【摘要】:宽带通优化设计SSDC的控制系统由换流母线三相瞬时电压测量环节、次同步频率变换环节、带通滤波器、优化设计相位补偿及比例放大环节组成,该SSDC的输入信号为呼辽HVDC整流站换流母线的交流三相电压。图7-20 宽带通优化设计SSDC控制系统结构在理论和实现方法上,上述SSDC的两种设计都是可以实现的,并且能为待研发电机组提供较好的电气正阻尼,但是宽带通优化设计SSDC具有更强的通用性和工程实用价值。
SSDC的控制系统可以采用窄带通分模态控制方法,也可以采用宽带通的优化设计方法。窄带通分模态控制的SSDC必须以轴系的准确建模或自然扭振频率的准确获取为基础,针对存在次同步振荡的汽轮发电机组的自然扭振频率分别设计窄带通滤波器进行分模态的相位补偿和增益调节,从而实现为发电机组提供正的模态阻尼。这种方法设计的SSDC可以显著地提高被控模态的电气阻尼能力,但是有可能对相邻的其他发电机组造成负阻尼的影响。宽带通优化设计方法设计的SSDC是在机组存在次同步振荡问题的一段频率范围内设计一个带通滤波器,带通范围一般为HVDC的低通频带,对所有的振荡模态进行共同的相位补偿。这种方法设计的SSDC需要采用优化算法进行参数整定,可为机组的严重振荡模态提供较强的正阻尼。一般而言,与窄带通分模态控制相比,它能提供的正阻尼相对较小,但会使系统中所有机组阻尼增强。
窄带通分模态控制SSDC的控制系统由信号输入、分模态控制、相位补偿、增益调节以及限幅环节组成,该SSDC的输入信号取伊敏电厂两台汽轮发电机组转速偏差的平均值。其控制系统结构如图7-19所示[22,23]。
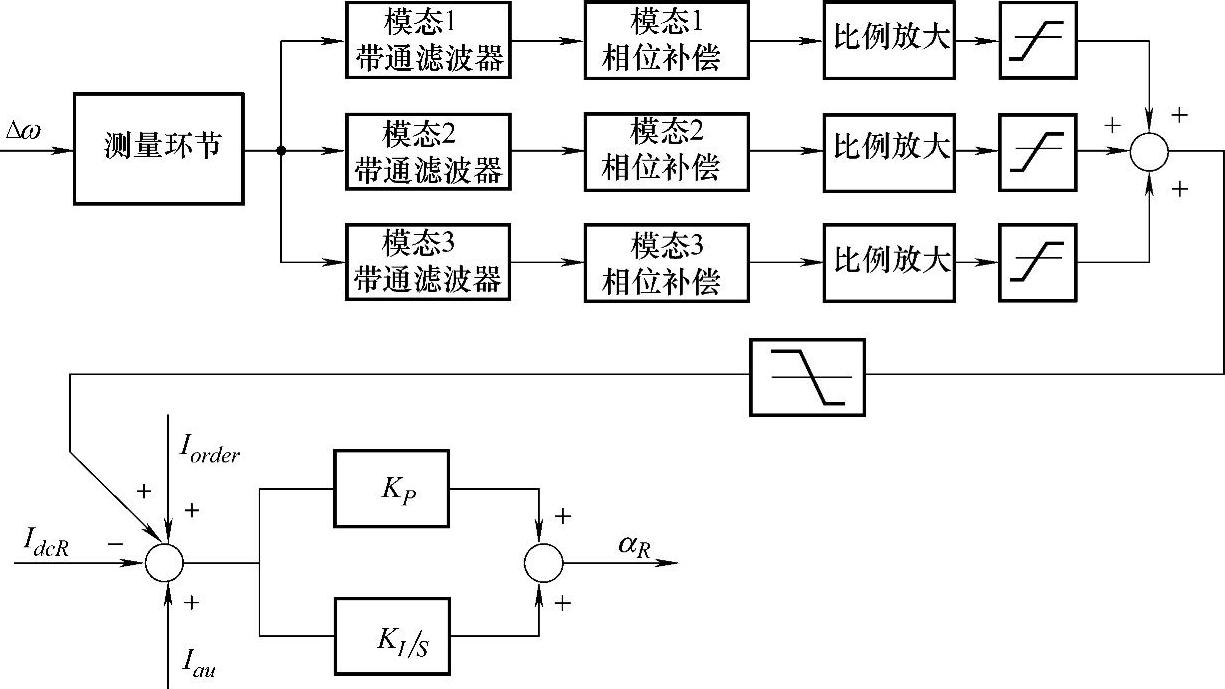
图7-19 窄带通分模态控制SSDC控制系统结构
图中,Iorder为直流定电流控制指令值;IdcR为HVDC整流侧直流电流;Iau为HVDC的附加控制信号;αR为HVDC整流侧换流器触发延迟角。
宽带通优化设计SSDC的控制系统由换流母线三相瞬时电压测量环节、次同步频率变换环节、带通滤波器、优化设计相位补偿及比例放大环节组成,该SSDC的输入信号为呼辽HVDC整流站换流母线的交流三相电压。其控制系统结构如图7-20所示。
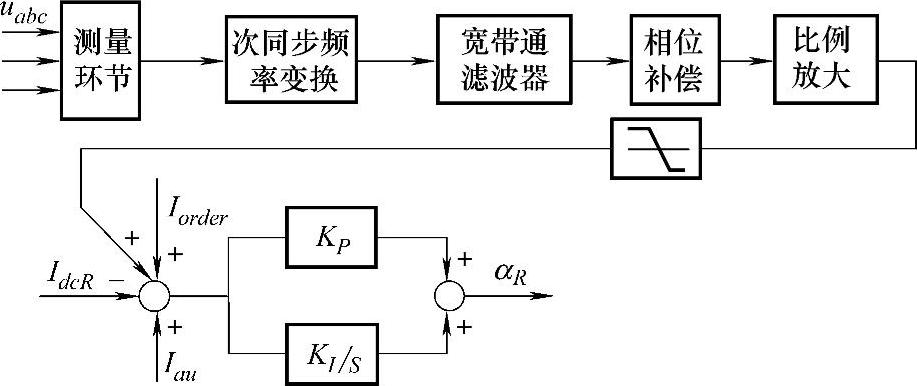
图7-20 宽带通优化设计SSDC控制系统结构
在理论和实现方法上,上述SSDC的两种设计都是可以实现的,并且能为待研发电机组提供较好的电气正阻尼,但是宽带通优化设计SSDC具有更强的通用性和工程实用价值。本节将主要论述和研究宽带通SSDC的设计及其对交直流系统的影响。
在宽带通SSDC的设计中,次同步频率变换环节是整个SSDC控制系统的核心环节,从前面的SSDC控制策略以及SSDC抑制SSO的原理分析知道,SSDC的输入信号的频率必须能反映需要阻尼的发电机组轴系扭振的次同步频率特性,而HVDC整流侧换流母线的交流电压只含有与轴系扭振频率互补的次同步和超同步电压分量,并且这些量与工频电压相比幅值非常小。因此,如何从换流母线电压三相瞬时值提取出需要阻尼的次同步分量是SSDC设计的关键。
经过如图7-21所示的αβ直角坐标变化以及dq同步坐标变换后,可以从含有能反映SSO的交流三相电压中提取出需要阻尼的发电机组的轴系扭振模态频率。以下对次同步频率变换环节的原理进行分析。
ua、ub、uc为换流母线交流系统的三相电压:
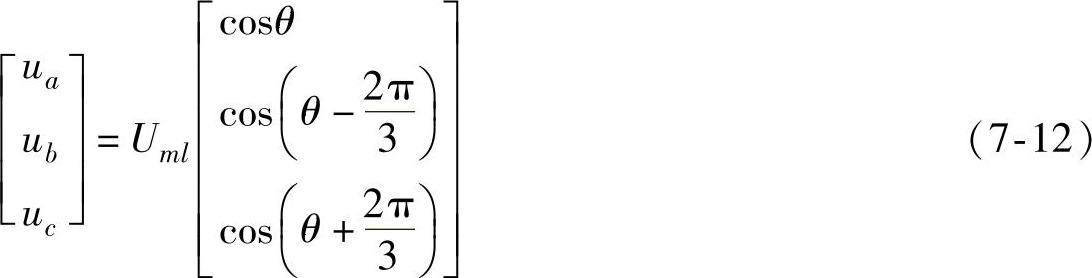
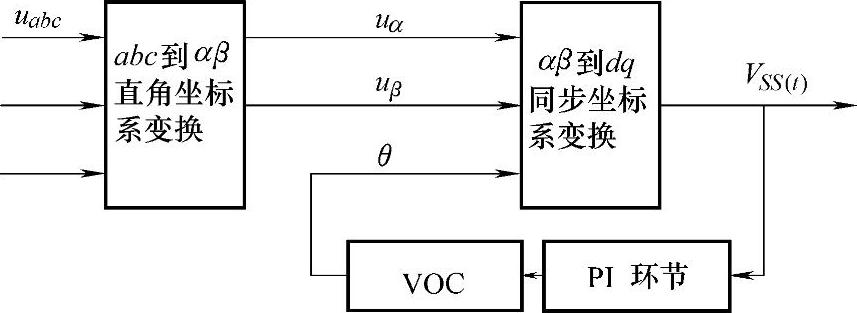
图7-21 SSDC次同步频率变换环节
图7-21中的αβ直角坐标变换关系为[24]

故有
uα=Um1cosθ,uβ=Um1sinθ,θ=ω0t+φ0
式中,ω0为系统基频角频率(rad/s);φ0为母线电压的初始相角(rad/s);Um1为基频电压幅值。
uα、uβ是两相静止坐标系中αβ轴上的电压分量,它们都是时间的周期函数,如果用旋转电压相量 表示,即
表示,即

再进行如式(7-15)的dq变换,

式中, 为电压振荡积分环节VOC的输出量,在稳态时有
为电压振荡积分环节VOC的输出量,在稳态时有 。仅考虑q轴分量为
。仅考虑q轴分量为

输出的uq为误差量e,将作为环路滤波器的输入产生同步相位信号。式(7-16)中假设δ非常小,得到e≈Um1δ,通过合理设计环路滤波器的PI参数,输出 可以跟踪输入a相电压相位θ的变化。
可以跟踪输入a相电压相位θ的变化。
假设三相电压含有谐波,则可以表示为
经过αβ变换后:
再经过dq变换后取q轴分量为

式中,Umn+为谐波次数为n的正序谐波幅值,θn+=nω0t+φn+,φn+为谐波次数为n的正序谐波的初始相角;Unm-为谐波次数为n的负序谐波幅值,θn-=nω0t+φn-,φn-为谐波次数为n的负序谐波的初始相角[15-18]。对于正序次同步频率电压分量,
经上述αβ变换和dq变换后输出所需的次同步频率信号。

通过上述的一系列变换,再经过相位补偿环节的超前滞后相位补偿,可以完全补偿掉由传递函数中TS和I_CLOSE环节引起的不恰当相位变化,最终为待研究的汽轮发电机组提供正的电气阻尼。






相关推荐