图10-1气体继电器安装示意图1—气体继电器;2—油枕我国目前采用的气体继电器有三种型式,即浮筒式、挡板式和复合式,其中复合式气体继电器具有浮筒式和挡板式的优点,在工程实践中应用较多。现以QJ1—80型气体继电器为例,来说明气体继电器的动作原理。如图10-2所示为QJ1—80型复合式气体继电器结构图。......
2023-06-24
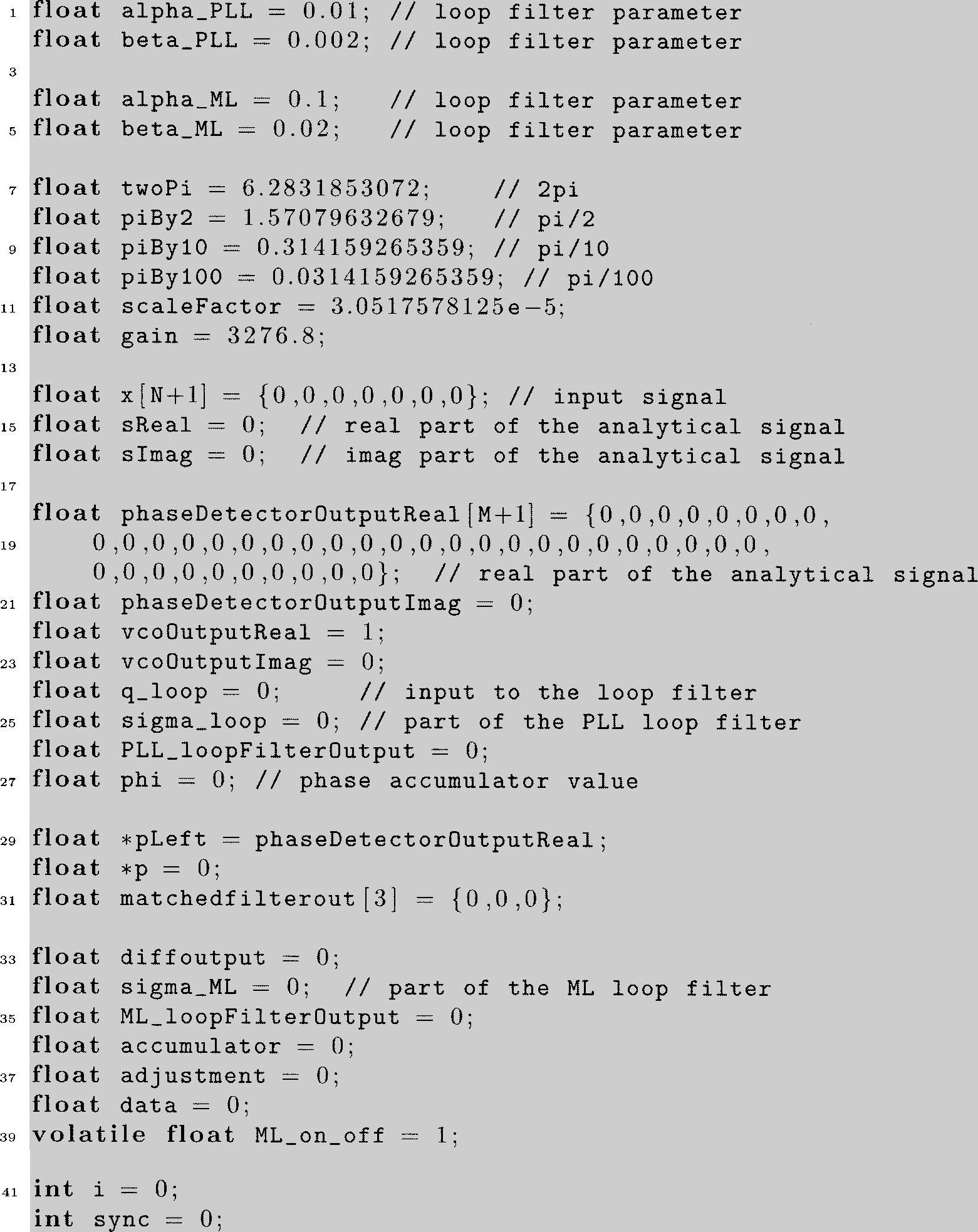
程序清单17.3和17.4是BPSK接收机的实时实现程序代码。程序清单17.3提供了使用的大部分变量的声明。程序清单17.4实现了这个算法。这个应用程序的运行文件在本书CD中第17章的ccs\DigRx目录下。最有趣的主文件是BPSK_rcvr_ISRs.c。它包含一些终端服务过程。这个文件包含大多必要的变量声明和执行BPSK接收机工作流程。
程序清单17.3:BPSK接收机工程代码的变量声明部分
程序清单17.3的相关解释如下。
(1)第1、2行:声明PLL环路滤波器的参数。
(2)第4、5行:声明ML同步恢复环路滤波器的参数。
(3)第7~12行:声明许多算法中用到的常量。
(4)第14~27行:声明执行PLL所需要的一些必要的变量。
(5)第29~31行:声明执行MF所必需的一些变量。
(6)第33~38行:声明执行ML同步恢复环路所必需的一些变量。
(7)第39行:声明一个标志位来表示ML同步恢复环路的开和关。在同步恢复环路中这可以用于显示无误差控制过程的效果以进行对比。
(8)第41行:声明用于环路的整数标识。
(9)第42行:声明通过第2个数码通道发射同步定时脉冲的整数同步信号。这个同步脉冲可以用于触发示波器来创建一个眼图。
程序清单17.4:BPSK接收机工程代码的算法部分
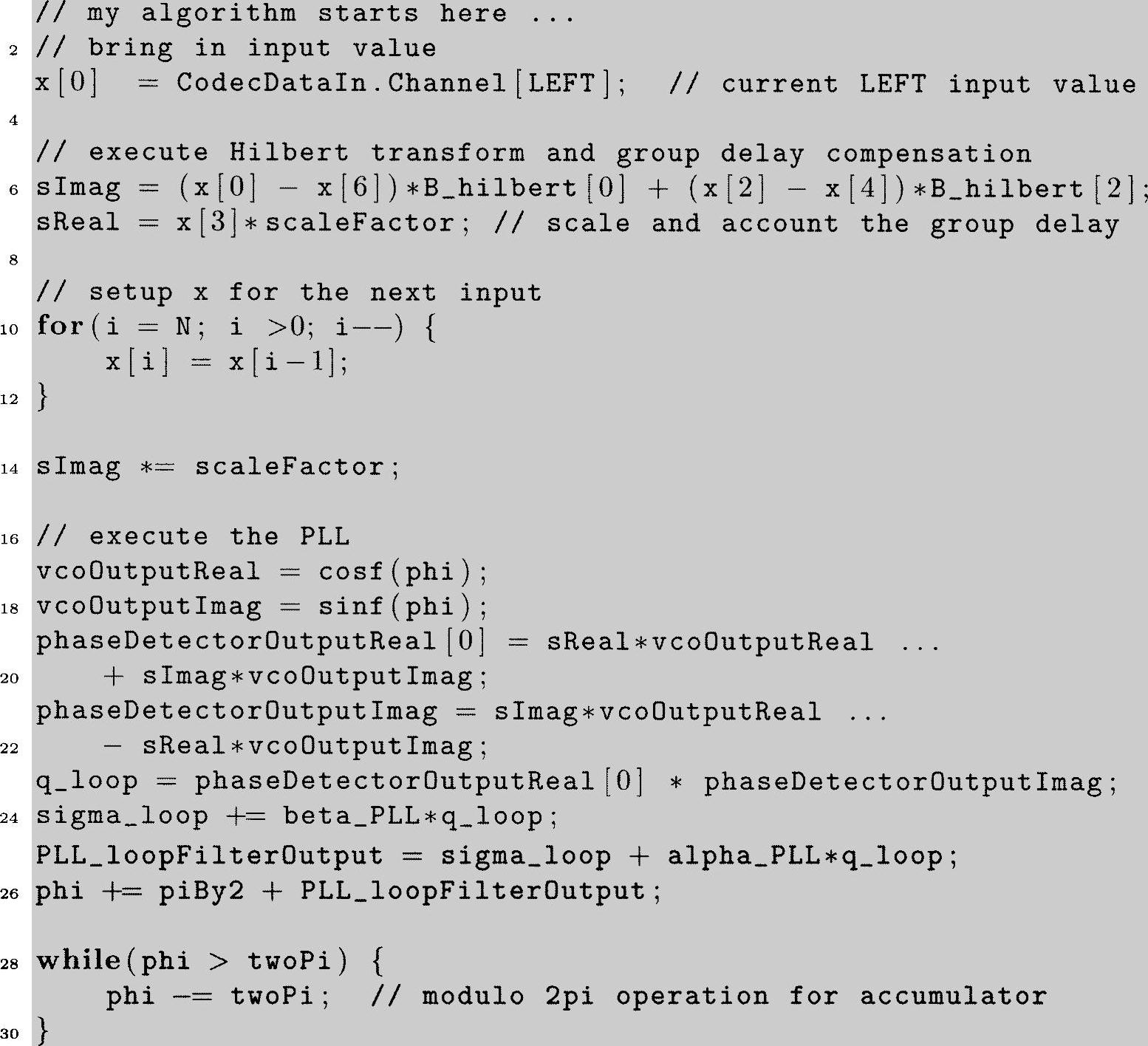
程序清单17.4的相关解释如下。
(1)第3行:将输入数值引入到ISR中。
(2)第6行:对输入信号执行Hilbert变换。观察CCS工程中的文件hilbert-c的B_hilbert的系数可以发现不仅奇数项都是对称的,而且3个奇数项都等于零。这大大简化了FIR滤波器需要执行的点积操作。图17.10显示了在这个滤波器其他系数设置为0的情况下,与Matlab设计的原始通带频率响应的详细比较。要注意的是,这个滤波器在感兴趣的频带非常接近平坦特性(12±2)kHz。只有到纵坐标单位是mili-dB(mdB)时才能明显察觉到这一点。这个图显示了在这两个滤波器中非常小但不可避免的通带纹波。
(3)第7行:对信号应用归一化因子,这可以说明PLL之前的Hilbert变换FIR滤波器所引入的群延时。
(4)第10~12行:在下一个ISR调用时更新x的缓冲数值。
(5)第14行:对PLL之前的信号施加归一化因子。
(6)第17~30行:实现PLL。
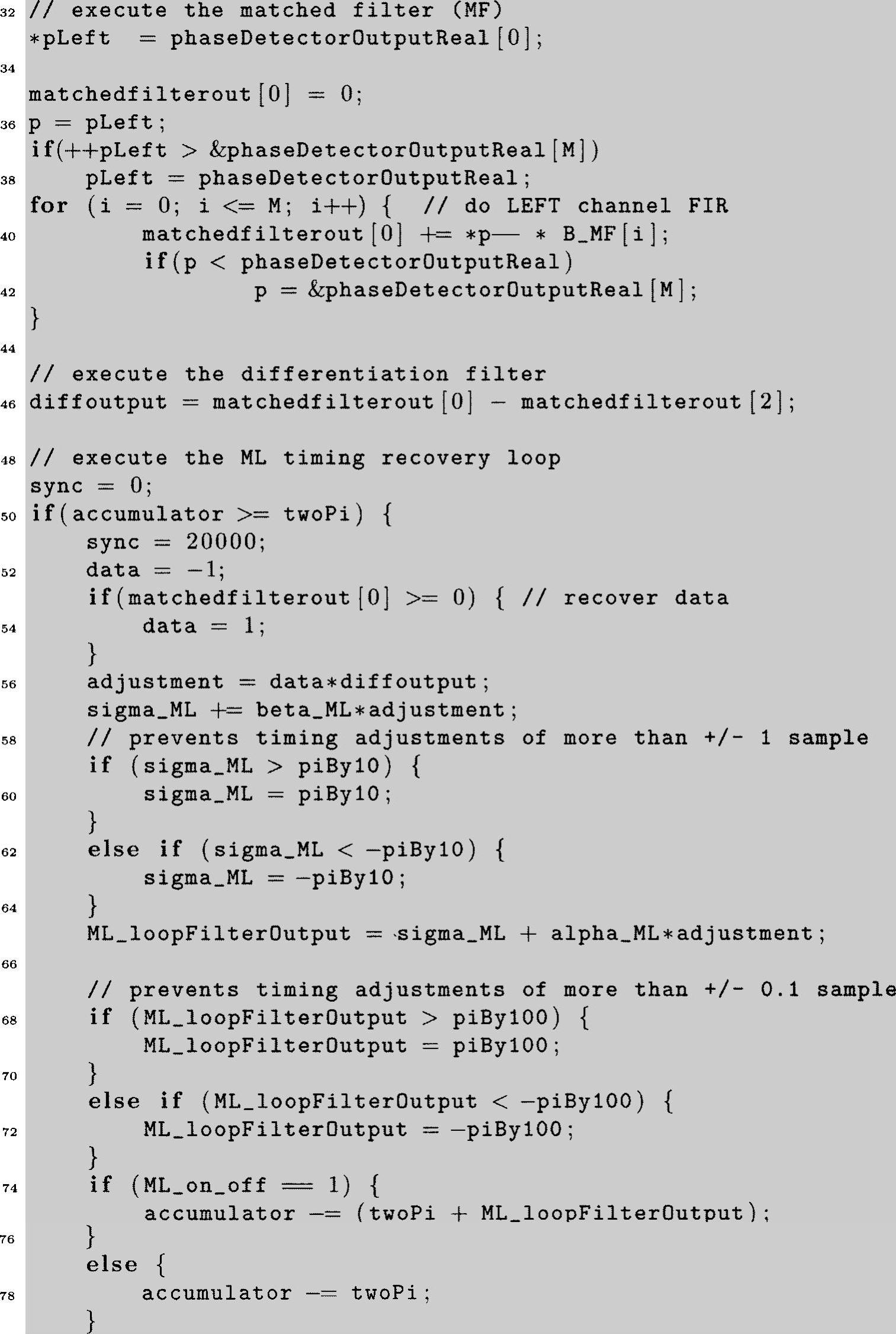
(7)第33~43行:实现基于FIR的匹配滤波器。
(8)第46行:使用2阶差分FIR滤波器,这可以精确地逼近导数。
(9)第49行:关闭编码同步通道脉冲。
(10)第50~80行:执行ML同步定位环路的功能。
(11)第50行:当所有的ML同步环路NCO大于2π时,激活采样过程,它提供下面两路输入到ML同步环路。
(12)第51行:驱动编码输出同步脉冲为高。
(13)第52~55行:执行探测器(分类判断器)来确定接收到的是哪个符号。
(14)第56行:对精确对准的匹配滤波器和它的导数的输出执行同步误差检测操作(相乘)。
(15)第57~73行:执行ML同步恢复环路的环路滤波功能(下面是具体的细节)。
(16)第57~64行:执行滤波器的IIR部分,注意要使用一个非线性元件(限幅器)来阻止输出超过±π/10rad(±1采样)。
(17)第65~73行:完成环路滤波器的实现,并且加入其额外的限幅器来阻止总的误差超过±π/100rad(±0-1采样)。
(18)第74~79行:在ML环路滤波器开启时将ML同步恢复环路误差加入到NCO,否则环路滤波器运行在名义符号率下(2400Symbol/s)。
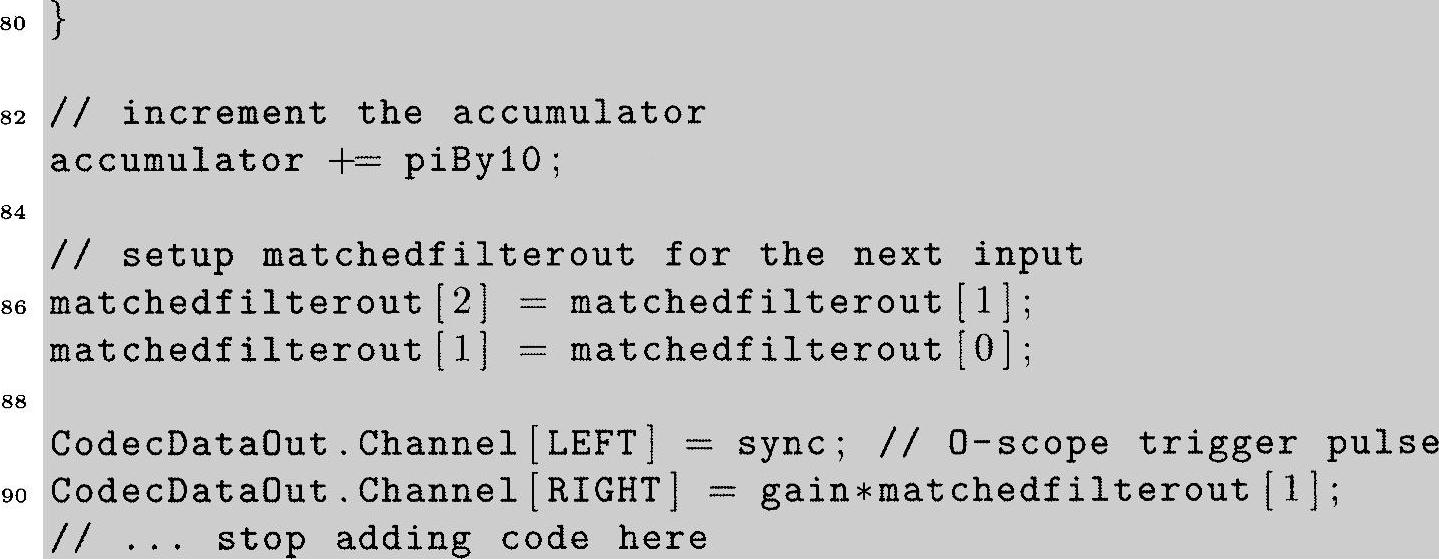
(19)第83行:每次ISR调用时,ML同步环路NCO的相位增加π/10rad,这就设定NCO的正常运行速度为其符号速率(2400Symbol/s)。
(20)第89、90行:将同步信号输出到编码的左通道,带有群延时的匹配滤波器输出到编码右通道。
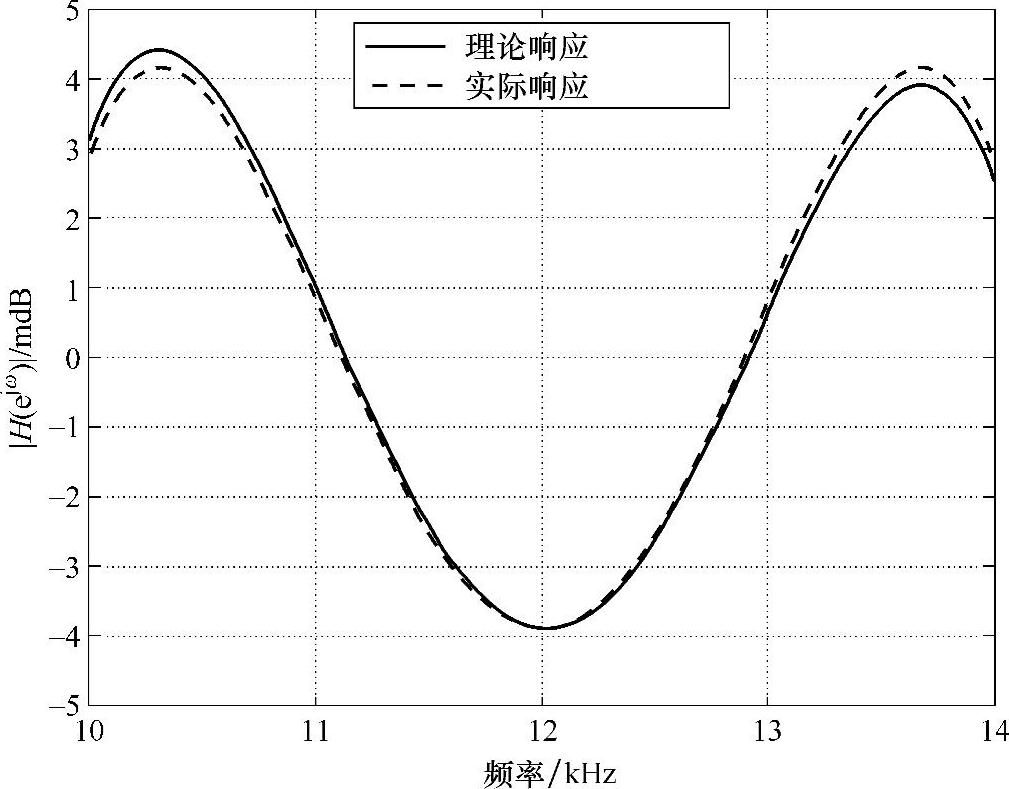
图17.10 对Matlab设计的Hilbert变换滤波器的带通频率响应和其他的系数都被设置为零的情形下的相同滤波器的带通频率响应进行比较(注意到纵坐标是mdB(mili-dB))
有关实时数字信号处理:基于TMS320C6x DSK平台的Matlab到C的文章

图10-1气体继电器安装示意图1—气体继电器;2—油枕我国目前采用的气体继电器有三种型式,即浮筒式、挡板式和复合式,其中复合式气体继电器具有浮筒式和挡板式的优点,在工程实践中应用较多。现以QJ1—80型气体继电器为例,来说明气体继电器的动作原理。如图10-2所示为QJ1—80型复合式气体继电器结构图。......
2023-06-24

例如,将以2000线的编码器直接安装连接在转速为5000r/min的电动机上,则可以计算得到QEPA和QEPB的信号频率为166.6kHz,所以通过测量QEPA或QEPB的信号频率,即可得到电动机的转速。将G、H 用电压U、电流I代替,就可以完成方向元件的比较。按式 计算得到的Δi实质是用叠加原理分析短路电流时的故障分量电流,负荷分量在式 中被减去了。......
2023-06-24

现代工业平缝机是一种由数百甚至上千种零件所组成的、高速运行的精密机器。从完成一个线迹的过程来看,工业平缝机主要由机针、梭、挑线杆和送料牙四个主要成缝构件,按一定顺序进行工作完成的。这四个构件分别属于平缝机的刺料机构、钩线机构、挑线机构和送料机构。此外,工业平缝机还必须具备驱动系统、机架、工作台板、电动机、电器和绕线等装置。对于自动高速平缝机,还要装备自动功能执行系统和自动控制系统。......
2023-06-22

学习目标1.了解天窗系统的作用、组成和工作原理。如图7-40所示,天窗系统主要由天窗开关、天窗电动机、控制单元、天窗总成等组成。当钥匙在ACC、ON档时,可以通过天窗开关来操作天窗系统。②已换上新的天窗电动机。2)确保滑动天窗完全关闭。6)检查自动操作系统是否正常工作。......
2023-09-17

数字信号通过缓冲器这样的逻辑电路,就转换成能够正确传达信息的数字信号,经常被用于数字信号和数字信号的接口电路有缓冲电路、功率放大器电路、脉宽变换电路等。图5-9将数字信号转换为数字信号图5-10扇出状态扇出数由源电流的值决定。输出和输入信号的频率比一般为整数分之一。当然,输入脉冲是由逻辑值“1”和逻辑值“0”构成的数字信号。......
2023-06-25
图6-7几种典型气动元件空压机;储气罐;气缸有不少机器人制造厂用气动系统制造了很灵巧的机器人。多数气动驱动用来完成挡块间的运动。气动系统的主要优点之一是操作简单、易于编程,所以可以完成大量的点位搬运操作的任务,但是用气压伺服实现高精度很困难。气动系统的动力源由高质量的空气压缩机提供。安装在多路接头上的电磁阀控制通向各个气动元件的气流量。气动元件工作压力低,故制造要求也比液压元件低。......
2023-06-26
数字集成电路与模拟集成电路不同,正如其名称一样,数字集成电路是用来处理数字信号的,即处理或者这两种逻辑信号。当使用数字集成电路时,重要的是需要对逻辑信号处于或者“High”“Low”的状态逐一加以确认。养成了这种习惯,对数字集成电路就可以运用自如了。图2-36非门除了非门以外,数字集成电路的主要基本元件还有与门、或门、与非门、或非门、异或门等。......
2023-06-25
高斯约化的基本原理实际上是通过加减消元的方法,对法方程系数阵和常数阵进行线性变换,将法方程系数阵变成上三角阵。以加减消元法对线性方程系数和常数组成的行进行消元变换,实际上是将其各元素减去另一行同列元素乘一个不为0的数,从而将某一未知数的系数变为0。由于法方程系数阵具有对称性这一特征,所以高斯约化法虽然原理与加减消元法相同,但是有其独特的规律。......
2023-10-22
相关推荐