在带有旋转刀具的数控机床中,更换主轴头换刀是一种比较简单的换刀方式。通常由转塔的转位更换主轴头,实现自动换刀。当数控系统发出换刀指令时,各主轴头依次地转到加工位置,并接通主运动,使相应的主轴带动刀具旋转;其他处于不加工位置上的主轴均与主运动脱开。最后通过液压拨叉移动齿轮3,使其与新更换完主轴的齿轮12相啮合。为保证主轴的刚性,需限制主轴数目。......
2023-06-23
人体本身一定程度上决定了人类对世界的认知方式,事实上,人观察事物是有一定固定视角的。如果拍摄角度与人的视角吻合,那么拍出来的照片真实感会比较强。如果拍摄角度对常见视角有所突破,时常会获得出其不意的效果。但是倘若拍摄角度既不符合真实视角,又没有什么新意,那么照片就会显得怪异。
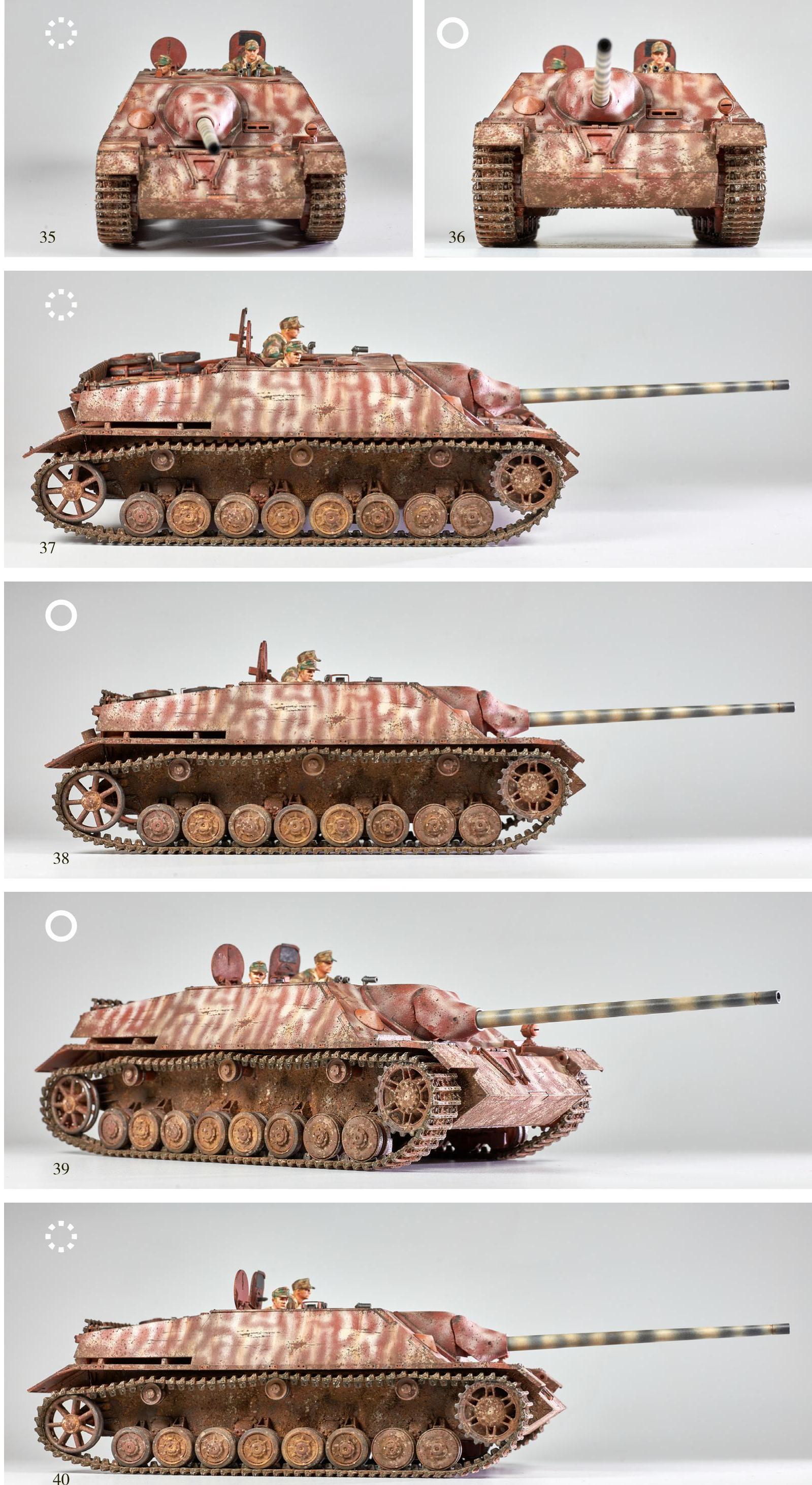
所谓固定视角,主要是指视点的高度。二战时德军士兵平均身高在175cm左右,视点高度取165cm。而四号坦克歼击车车身高度185cm,理论上讲站在地面上平视是看不到车顶的。加之在战场上,士兵会主动压低身高减小受弹面积,视点会比平时更低。
在右侧的一组照片中,图35和图37中已经能看到部分车顶了,说明视点在(真实世界的)2m以上。显然这是有些反常的。图38中,视点略微低于车身,属于比较正常的视角。图36中,视点被压低到主动轮附近,使原本低矮的四号歼击车看起来更加挺拔。
在另一组照片中,战车被旋转了一定的角度。图35的战车完全垂直于视线,属于经典的正视图。图39的战车旋转了约30度,正面与侧面呈现黄金分割比例,立体感非常好。但是图40中,战车仅旋转了一点点角度,不是正视图,也没有利用比例关系增强立体感,有些不伦不类。在拍摄时应该尽量避免使用这样尴尬的视角。
还有些常用的拍摄角度,在下面的一组图片中进行介绍(如图41~图52)。
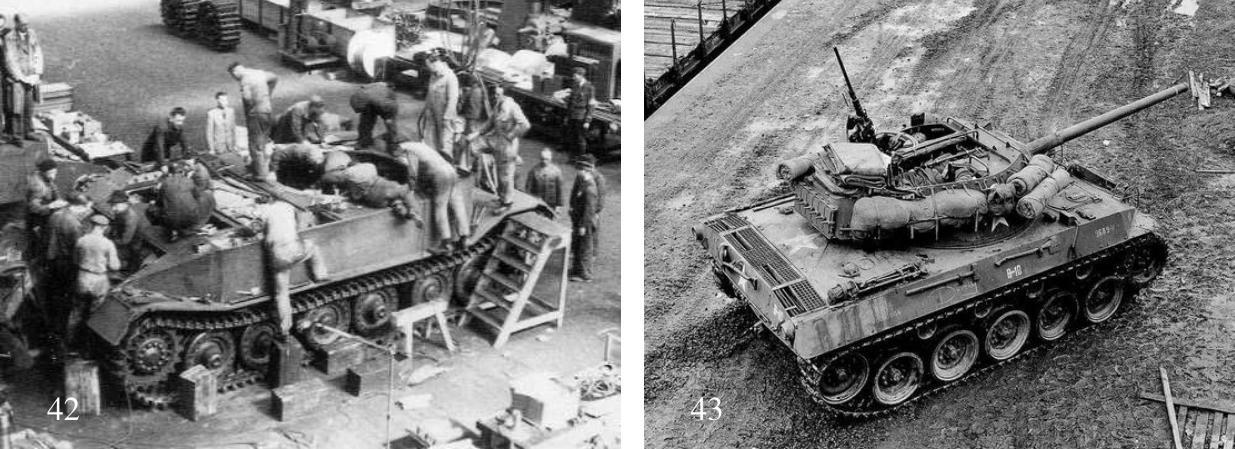
鸟瞰:视点很高,一般是站在建筑物等高处观察战车,展示的内容最为丰富。但是拍摄时镜头不宜架得太高,那样立体感会比较差。模拟二、三层楼的高度较为合适(如图41~图43)。

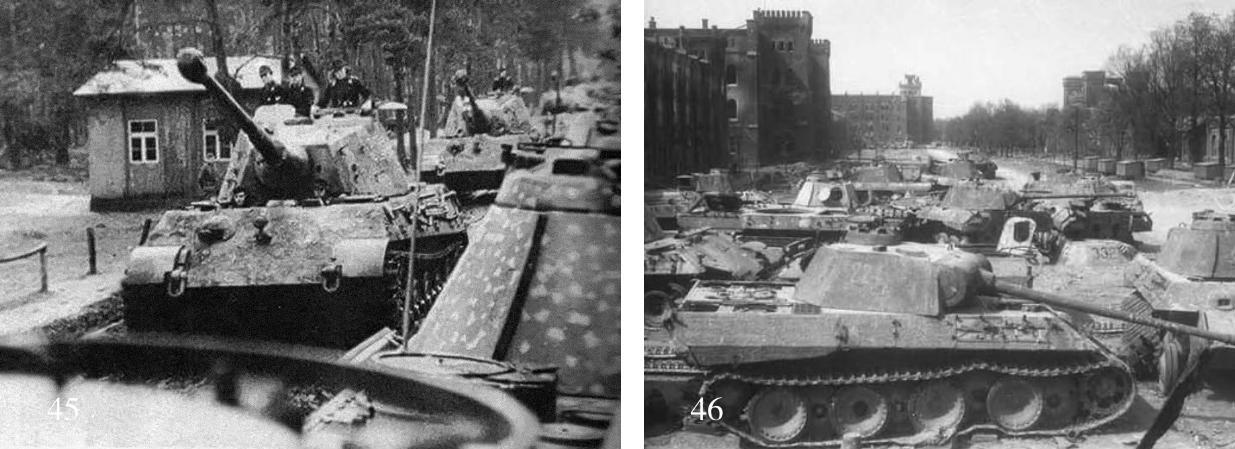
半鸟瞰:视平线在炮塔处,比鸟瞰要低些,一般是站在或坐在战车上拍摄别的坦克。细节表现很好,但是冲击力略显不足(如图44~图46)。


人视:人眼睛的高度大约在虎王坦克侧面的随车工具处,把视平线设在这里进行拍摄是最常见的视角,客观性、真实性强(如图47~图49)。


狗视:视平线比人视更低,尽量贴近地面(其实就是战场上趴着或蹲着的士兵看坦克的角度)。这样拍出的照片冲击力和现场感最强,适合拍摄所有类型的战车(如图50~图52)。

拍摄角度对人物模型来说更为重要。仰拍会使人物显得挺拔,俯拍会使人物显得低矮(如图53、图54)。
角度不同,还会影响照片的尺度感。在一开始的照片中,远处的亭子过于矮小而人物又过于高大,好似女巨人。于是笔者把镜头略微向下偏转,让建筑变大,再把模型向下平移,让人物在画面中占据适当的空间。虽然手办不大,但周围景色衬托得非常好,成功营造了少女在湖边漫步的意境(图56~图57)。


有关模型摄影与特效场景技术指南的文章

在带有旋转刀具的数控机床中,更换主轴头换刀是一种比较简单的换刀方式。通常由转塔的转位更换主轴头,实现自动换刀。当数控系统发出换刀指令时,各主轴头依次地转到加工位置,并接通主运动,使相应的主轴带动刀具旋转;其他处于不加工位置上的主轴均与主运动脱开。最后通过液压拨叉移动齿轮3,使其与新更换完主轴的齿轮12相啮合。为保证主轴的刚性,需限制主轴数目。......
2023-06-23

该装置能通过控制风机的风量来控制风板完成规定动作,风板控制装置参考示意图见图I-1。图I-1风板控制装置参考示意图二、要求1.基本要求预置风板控制角度。动作完成后风板平稳停留在终点位置上。显示风板设置的控制角度。风板的运动状态,都要通过控制风机的风量来完成,不能受机械结构或其他外力的控制。风板由静止开始运动到规定控制角度的时间定义为过渡过程时间。......
2023-06-23

本系统设计的电动机驱动模块主要采用L298N作为驱动器,通过单片机的I/O输入改变芯片控制端的电平,即可以对电动机进行正转、停止等操作。表23-4 输入引脚与输出引脚的逻辑关系L298N引脚说明如下:5V:芯片电压5V。VCC:电动机电压,最大可接50V。图23-12 电源与电动机驱动原理图......
2023-11-04

步进电动机又称脉冲电动机或阶跃电动机。步进电动机的机理是基于最基本的电磁铁作用。图6-39步进电动机系统框图无刷,电动机本体部件少,可靠性高。10)运行频率运行频率是指拖动一定负载使频率连续上升时,步进电动机能不失步运行的极限频率。图6-43矩频特性图6-44惯频特性14)单步响应单步响应是指步进电动机在带电不动......
2023-06-26

直流减速电动机,即齿轮减速电动机,是在普通直流电动机的基础上,加上配套齿轮减速箱。减速电动机广泛应用于钢铁行业、机械行业等,使用减速电动机的优点是简化设计、节省空间。图6-33所示为减速电动机的类型。确定直流减速电动机的输出轴扭矩。直流减速电动机的规格型号较多,所以在选择时,需要充分了解这些产品的参数和用途,以便更好地选择适合的型号。......
2023-06-26
伺服电动机都带有这种反馈控制的机制。伺服电动机是将输入的电压信号转换为转矩和转速以驱动控制对象。交流伺服电动机也是无刷电动机,可分为同步和异步电动机。......
2023-06-26
尤其不能将扶手带折弯,否则扶手带的使用寿命将缩短50%。当扶手带表面有发热情况时,应尽快对扶手带的驱动装置和导向机构进行检查和调整,排除不良因素。变形 反复弯曲导致开口尺寸变大,扶手带与导轨的配合发生松动,与导轨的侧隙超过8mm。......
2023-06-15
表7.3所列为三相六拍脉冲代码,按正、反转要求顺次提取代码,通过接口输出脉冲,改变读取一次数据的时间间隔,可以控制步进电动机转速。图7.8 单电压驱动电路1)单电压驱动电路。高、低压驱动电路采用两路电源供电,如图7.9所示,高压U1一般为80V,低压U2为步进电动机额定电压,一般为20V以下。恒流斩波驱动绕组电流上升快、边沿陡,响应好,功耗小,输出转矩稳定,并可减少步进电动机的共振现象发生。......
2023-06-19
相关推荐