【摘要】:改进评价函数进一步优化在前一步的基础上,仍取物距为变量,并将所有半径增加为变量。值得指出的是,往后进一步的优化中,要反复应用这个新构造的评价函数,简称“新构造的评价函数”。第一阶段优化结果的入瞳距离镜头第一面300mm,出瞳距离像面170mm。第一阶段优化出的结构参数见表6-11,简称这个物镜为“光刻物镜6-11”,它的光路简图如图6-22所示。
(1)调整倍数
取物距为变量,将近轴像平面作为像平面;采用默认的弥散圆型式的评价函数,并在其中加入保证横向放大率为-0.25×的操作{PMAG(Wave);Target,Weight}⇒{PMAG(1);-0.25,100},自动优化一次。
(2)改进评价函数进一步优化
在前一步的基础上,仍取物距为变量,并将所有半径增加为变量。仍将近轴像平面作为像平面,在评价函数中增加如下的几个操作:
{DIST(Surf;Wave;Absolute);Target,Weight}⇒{DIST(0;1;0);0,10}
{DIMX(Field;Wave;Absolute);Target,Weight}⇒{DIMX(2;1,0);0,10}
{FCUR(Surf;Wave);Target,Weight}⇒{FCUR(0;1);0,10}
{FCGT(Wave;Hx,Hy);Target,Weight}⇒{FCGT(1;0,1);0,10}
{FCGS(Wave;Hx,Hy);Target,Weight}⇒{FCGS(1;0,1);0,10}
同时在默认评价函数的第2视场中加入下面两个操作:
{TRAC(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAC(1;0,0.7;0,1);0,1}
{TRAC(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAC(1;0,0.7;0,-1);0,1}
在第三视场中加入下面两个操作:
{TRAC(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAC(1;0,1;0,1);0,1}
{TRAC(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAC(1;0,1;0,-1);0,1}
构成新的评价函数后再自动优化一次。值得指出的是,往后进一步的优化中,要反复应用这个新构造的评价函数,简称“新构造的评价函数”。
优化后输出的横向像差曲线、波像差曲线、像散场曲与畸变曲线以及调制传递函数曲线分别如图6-17~图6-20所示。
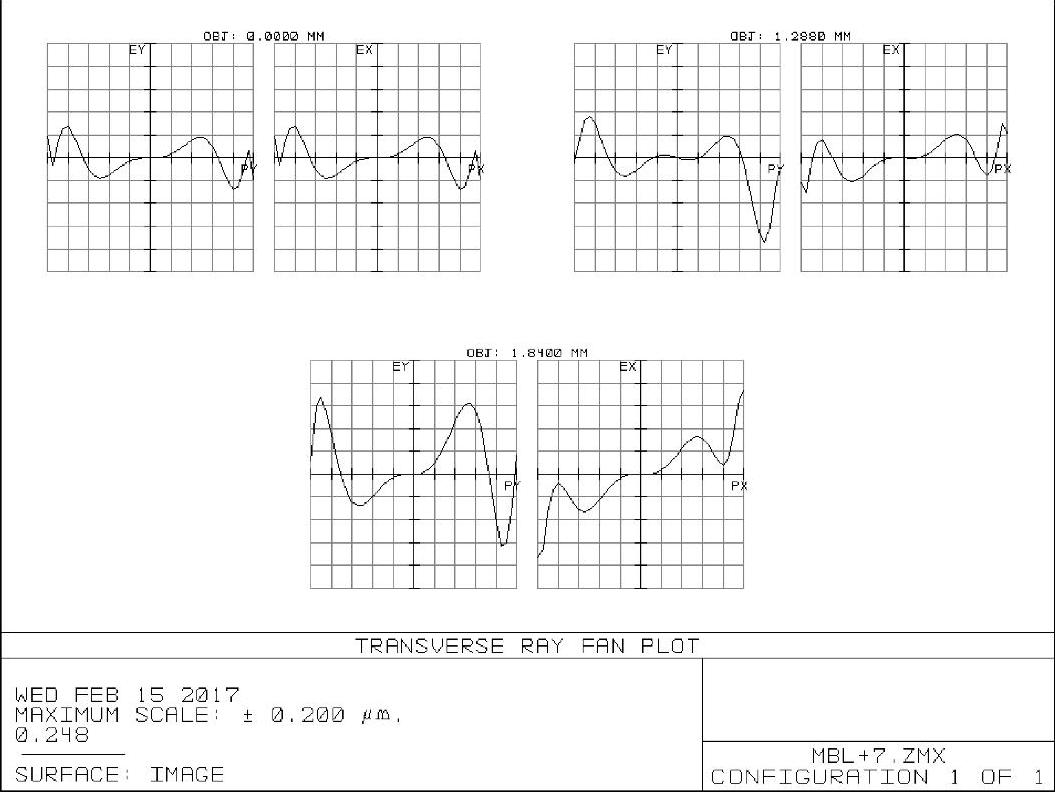
图6-17 光刻物镜的横向像差曲线
(3)调整部分间隔
从像差曲线图上看像质已接近设计要求。但从如图6-21所示的镜头光路图看,有的镜片变尖了,需要增加镜片的厚度;有的间隔太小,两块镜片相碰,需要加大间隔。这要经过若干次的调整,每次调整0.2~0.3mm,然后就用(2)中的变量和“新构造的评价函数”自动优化一次,直到间隔、厚度满足要求,不再违反边界条件。
(4)远心与远心程度
设计任务除对镜头的成像质量提出了要求外,原则上还提出了双远心的要求,这一点在半部设计时就打下了一定的基础,例如将半部的相关焦点挤到半部的外面,以及将半部的孔径光阑移到相关的焦点附近等措施都是为满足双远心要求而做的准备。
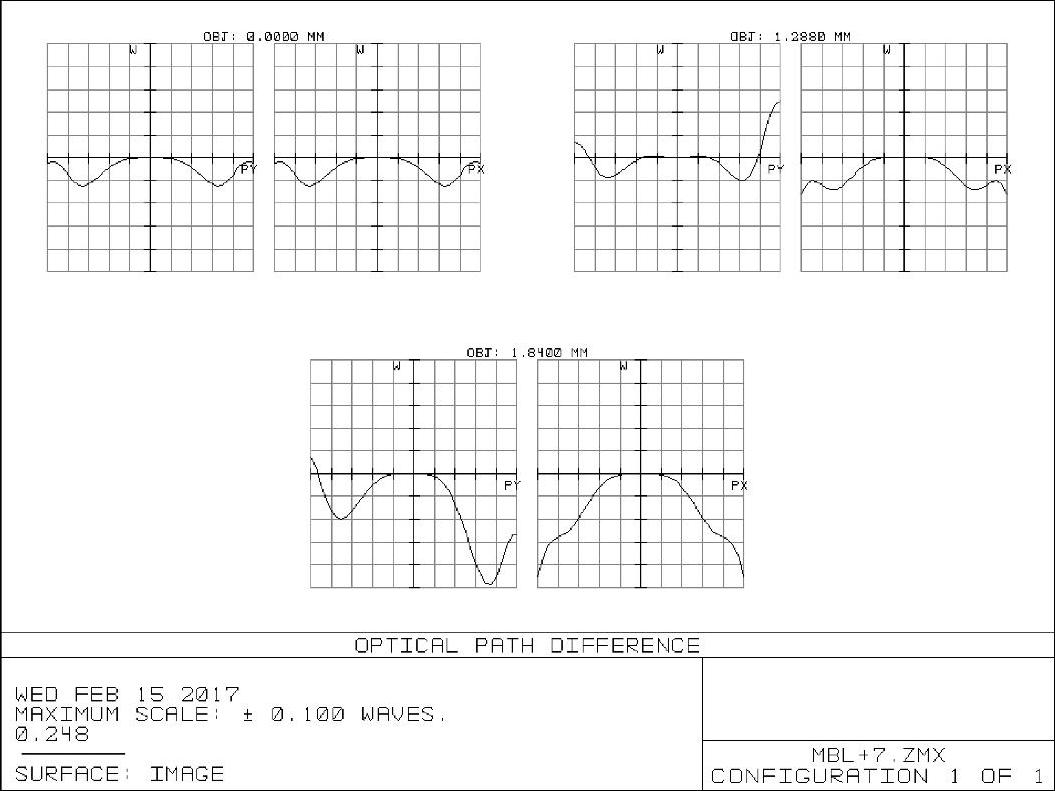
图6-18 光刻物镜的波像差曲线
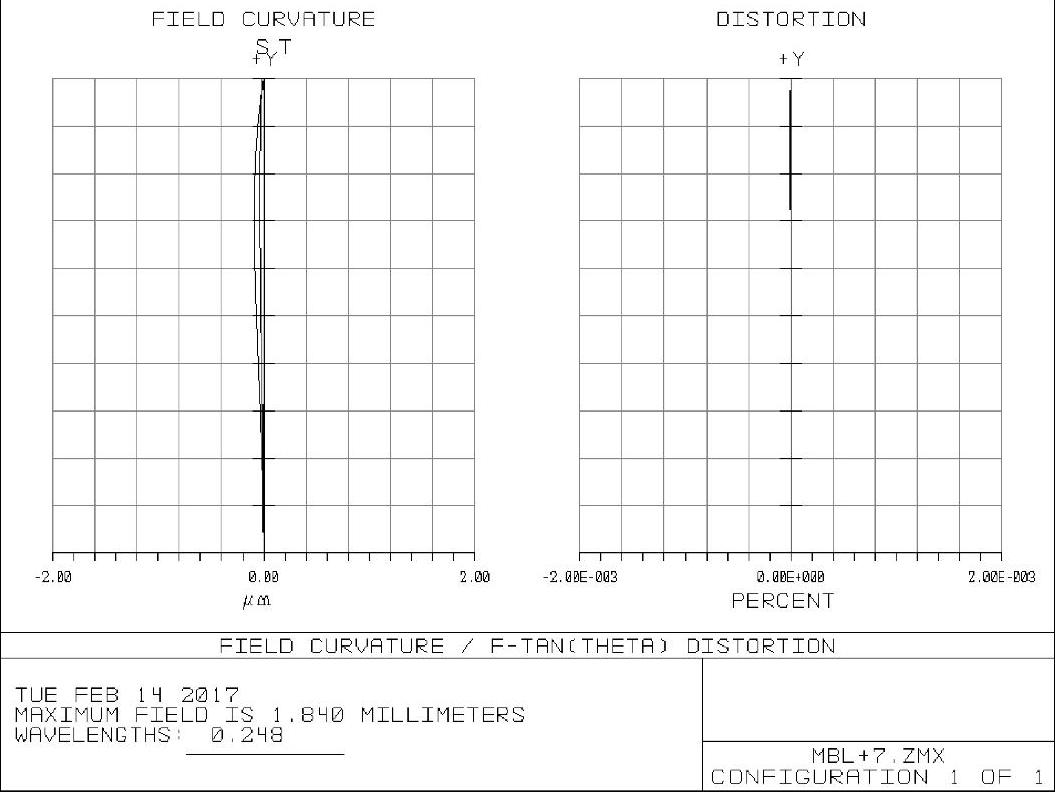
图6-19 光刻物镜的像散场曲和畸变曲线
仅仅就双远心问题来说,解决的办法也似乎很简单。前后两半部合成时,将系统前半部分的像方焦点与后半部分的物方焦点放在一起,并将整个系统的孔径光阑放在这个前、后半部重合的焦平面上,双远心要求即可达到。
但严格满足双远心要求的孔径光阑位置有可能不是系统成像质量最佳的位置,在反复的优化过程中,追求的是像质最优,出瞳和入瞳尽可能处于“远心”。至于衡量入瞳和出瞳趋于“远心”的程度一般以“出瞳距”和“入瞳距”的长短作为一个依据,越远离系统就越满足对远心的要求。应该说,“出瞳距”和“入瞳距”是长还是短只有与相关的焦距相比才比较准确。由于前、后部分系统焦距相差β倍,所以入瞳距与系统孔径光阑前的前半部焦距相比才代表入瞳远心的程度,出瞳距与系统孔径光阑后的后半部焦距相比才代表出瞳远心的程度。
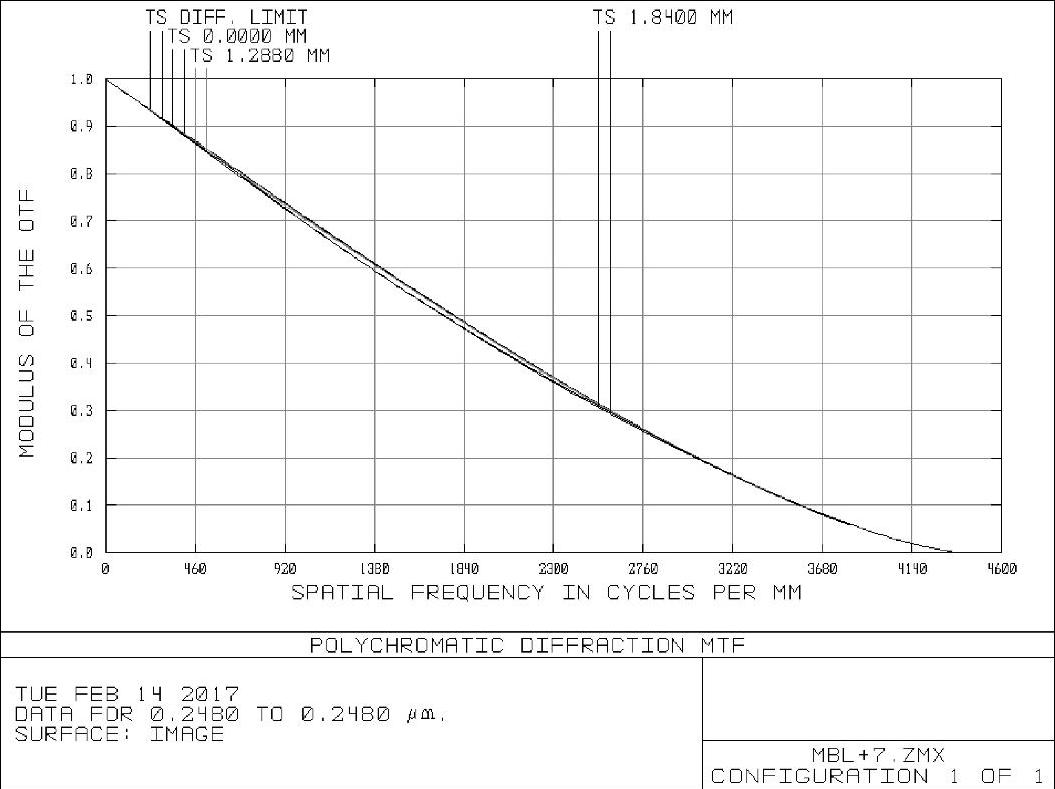
图6-20 光刻物镜的调制传递函数曲线
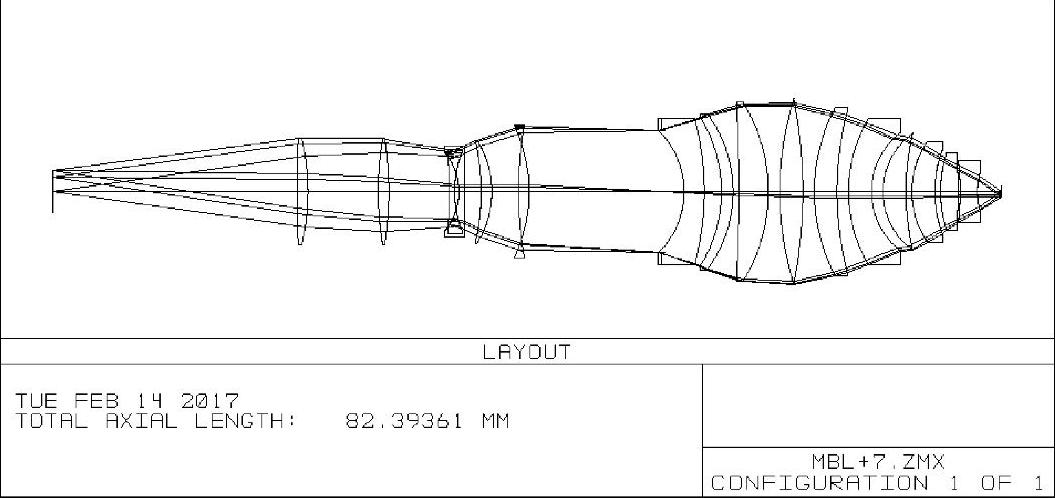
图6-21 光刻物镜的光路图
在光刻物镜系统中,追迹一条最大视场的近轴主光线,这条主光钱在入瞳中心、孔径光阑中心和出瞳中心处的三个“孔径角”分别就是光刻物镜的物方视场角up,光刻物镜的半部视场角ud(即前半部gb或后半部ga的视场角)和光刻物镜的像方视场角up′。
如果入瞳距以物镜前半部的物方焦点为原点,则由牛顿公式形式的横向放大率可得入瞳远心程度就是光刻物镜的半部视场角ud与光刻物镜的物方视场角up之比 。类似,如果出瞳距以物镜后半部的像方焦点为原点,则出瞳远心程度就是光刻物镜的半部视场角ud与光刻物镜的像方视场角up′之比
。类似,如果出瞳距以物镜后半部的像方焦点为原点,则出瞳远心程度就是光刻物镜的半部视场角ud与光刻物镜的像方视场角up′之比 。
。
 的绝对值越大,系统的物方远心程度越好。
的绝对值越大,系统的物方远心程度越好。 的绝对值越大,系统的像方远心程度越好。up、ud和up′可以通过路径analysis→calculation→ray trace→type→Ym,Um;Yc,Uc,在程序输出结果中找到。
的绝对值越大,系统的像方远心程度越好。up、ud和up′可以通过路径analysis→calculation→ray trace→type→Ym,Um;Yc,Uc,在程序输出结果中找到。
对于现在进行的设计,可通过调整孔径光阑前后的空气间隔,使得镜头光路尽可能满足双远心要求。而每做一次调整,就用(2)中的变量和“新构造的评价函数”自动优化一次,将光阑前后间隔变化产生的像差进行再校正。
第一阶段优化结果的入瞳距离镜头第一面300mm,出瞳距离像面170mm。物方视场角up=-0.0057,像方视场角up′=-0.0027,光刻物镜的半部视场角ud=-0.0438。物方远心程度 7.68,像方远心程度
7.68,像方远心程度 ,像方远心程度较物方的好一些。
,像方远心程度较物方的好一些。
第一阶段优化出的结构参数见表6-11,简称这个物镜为“光刻物镜6-11”,它的光路简图如图6-22所示。
表6-11 光刻物镜6-11的结构参数 (l=-23.01mm,u=-0.14,y=1.84mm,β=-0.25)
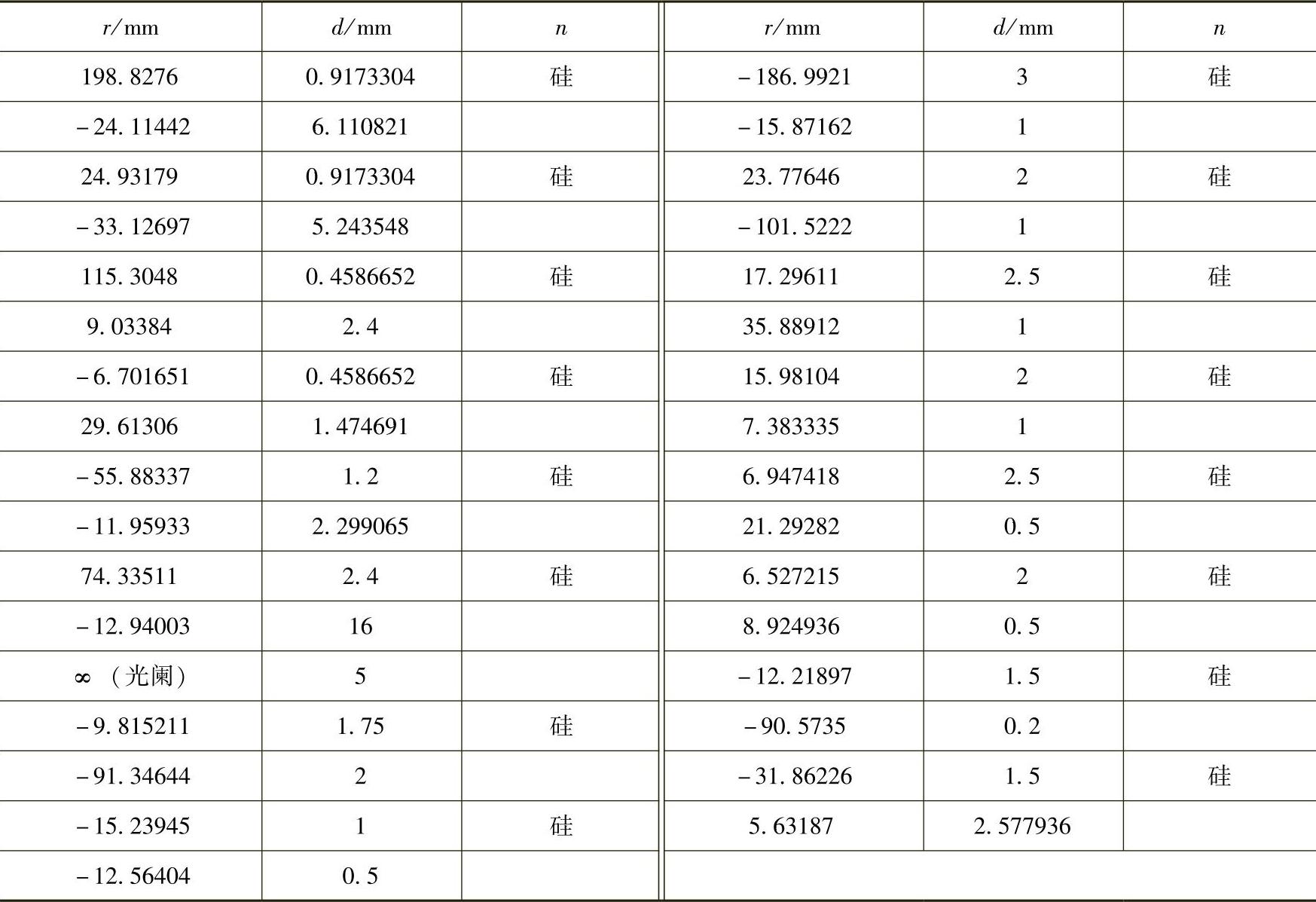
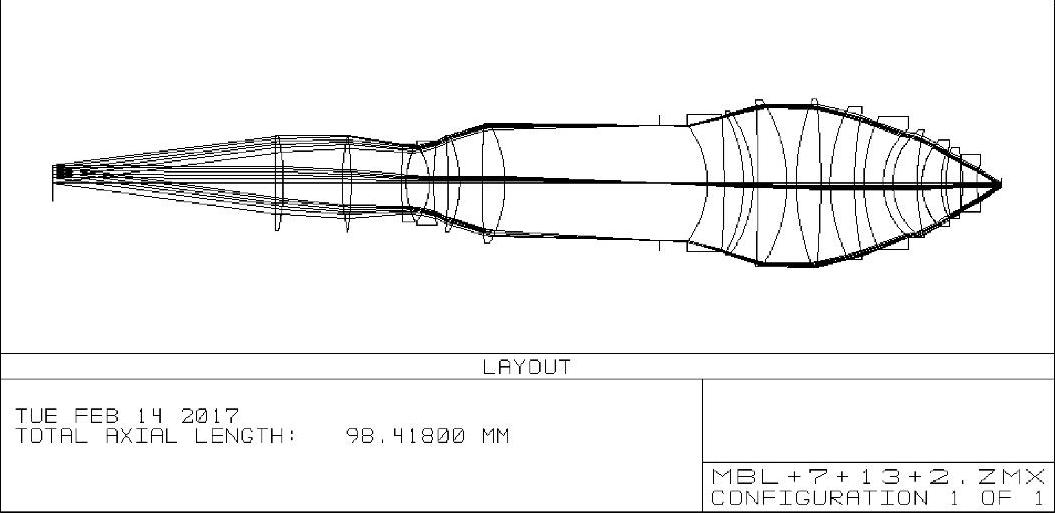
图6-22 光刻物镜6-11的光路简图
取六个视场,即全视场、0.85视场、0.7视场、0.5视场、0.3视场和0视场输出光刻物镜6-11的横向像差曲线和波像差曲线分别如图6-23和图6-24所示,输出像散场曲与畸变曲线和调制传递函数曲线分别如图6-25和图6-26所示。
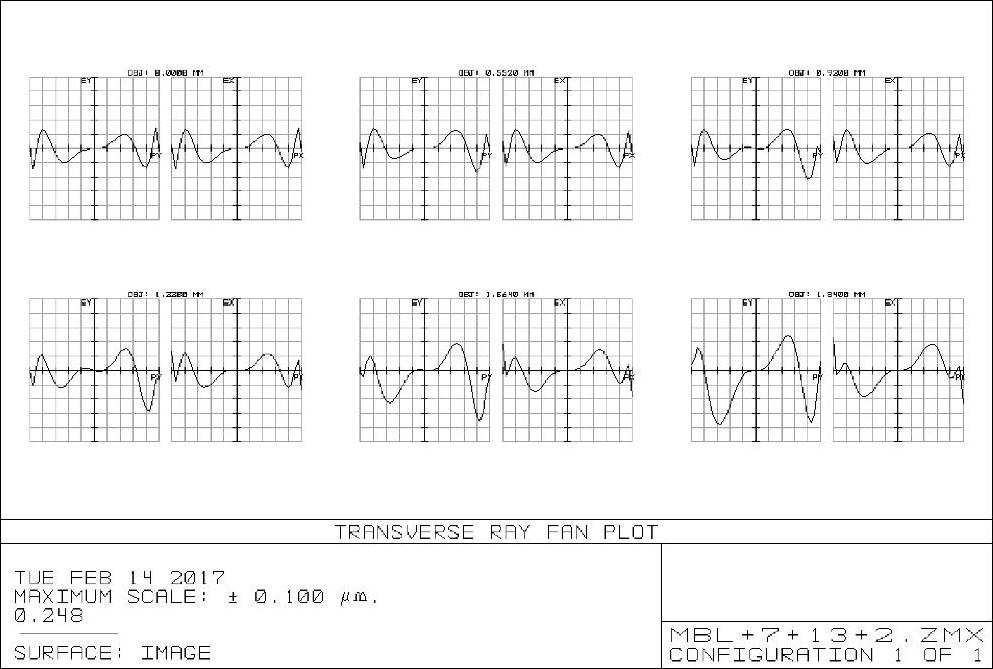
图6-23 光刻物镜6-11的横向像差曲线
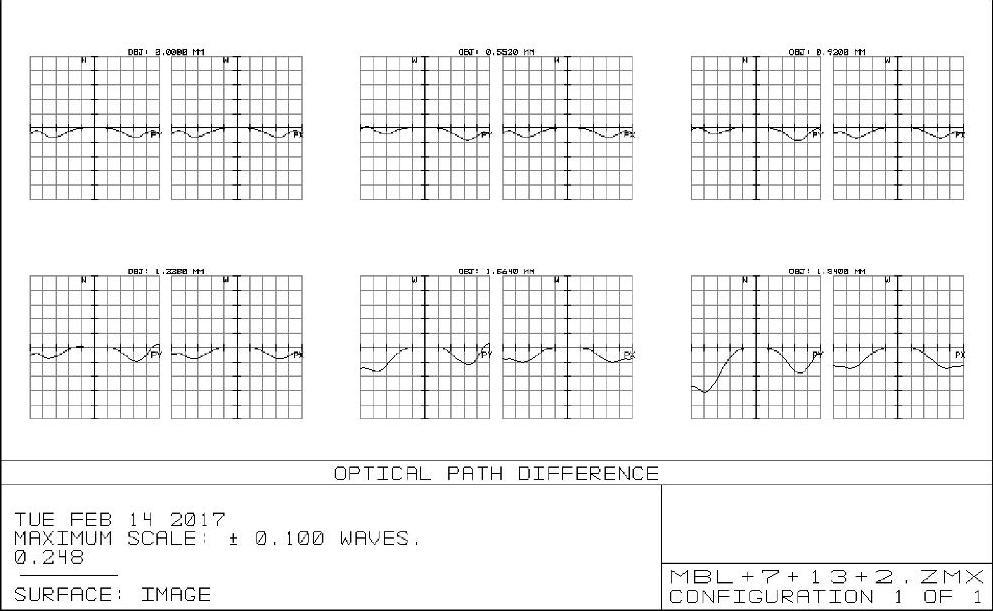
图6-24 光刻物镜6-11的波像差曲线
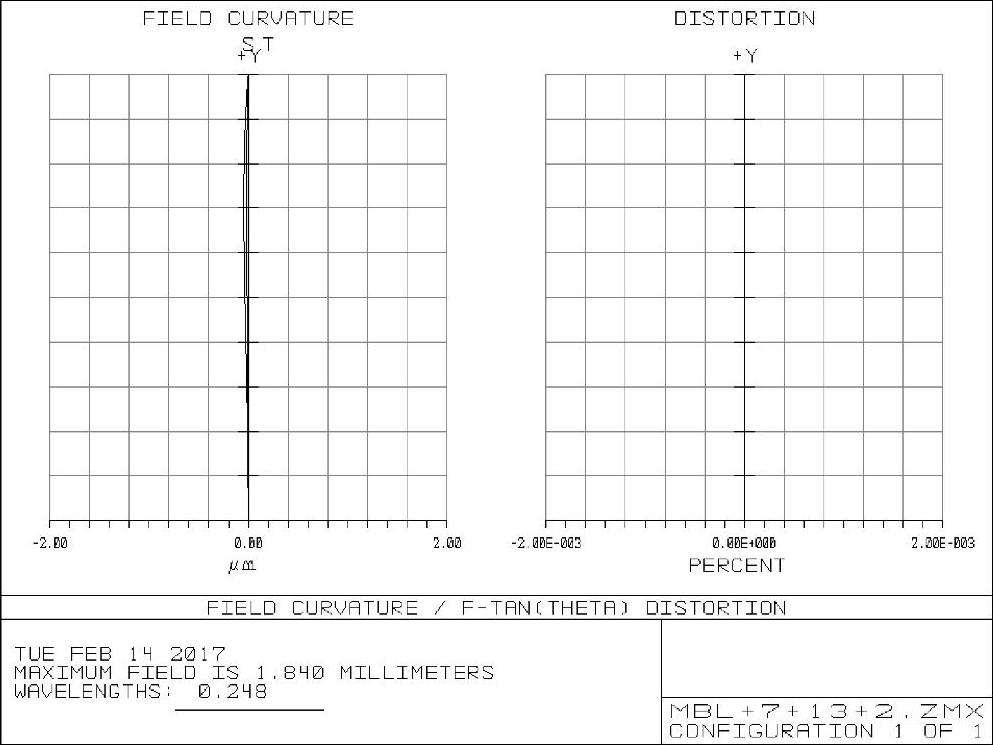
图6-25 光刻物镜6-11的像散场曲和畸变曲线
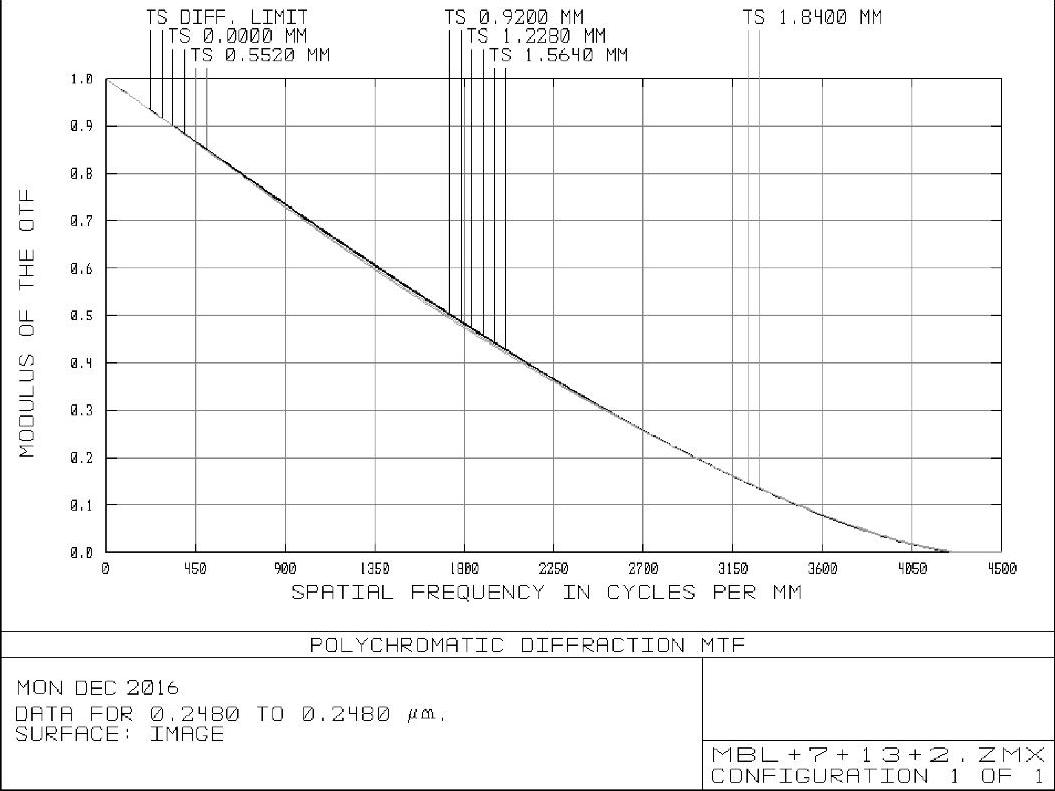
图6-26 光刻物镜6-11的调制传递函数曲线
由光刻物镜6-11的光路简图看,透镜的厚度与空气间隔已调整好;从像差曲线看,这个结果已达到衍射置限水平,畸变也近乎为零。






相关推荐