激光跟踪仪三维控制网的建立过程一般是,激光跟踪仪首先设站测量全局控制点,移动跟踪仪到新的站位,再次测量全局控制点,逐次转站直至完成整体测量任务。利用激光跟踪仪每个测量站位下对全局控制点的共同观测,通过相应的配准算法,可以完成激光跟踪仪所有站位的方位定向。从而得到最优旋转矩阵R,再根据式计算出相应的平移矩阵T,进而得到激光跟踪仪所有站位间的定向关系。......
2023-06-23
激光跟踪仪是一种可移动的大尺寸坐标测量装置,利用高精度水平、垂直两个角度编码器及干涉测距同时获得水平角α、垂直角β、斜距r,建立以测站坐标原点为中心的球坐标测量系统,如图1所示。
激光跟踪仪内部由激光干涉测量系统、水平和垂直角度编码器、伺服电动机以及光电接收器等组成。激光器发出的光束通过一个可沿水平轴和垂直轴旋转的转镜照射到目标反射镜上,由反射镜反射回来的光被分光镜分为两路:一路进入激光干涉系统测得反射镜的移动距离;一路由四象限光电元件接收产生光束偏离反射镜中心的差动信号,通过伺服控制电动机带动转镜传动,实现光束对目标反射镜中心的跟踪。同时,两个角度编码器分别获取转镜的水平和垂直角,通过球坐标测量系统来获取被测点的空间三维坐标。
激光跟踪仪所建立的三维坐标控制网精度主要由激光跟踪仪的坐标测量误差所决定,可由空间中两个全局控制点之间的距离测量结果反映出来,见表1。选取空间中两组控制点之间的观测距离作为评价的对象,其在激光跟踪仪多站位观测下理论上应该是一个固定值,然而在距离值接近4m时,距离观测值标准达到了0.057mm,在接近18m时,标准差更是达到了0.095mm,这是激光跟踪仪自身坐标测量精度所带来的误差。
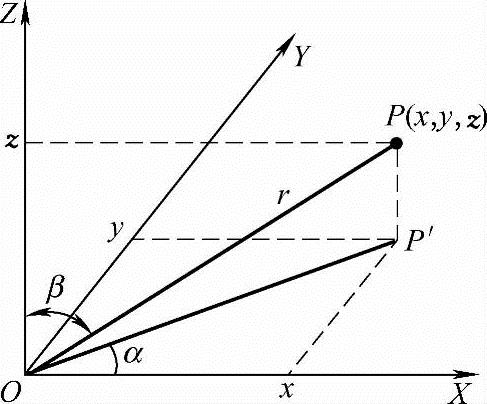
图1 激光跟踪仪球坐标测量系统
表1 激光跟踪仪长度测量结果 (单位:mm)

根据Leica激光跟踪仪AT901-LR的技术参数,它的干涉测长精度为±0.5μm/m,角度测量精度为(±15μm+6μm)/m。从自身参数可以看出,激光跟踪仪的测距精度远高于测角精度,而且随着测量距离的增大,测角误差增大更为明显,符合表1中的观测结果。如图2所示,在Matlab中利用激光跟踪仪自身参数把随机误差注入到观测值中,以模拟点云的形式得到三维坐标的点云分布图。从图2中也可看出跟踪仪的测角误差远高于测距误差,如果测角误差能加以改善,激光跟踪仪所建立的三维坐标控制网精度将会有进一步提高。
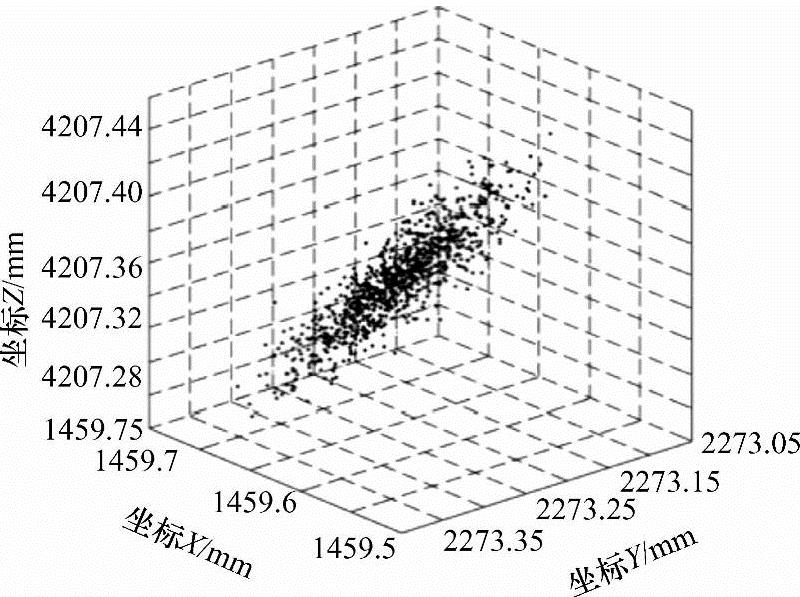
图2 激光跟踪仪测量点云分布图
有关激光及光电测试技术叶声华科研团队论文集的文章

激光跟踪仪三维控制网的建立过程一般是,激光跟踪仪首先设站测量全局控制点,移动跟踪仪到新的站位,再次测量全局控制点,逐次转站直至完成整体测量任务。利用激光跟踪仪每个测量站位下对全局控制点的共同观测,通过相应的配准算法,可以完成激光跟踪仪所有站位的方位定向。从而得到最优旋转矩阵R,再根据式计算出相应的平移矩阵T,进而得到激光跟踪仪所有站位间的定向关系。......
2023-06-23

目前的激光粒度仪多以500~700 nm波长的激光作为光源。激光粒度分析仪是应用颗粒对光的散射或衍射现象设计制造来测定颗粒大小的仪器,可分为激光衍射法和动态光散射法。但由于激光粒度仪具有样品用量少、自动化程度高、快速、重复性好及非接触式测量,已经得到了广泛的应用。散射光的信号经接收器接收后以数字形式进入相关器单元,而计算单元用于控制测量、储存处理信号和计算结果。图3-61DLS仪器的结构......
2023-06-20

如图1-25所示的是J2-JD型激光经纬仪。使用激光经纬仪时,首先按经纬仪基本操作安置、整平仪器,并照准目标。图1-26 激光经纬仪光路原理图1—物镜组 2—调焦镜组 3—分光棱镜组 4—十字丝分划板 5—目镜组 6—聚光镜组 7—反射棱镜 8—氦氖气体激光器 9—转换开关 10—波带片 11—针孔光栏激光经纬仪在施工测量、构件装配的划线放样和大型机械设备安装、船体放样等方面应用广泛。激光经纬仪配有专用激光电源,可接一般220V交流电源。......
2023-08-27
高的切割速度1200W的CO2激光切割2mm厚低碳钢板的切割速度达到0.1m/s,切割5mm厚有机玻璃的切割速度0.2mm/s;激光切割钢板生产率达到冲模下料的30%左右。试验设备和材料 其试验设备采用波长为10.6μm、功率为4kW的快速轴流CO2激光器,光束聚焦使用125mm的透镜。......
2023-06-26
也就是说椭偏分析强烈地依赖于拟合模型的选取。Ψmod、Δmod和Ψexp、Δexp分别是椭偏参数的拟合值和实测值。对薄膜的椭偏光谱进行拟合时,需要根据不同的材料特性,赋予每层薄膜合适的色散关系。建立合适的结构模型和色散关系对于光学常数的准确测量十分关键。......
2023-06-20

脉冲激光切割的主要工艺参数是激光平均输出功率、脉冲峰值功率、脉冲频率和脉冲持续时间、切割速度、焦点位置和辅助气体。脉冲频率 脉冲频率影响切割面的表面粗糙度和热影响区宽度。......
2023-06-26

测量仪器仪表的测得值与被测量真值之间的差异,称为测量误差。为了表征测量的准确程度,常用相对误差的形式。例如5.0级表示满度相对误差的最大值不超过仪表量程上限的5%。解:0.5级温度计测量时可能出现的最大绝对误差、测量80 °C可能出现的最大实际相对误差分别为该温度计的满度相对误差介于1.0%与1.5%之间,因此该表的精度等级应等为1.5级。......
2023-06-22

属于人为错误,由于测量人员观察错误或记录疏忽造成的大误差。对同一量进行多项目精度观测,所产生的最大偶然误差叫极限误差。根据概率统计,偶然误差大于中误差的机会约占32%,大于两倍中误差的机会约占5%,大于三倍中误差的机会约占3%,所以一般取三倍中误差值作为偶然误差的极限值。误差的绝对值与观察量之比称为相对误差。例如,测量100m,误差1cm,则相对误差为。丈量距离时,一般允许误差如下:良好地区为中等地区为不良地区为......
2023-06-29
相关推荐