按照自适应滤波系数矢量的变化与梯度矢量方向之间的关系,可写出LMS算法的公式如下:因为,所以这种瞬时估计法是无偏的。图9-6 自适应LMS算法信号流图由此可见,自适应LMS算法简单,它既不需要计算输入信号的相关函数,也不要求矩阵可逆。但是,由于LMS算法采用梯度矢量的瞬时估计值,它有较大的方差以致不能获得最优滤波性能。下面从收敛性、学习曲线和失调3个方面分析LMS算法的收敛性能。......
2023-06-23
当在未知统计特性的环境下处理观测信号或数据以获得所期望的结果时,利用自适应滤波器可以得到令人满意的解,其性能远超过通用方法所设计的固定参数的滤波器。如果一个实用系统含有较多的自适应子系统,则它在自适应学习性能方面将有较高的自适应的先进性。自适应滤波器的两个重要组成部分中核心是算法,用来调整滤波子系统结构的参数或滤波系数。算法是指调节自适应滤波系数的步骤,以达到在所描述准则下的误差最小化。自适应滤波含有两个过程即自适应过程和滤波过程。前一过程的基本目标是调节滤波系数θ(n)使有意义的目标函数或代价函数F(·)最小化,输出信号y(n)逐步逼近所期望的参考信号d(n),由两者之间的估计误差e(n)驱动某种算法对滤波系数进行调整,使滤波器处于最佳工作状态以实现滤波过程。所以,自适应过程是一个闭合的反馈环,算法决定了这个闭合环路的自适应过程所需要的时间。由于目标函数F(·)是输入信号x(n)、参考信号d(n)及输出信号y(n)的函数,因此目标函数必须具有以下两个性质:
1)非负性:F[x(n),d(n),y(n)]≥0 ∀x(n),d(n),y(n);
2)最佳性:F[x(n),d(n),y(n)]=0 d(n)=y(n)。
在自适应过程中,自适应算法逐步逼近使目标函数F(·)最小化,最终使y(n)逼近于d(n),滤波参数或权系数θ(n)收敛于θ0即自适应滤波系数的最优解。因此,自适应过程也是自适应滤波器的最佳线性估计过程,既要估计滤波器能实现期望信号d(n)输出的整个过程,又要估计滤波权系数以进行有利于主要目标方向的调整。这些估计过程是时变的,这就是自适应滤波器需要有的自适应收敛过程。
最小均方横向自适应滤波结构如图9-4所示。图中x(n)是输入信号,y(n)是输出信号,d(n)为y(n)想要趋近的理想信号且为已知,e(n)为误差信号。假设两个条件:1)输入信号x(n)和d(n)是广义平稳的;2)x(n)和d(n)的统计特性已知。
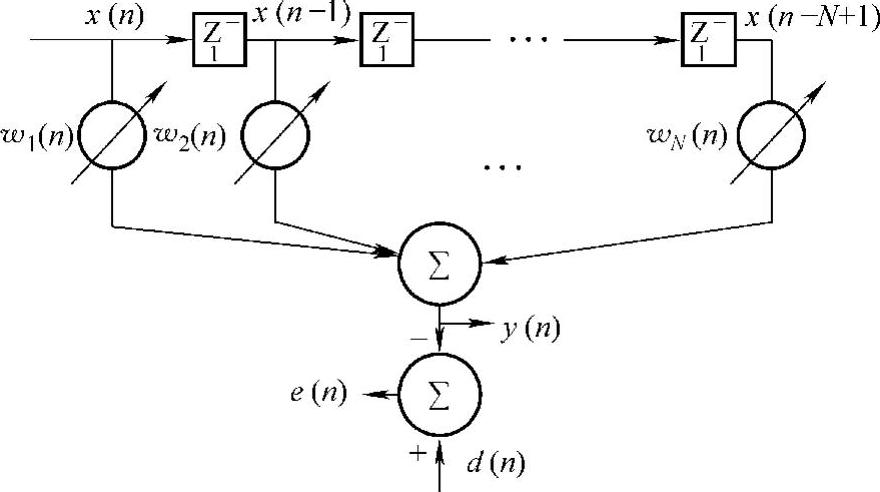
图9-4 用于联合参数估计的横式滤波结构
x(n)的自相关函数及与d(n)的互相关函数为

设加权矢量即滤波器系数矢量w=[w1w2…wN]T,滤波器在n时刻的输出为

相应的误差为
e(n)=d(n)-y(n)=d(n)-w·x (9-5)
自适应滤波器控制机理是用误差序列e(n)按照某种准则和算法对其系数{wi(n)},(i=1,2,…,N)进行调节,最终使自适应滤波的目标(代价)函数最小化,达到最佳滤波状态。按照均方误差(MSE)准则所定义的目标函数是
F[e(n)]=ξ(n)=E[e2(n)]=E[d2(n)-2d(n)y(n)+y2(n)](9-6)
将式(9-4)代入到式(9-6)中并整理得:

式(9-7)是均方误差性能函数,其中R是输入信号自相关矩阵。

P是输入信号x与期望d的互相关矢量,定义如下:
由式(9-7)可以看出,自适应滤波器的性能函数ξ(n)是w的二次函数,且矩阵R对称且非负定,因此ξ(n)有最小值。ξ(n)对w求梯度并使梯度等于零即可得到性能函数最小的最佳滤波系数为
w0=R-1P (9-10)
将上式结果代入到式(9-7)中并整理得到最小误差为
ξmin=E{d2(n)}-w0P (9-11)
当矩阵R和P已知时,可由式(9-10)直接求解,把此解称为维纳解即最佳滤波系数值。因为MSE函数是滤波系数w的二次方程,由此形成一个多维的超抛物曲面,这好像一个碗状曲面又具有唯一的碗底最小点,通常称之为自适应滤波器的误差性能曲面。当滤波器工作在平稳随机过程的环境下,这个误差性能曲面就具有固定边缘的恒定形状。自适应滤波系数的起始值{wi(0)}(i=1,2,…,N)是任意值,位于误差性能曲面上的某一点。经过自适应调节过程,使对应于滤波系数变化的点朝碗底最小点方向移动,最终到达碗底最小点得以实现最佳维纳滤波。
有关全相位数字信号处理方法及MATLAB实现的文章

按照自适应滤波系数矢量的变化与梯度矢量方向之间的关系,可写出LMS算法的公式如下:因为,所以这种瞬时估计法是无偏的。图9-6 自适应LMS算法信号流图由此可见,自适应LMS算法简单,它既不需要计算输入信号的相关函数,也不要求矩阵可逆。但是,由于LMS算法采用梯度矢量的瞬时估计值,它有较大的方差以致不能获得最优滤波性能。下面从收敛性、学习曲线和失调3个方面分析LMS算法的收敛性能。......
2023-06-23

本章节中,为确保目的端能够更完整地接收传输信号,以最小化目的端接收信号与轨旁源节点发送信号之间的均方误差为目标设计离散中继混合预编码矩阵,则优化目标函数表示为其中,中继节点的接收和发送预编码器同时被联合优化以使得系统中接收端具有最小的均方误差。......
2023-08-23

针对不同类型的信号,信号处理涉及的内容主要包含滤波、变换、检测、谱分析、估计、压缩、识别等方面。滤波的主要任务是设计特性数字滤波器以得到不同频率成分的信号分量,如高通滤波可得到信号的高频成分,中值滤波则可降低高频分量起到平滑的效果。检测和估计主要是从受噪声干扰的杂波中利用信号的统计特性得到有用信号的过程。压缩是信号处理的一个重要方面,它主要是消除信号自身的相关性从而达到减少数据量的效果。......
2023-06-23
衡量一种自适应算法的优劣一般有两个衡量标准,即参数收敛速度和收敛以后的稳态误差。这种情况下自适应滤波器大部分时间处在未收敛状态,收敛后的精度就显得不太重要。这种算法常采用最小二乘准则即把块内的误差平方求和后要求其和最小,自适应算法的速度和精度的矛盾可以在分块算法中得到体现。......
2023-06-23

将W-O算法成功运用于谱分析中,极大地减少了旁瓣的数量和幅度,提高了频谱分辨率和信号的检测能力。“重应用与实现”是本书的主要特点,书中提供的大量算法使结合本专业准备运用全相位滤波方法的读者具备了现成的分析和研究工具,也为正在研究全相位滤波理论的专家们提供了一定参考。......
2023-06-23

我们平时进行验算时,往往是重新计算一遍,看结果是否与上一次的结果相同。这相当于用两倍的时间来计算一个题目。而印度的验算法相当简单,首先我们需要定义一个方法N,它的目的是将一个多位数转化为一个个位数。有了这个定义,我们就能对加减乘法进行验算了。练习验算88+26=114验算94+63=157验算105-26=79验算6675-526=6149验算97×16=1552验算37×77=2849......
2023-10-27

用64阶ap对四种拓展信号过滤出s0及误差对比如图2-43所示。图2-43 ap四种延拓与传统法恢复信号误差比较由图2-43可看出,四种拓展方式在经历64个采样周期后误差均小于传统方法,其中以奇对称误差最小。图2-43再次证实,ap较好地克服了传统分段引起的“跳跃”问题。......
2023-06-23

同时,Gabor滤波方法具有时域和频域的联合最佳分辨率,能达到时频测不准的下界[83],因此能很好地实现多分辨率的时频分析。图3-1Gabor小波的尺度和方向选择特性由于Gabor小波具有良好的视觉仿生学性质,能够捕获纹理图像中多个尺度和方向的纹理特征,Gabor小波在纹理图像的特征提取和识别领域具有独特的优势,受Gabor小波良好性质的启发,研究人员提出了一系列基于Gabor滤波的纹理图像特征提取和识别方法。......
2023-06-29
相关推荐