8 如何制服自己的愤怒愤怒是一种很常见的情绪,特别是年轻人:比如血气方刚的小伙子。制服愤怒的重点在于理清愤怒来源,有效表达它。愤怒并不排除爱、感激等积极情感。学会区分短期的愤怒和长期的怨恨。找个笔记本记下你在不同情境下对不同人的愤怒程度,并分清自己的愤怒共有多少种类。通过了解自己愤怒的来源,我们可以把愤怒的能量转化为建设的动力。......
2023-12-01
1.问题的提出
控制的依据:(XT-XF)
控制的目标:(XF≈XT)→(XT-XF)≈0
当出现偏差区,修正偏差所需要的时间较长。另外,偏差不易完全消除。
控制过程存在的问题如图5-36所示。
2.比例增益环节(P)
引入比例增益(P)如图5-37所示。
根据频率给定信号XG接受差值ΔX干预的特点,如果将偏差信号放大KP倍后,再干预频率给定信号,则根据公式ΔX=XG/KP可知,当比例增益越大,偏差越小,储气罐的实际压力越接近于目标值。
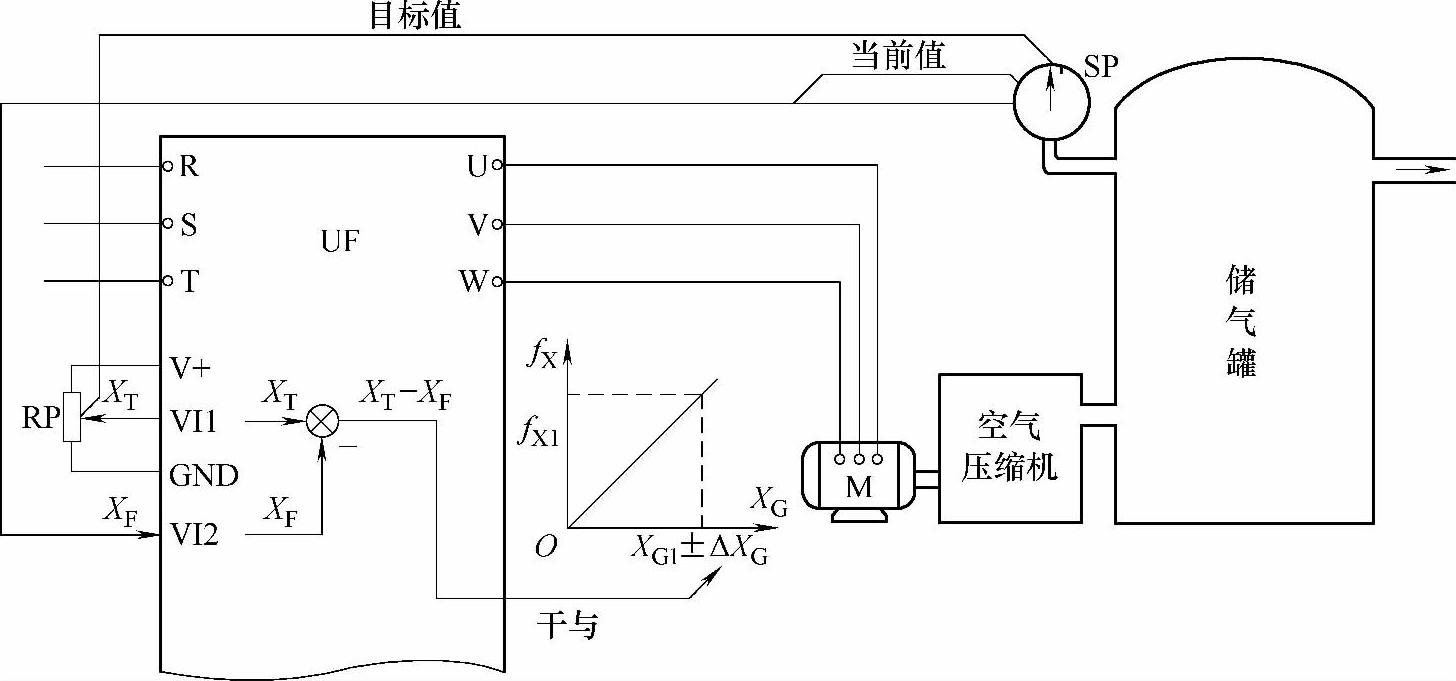
图5-36 控制过程存在的问题
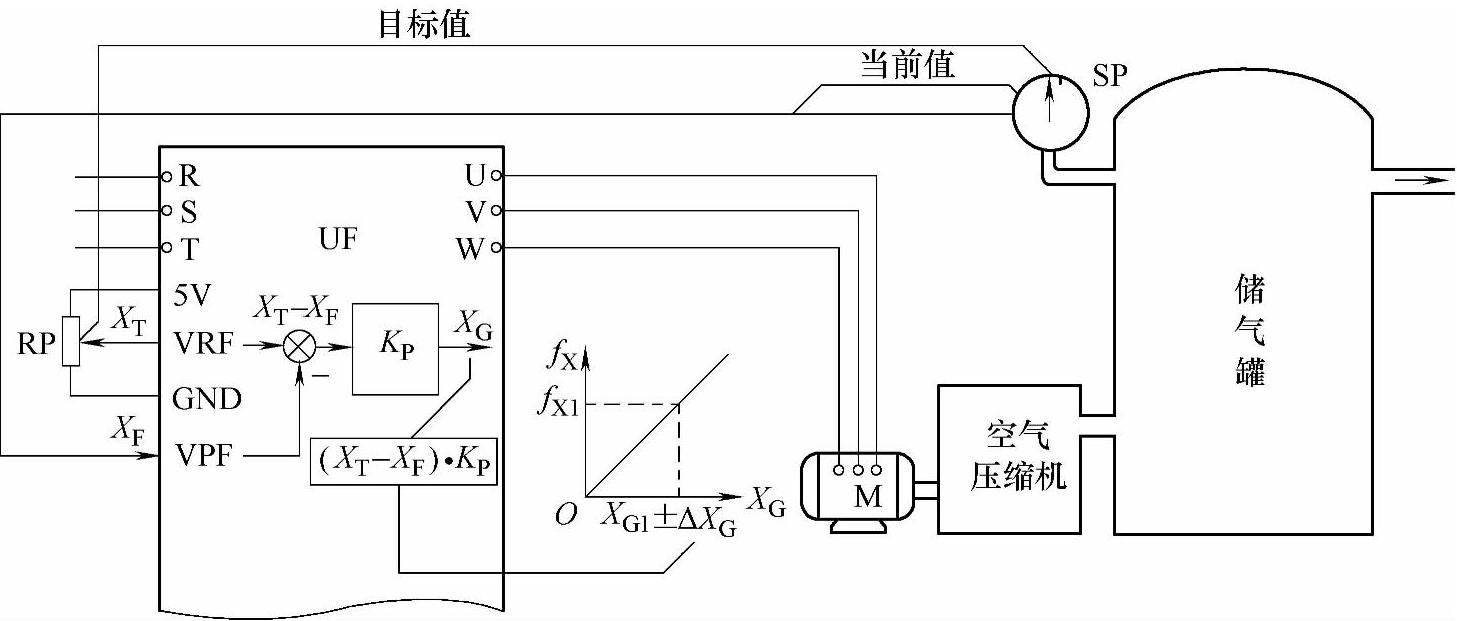
图5-37 引入比例增益(P)
比例增益与静差的关系见下表。

3.P调节出现的问题
P的大小与振荡如图5-38所示。

图5-38 P的大小与振荡
a)P调节的含义 b)P调节的结果
比例增益KP的大小,一方面决定了实际压力接近目标压力的快慢和偏差的大小,另一方面,KP越大虽然可以使偏差迅速减小,但ΔX不能消除,且易出现超调,因此引入积分环节。
4.PI调节
为了防止超调,可以适当减小比例增益,而增加积分环节,积分时间的长短,决定了积分增量的大小,从而决定了信号增加的快慢。
PI的含义与作用如图5-39所示。
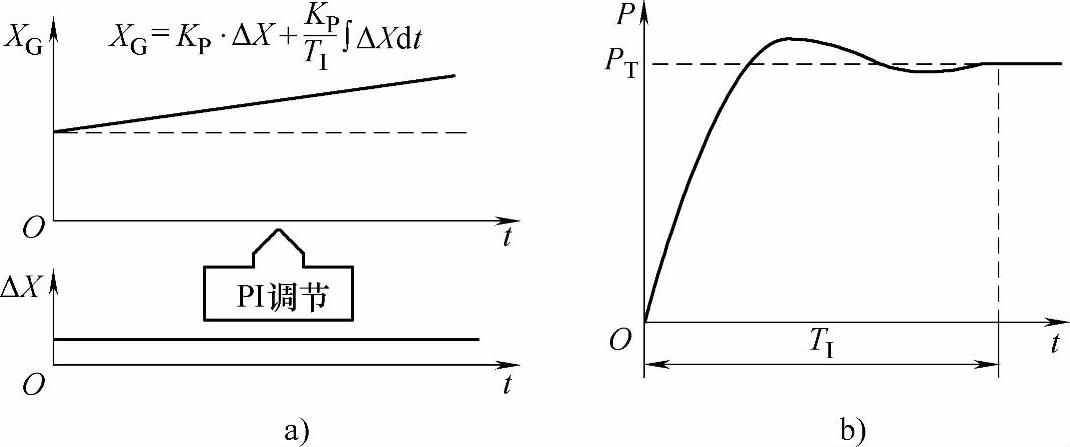
图5-39 PI的含义与作用
a)PI调节的含义 b)PI调节的结果
5.PD调节
PD的含义与作用如图5-40所示。
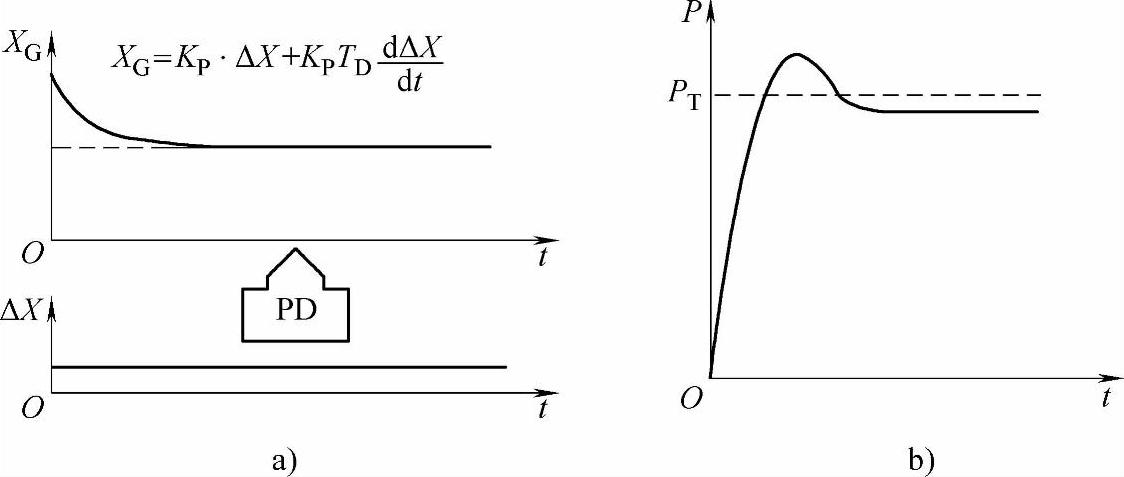
图5-40 PD的含义与作用
a)PD调节的含义 b)PD调节的结果
对于某些容易发生振荡的系统,KP只能设定得小一些,于是又会发生当用气量急剧变化时,被控量难以迅速恢复的情况,微分控制是根据偏差变化率的大小提前给了一个相应的调节动作。
微分D只是在被控量刚发生变化时,迅速地根据趋势做出反应,因此其作用时间通常是很短的。
6.PID调节
PID的含义与作用如图5-41所示。
根据以上分析,结合生产实际情况,可以引入PID调节功能,针对不同的被控对象的要求,实现不同的控制功能。
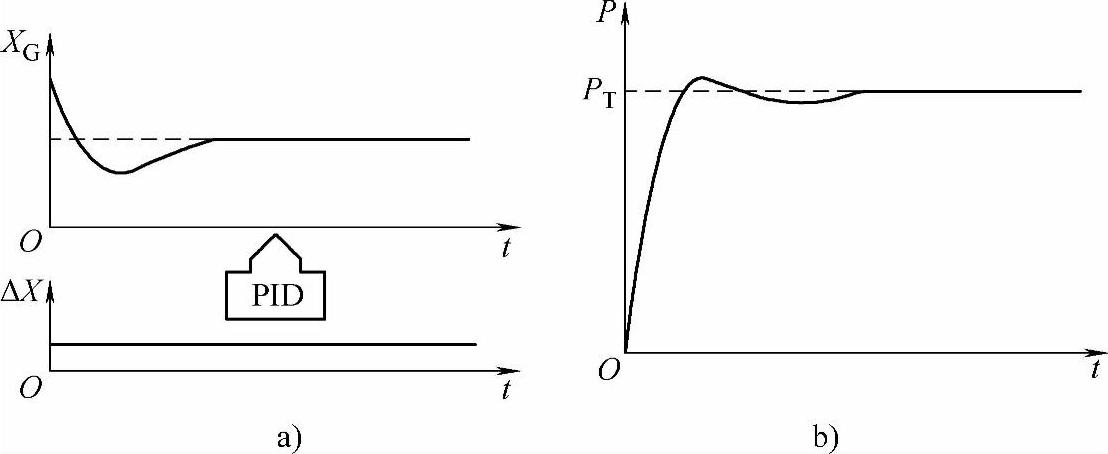
图5-41 PID的含义与作用
a)PID调节的含义 b)PID调节的结果
有关丹佛斯变频器控制技术的文章

8 如何制服自己的愤怒愤怒是一种很常见的情绪,特别是年轻人:比如血气方刚的小伙子。制服愤怒的重点在于理清愤怒来源,有效表达它。愤怒并不排除爱、感激等积极情感。学会区分短期的愤怒和长期的怨恨。找个笔记本记下你在不同情境下对不同人的愤怒程度,并分清自己的愤怒共有多少种类。通过了解自己愤怒的来源,我们可以把愤怒的能量转化为建设的动力。......
2023-12-01

功能块PULSEGEN和功能块CONT_C一起,可实现具有脉冲输出的控制器,用于控制比例执行器。在参数分配期间,用户可以激活或取消激活PID控制器的子功能,以使控制器适合实际的工艺过程。......
2023-06-18

PI控制器在频率较低时主要起积分器的作用,而在高频时主要起线性比例放大器的作用。如果输入信号为单位阶跃信号时,其单位阶跃响应为其中,Kp=-R1/R0,PID控制器比例系数;Ti=R1C1,PID控制器积分时间常数;Td=R2C2,PID控制器微分时间常数。随着C2充电,反馈到输入端的电压逐渐增大,控制器输出电压逐渐降低。图4-7 PID控制器a)原理图 b)响应曲线......
2023-06-30

连续控制系统中的PID控制规律为式中 KP——比例系数;TI——积分时间常数;TD——微分时间常数;e——偏差;u——控制量。一个线性连续系统的模拟PID控制系统原理框图如图10-36所示。图10-36 模拟PID控制系统原理框图一个PID调节器的比例系数、积分时间常数和微分时间常数一旦确定,该控制器的性能随之确定。比例控制可以迅速反应误差,并减小稳态误差。积分控制的作用:积分控制可以对系统误差进行积分,输出控制量,以消除误差。......
2023-08-30

PID功能块提供了比例、积分和微分形式的计算控制。PID运算是非迭代或ISA标准的算法。只要偏差存在,PID功能将对偏差进行积分运算,即将输出向纠正偏差的方向进行。图7-16 PID控制算法功能块PID1.正向和反向作用通过选项参数CONTROL_OPTS中的“Direct acting”位来设置运动的正向或反向作用。若TRK_IN_D或TRK_VAL状态为不可用,输出跟踪功能将关闭,PID状态将回到正常操作状态。......
2023-11-22

程序和顺序控制程序控制中的被控制量是时间的函数,被控制量按照预先规定的时间函数变化,如单晶炉的温度控制。比例积分微分控制控制器的输出是控制器输入的比例、积分、微分函数的组合。PID控制是应用最广、最常见、最易懂的控制技术。PID控制结构简单、参数容易调整,因此,无论模拟控制器或者数字控制器,多数使用PID控制。存在随机扰动信号的系统,仅用PID控制是达不到满意的性能指标的。......
2023-06-29

表1-30 采样周期的经验数据3.PID回路控制指令S7-200的PID指令没有设置控制方式,执行PID指令时为自动方式;不执行PID指令时为手动方式。PID指令的功能是进行PID运算。当PID指令的允许输入EN有效时,即进行手动/自动控制切换,开始执行PID指令。在一个应用程序中,最多可以使用8个PID控制回路,一个PID控制回路只能使用1条PID指令,不同的PID指令不能使用相同的回路编号。......
2023-06-26

单片机对于焊接参数的控制,可以通过编程实现有关工艺参数的PID控制算法,利用单片机强大的逻辑功能,可以使PID控制更加灵活。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。......
2023-06-26
相关推荐