荷功率为加上变压器损耗得到进入变压器的功率再减掉变电所母线所连线路末端电纳中功率Qc,得到的即为该变电所的运算负荷功率。应该说明的是,在计算运算负荷功率和运算电源功率时变压器损耗和线路电纳功率都是按额定电压计算的。......
2025-09-29

1.用q轴电势Eq、E′q、UGq表示的功率特性由凸极发电机供电的简单电力系统的相量图如图13-19所示。应用相量图可求出用电势和功角表示的Id,即将式中的Iq及式中的Id代入式中,经整理后可得图13-19凸极发电机供电的简单电力系统相量图这些算式与一样,都包含磁阻功率项,而且当电势、电压均为常数时,功率与功角δ成非正弦的关系。应用上述公式计算功率特性时,须要根据给定的运行条件去确定E′q0、UGq0的值。......
2025-09-29

S7-1200 PLC提供了运行中修改速度和位置的功能,可以使运动系统在停止的情况下,实时改变目标速度与位置。可以看出,S7-1200运动控制功能的实现包含以下4部分:图9-27 运动控制功能原理示意图①相关执行设备。执行设备主要包括伺服驱动器和伺服电动机,CPU通过硬件输出,给出脉冲与方向信号,用于控制执行设备的运转。在“脉冲选项”中,脉冲发生器有两种类型:PTO与PWM,使用运动控制功能时需要选择PTO方式。......
2025-09-29
合理的配置无功功率补偿容量,以改变电力网的潮流分布,可以减少网络中的有功功率损耗和电压损耗,从而改善用户处的电压质量。图5-23简单电力网的无功功率补偿图5-23所示为一简单电力网,供电点电压U1和负荷功率P+jQ已给定,线路电容和变压器的励磁功率略去不计。试确定采用下列无功功率补偿设备时的设备容量:补偿设备采用电容器;补偿设备采用调相机。最小负荷时适当减少吸取的感性无功功率就可使低压母线电压达到10.5kV。......
2025-09-29

系统中变压器的无功功率损耗占相当大的比例,较有功功率损耗大得多。但如利用自然功率的概念,可作一个大致估计:当通过线路输送的有功功率大于自然功率时,线路将消耗感性无功功率;当通过线路输送的有功功率小于自然功率时,线路将消耗容性无功功率。......
2025-09-29

总的来说,杆式射流成形应遵循以下3方面原则。图1.25药型罩压垮过程2)较小头、尾速度差根据射流形成理论,射流和杵体速度vj、vs分别表述为式中,α和δ分别为药型罩半锥角和偏转角。......
2025-09-29
相关推荐