用导线绕制而成的线圈称为电感器,它是利用电磁感应的原理进行工作的,故又称为电感线圈,简称电感。电感器的主要作用是对交流信号进行隔离、滤波或与电容、电阻等组成谐振电路。图2-19 利用“TRAC”优化出的激光光束聚焦物镜像差曲线图4-58 常见的电感器a)扼流线圈 b)变压器 c)荧光灯镇流器实训与思考17◆拆装如图4-59所示的变压器。金属屏蔽罩是为了防止内、外电路的干扰。......
2023-06-20
前面讨论过的镜头,无论是初始结构还是最后优化好了的结构,基本特点是前组单片是正的光焦度,后组单片是负的光焦度。现采用前组光焦度为负,后组光焦度为正的初始结构进行优化设计。
1.“负前凸”型初始结构
初始结构取前组光焦度为负,后组光焦度为正,前组形状为凸-凹形,且凸面朝向物体的型式,称为“负前凸”型。其初始结构参数见表2-8,初始结构简图如图2-22所示,初始结构的像差曲线如图2-23所示,初始结构的点列图如图2-24所示。
表2-8 激光光束聚焦物镜“负前凸”型的初始结构

表2-8中,前三个折射面半径是初步取定的,第四个折射面半径的数据是由相对孔径 为
为 的要求算出来的。
的要求算出来的。
由像差曲线图2-23和点列图2-24看到,初始结构的像质距离设计要求甚远,需要优化。
2.优化
以表2-8所列作为初始结构参数,取前三个折射面半径、两块镜片之间的空气间隔以及最后一面折射面至像平面间的后工作距作为变量,最后一个折射面半径用于保证镜头的相对孔径。以0.3、0.5、0.7、0.85和全孔径的横向球差“TRAY”构成评价函数,它们的目标值都取0,它们的权重都取1。即采用由如下操作语句括号组成的评价函数:
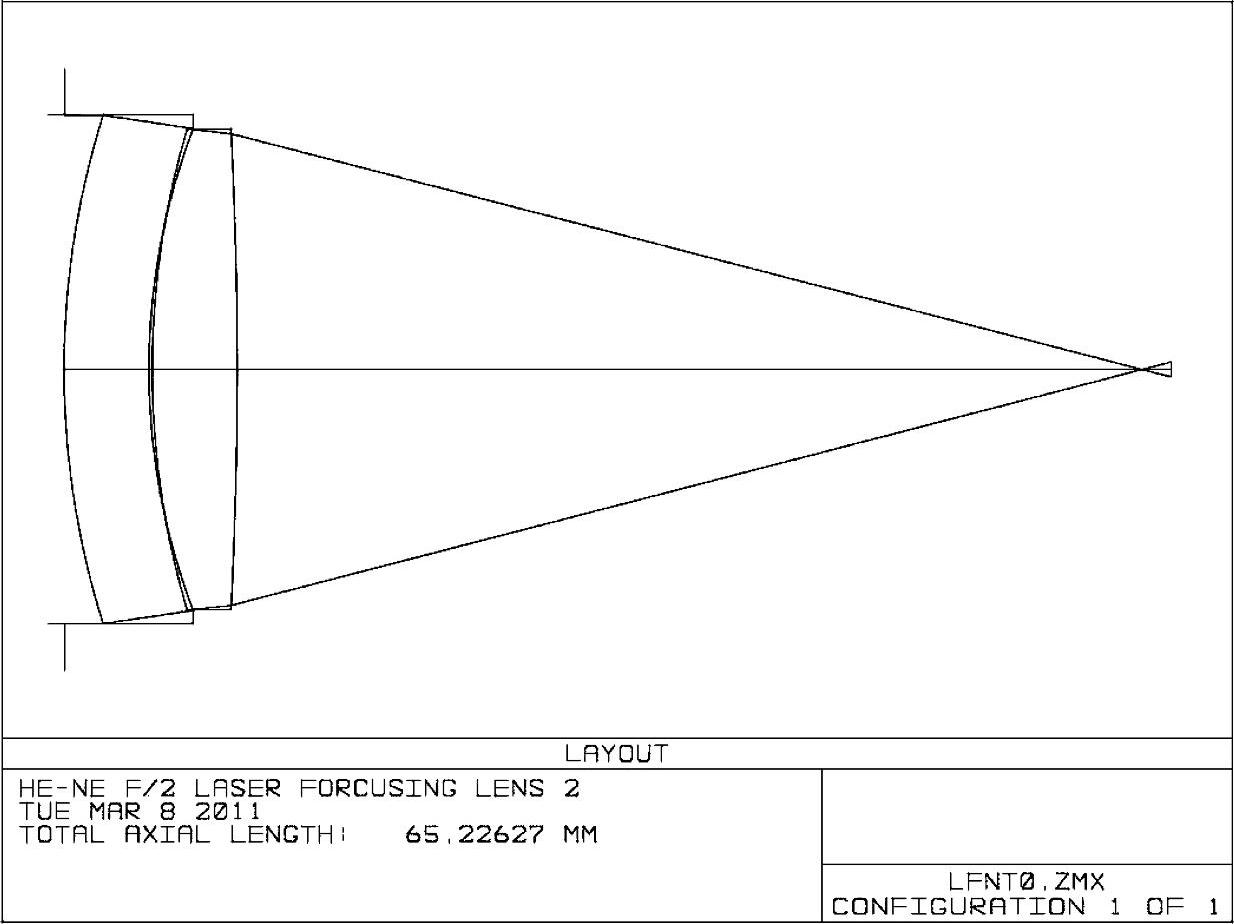
图2-22 “负前凸”型的激光光束聚焦物镜初始结构简图
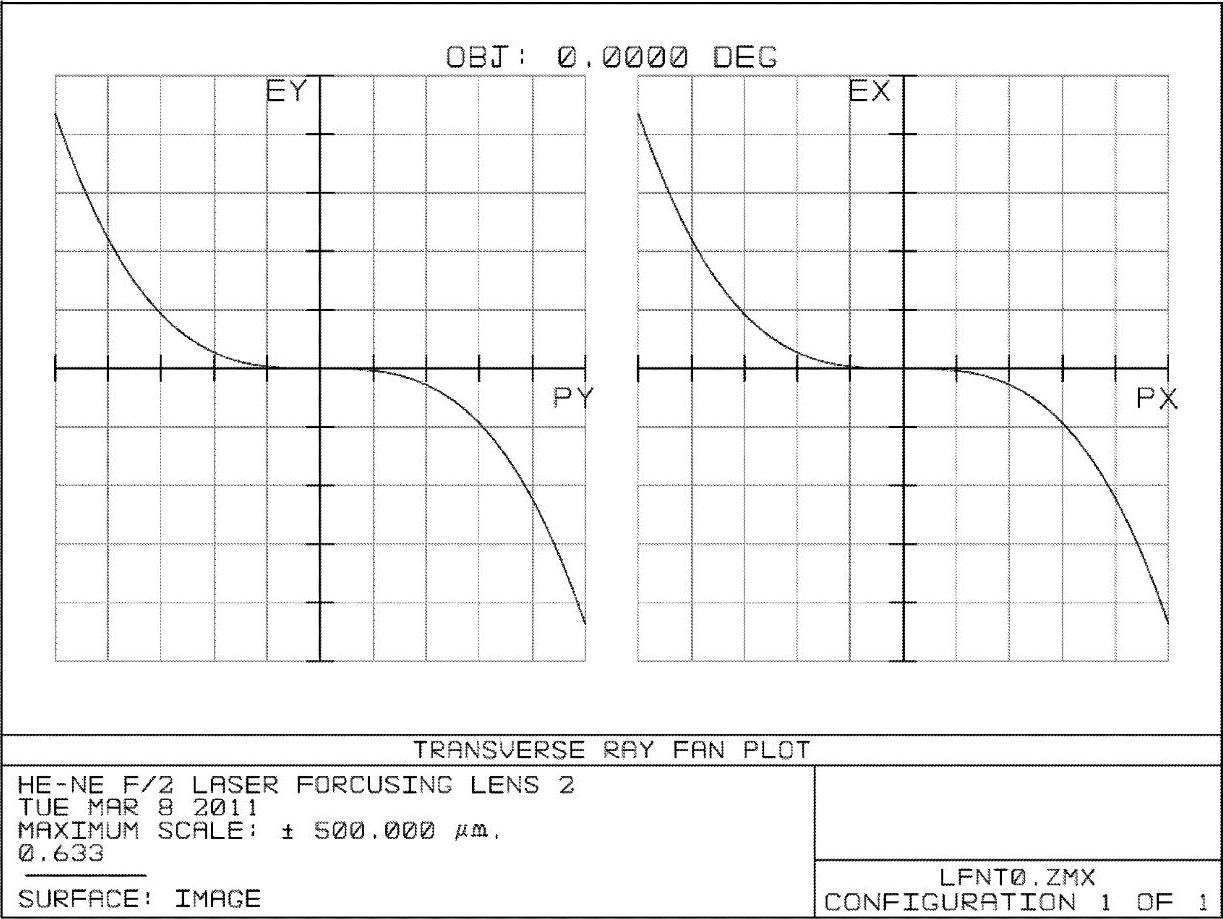
图2-23 “负前凸”型激光光束聚焦物镜初始结构的像差曲线
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.3);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.5);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.7);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.85);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,1);0,1}
图2-24 “负前凸”型激光光束聚焦物镜初始结构的点列图
经优化后,得到的结构参数见表2-9,简称它为“负前凸”型例1。它的结构简图如图2-25所示,优化后得到如图2-26所示的像差曲线、图2-27所示的点列图及图2-28所示的调制传递函数曲线。
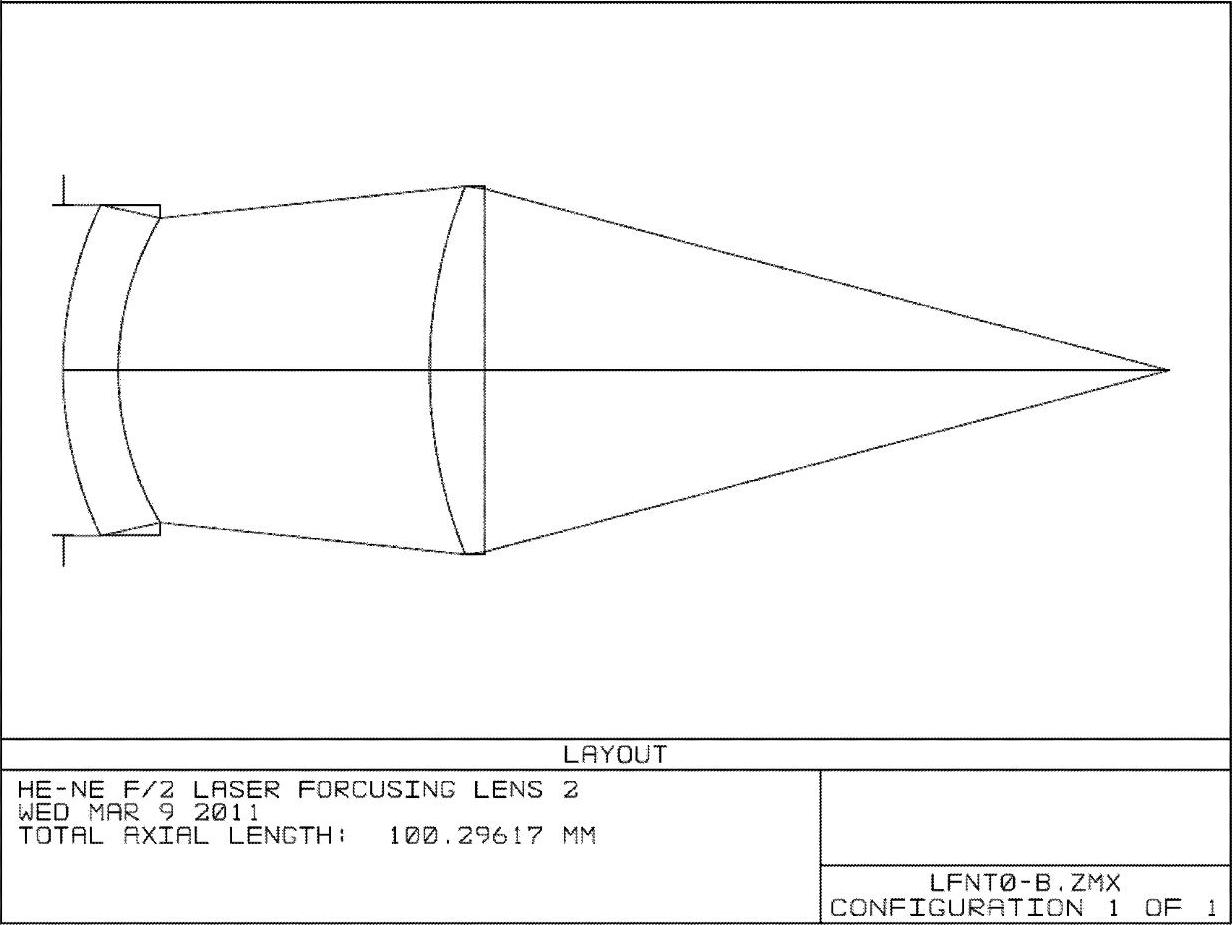
图2-25 “负前凸”型激光光束聚焦物镜例1的结构简图
表2-9 “负前凸”型激光光束聚焦物镜例1结构参数

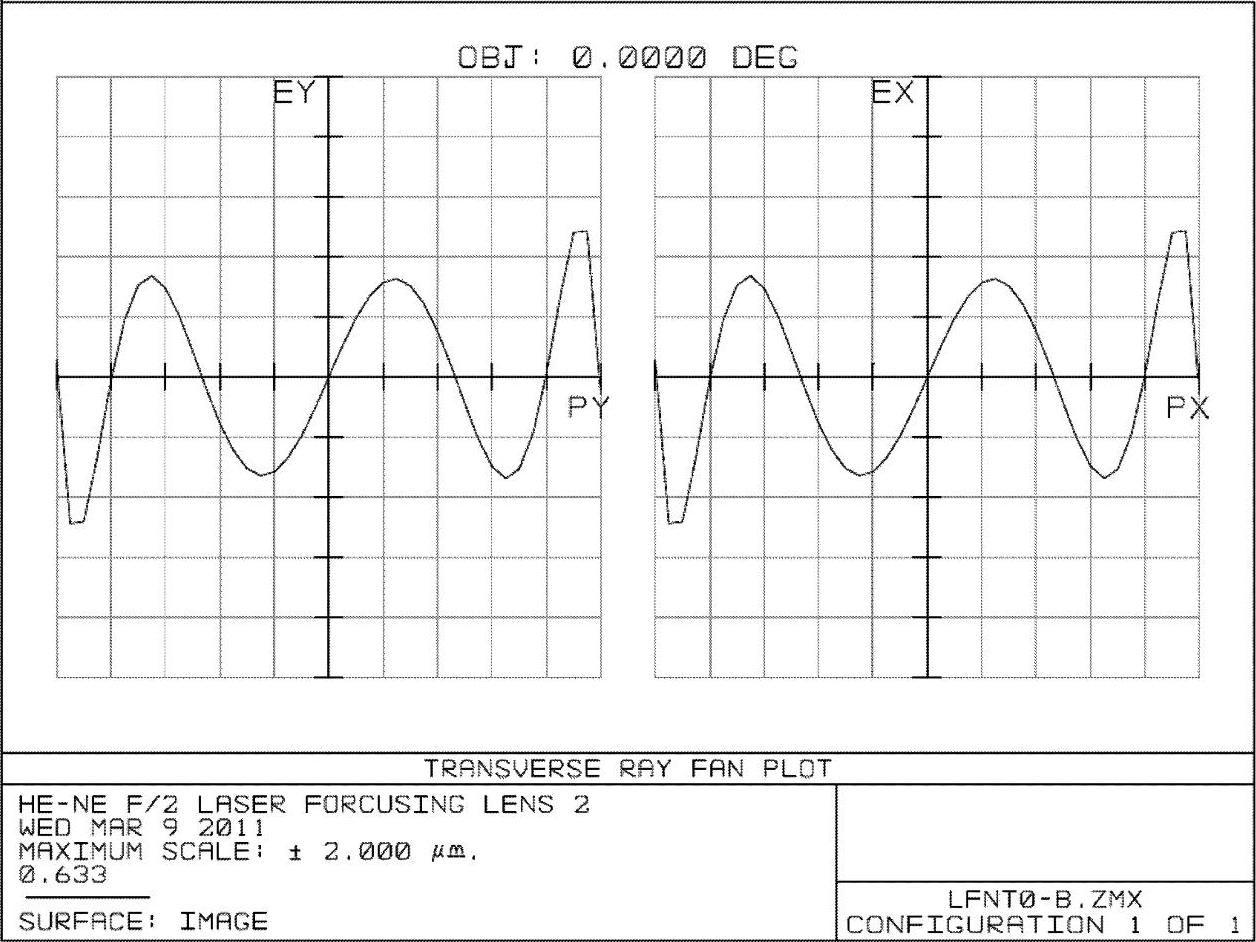
图2-26 “负前凸”型激光光束聚焦物镜例1的像差曲线
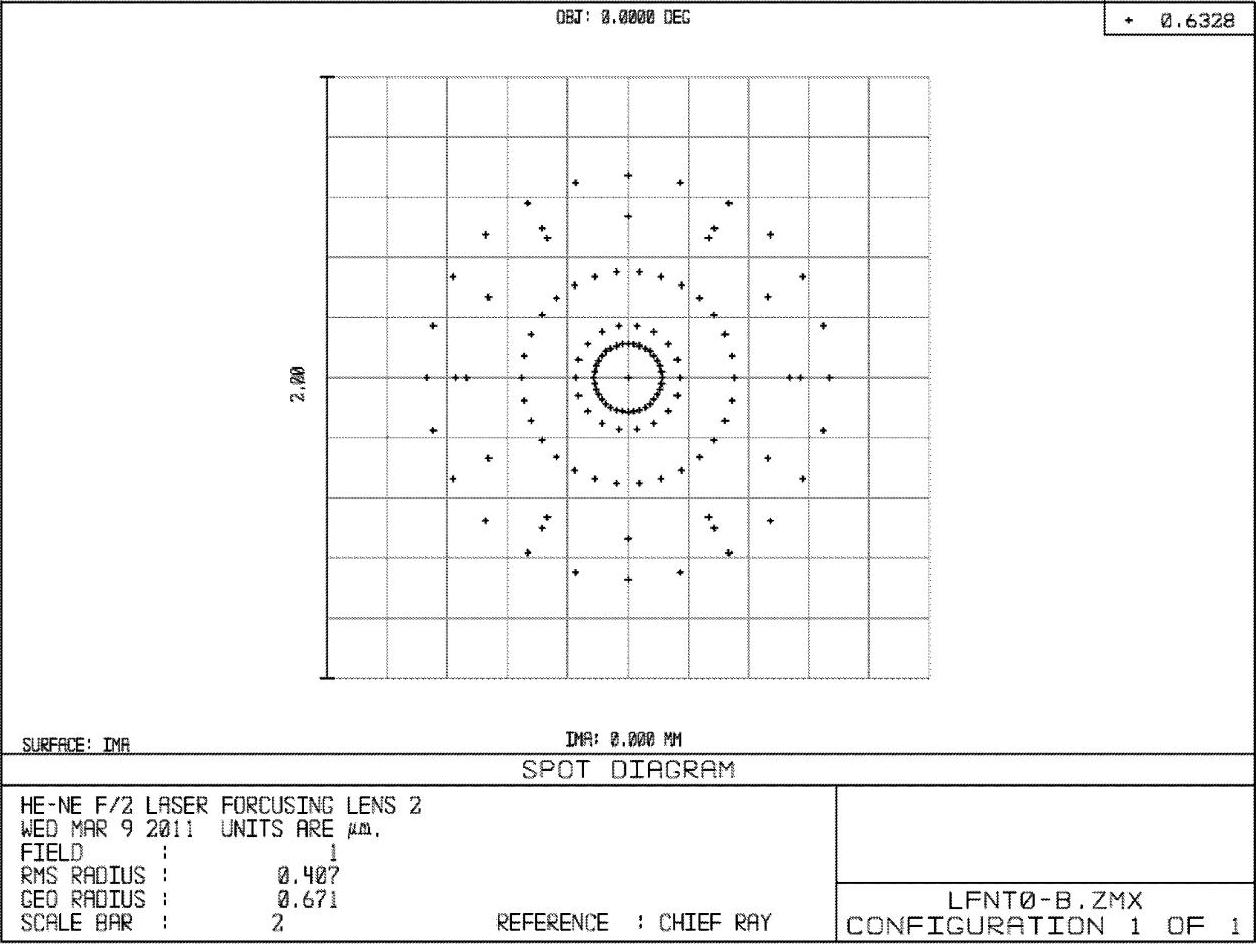
图2-27 “负前凸”型激光光束聚焦物镜例1的点列图
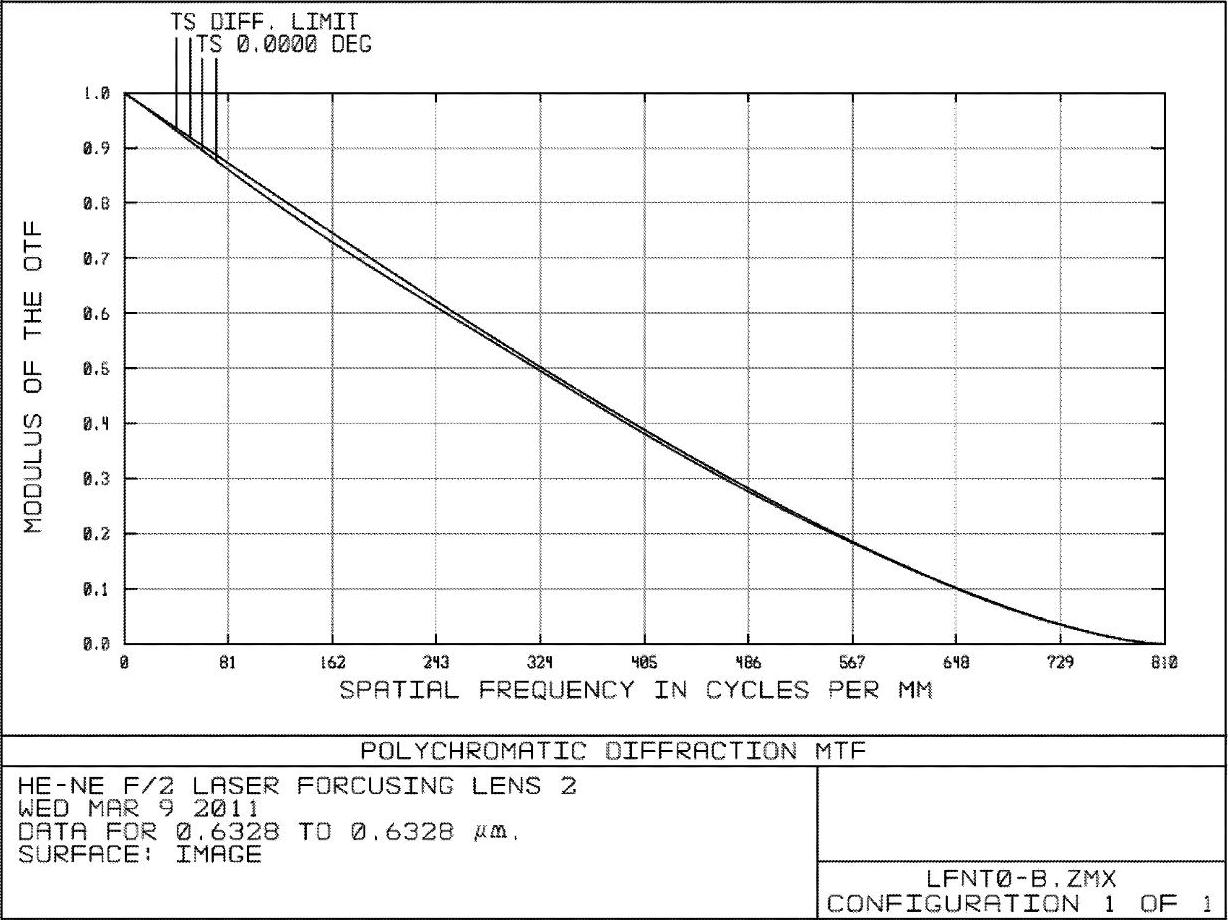
图2-28 “负前凸”型激光光束聚焦物镜例1的调制传递函数曲线
优化结果表明,弥散圆半径小于0.001mm,调制传递函数非常接近理想情况,像质非常优良,远好于设计要求。说明采用不同的初始结构,采用相同的评价函数,也有可能简捷地到达镜头像质较佳的位置。
优化后,虽然像质已经达到要求,但由表2-9知,“负前凸”型例1这个系统,由光阑面至像平面的距离,即系统的长度为100.3mm,而表2-5所列的系统长度仅是57.2mm,这比表2-5所列的系统长了43.1mm,需要做进一步的改进。
3.改进
以表2-8所列作为初始结构参数,取前三个折射面的半径、两块镜片间的空气间隔以及后工作距作为变量,最后一个折射面半径用于保证镜头的相对孔径;仍以0.3、0.5、0.7、0.85和全孔径的横向球差“TRAY”构成评价函数,它们的目标值仍然都取0,它们的权重仍然都取1。
对两块镜片间的空气间隔施加边界条件,试探性地将空气间隔的变动范围限制在0~10mm之间。显然,增加这个边界条件的意图是缩短空气间隔,从而缩短整个系统的总长度。在ZEM-AX程序中,对空气间隔之类的厚度施加限制的办法是将“MXCT”类的操作数加入到评价函数中。这里“MXCT”的含义是间隔厚度的最大值,其下要指明是从第几面到第几面的间隔,在目前设计的这个镜头中,是从第三面到第四面的空气间隔,它的目标值试探性地定为10,即限制这个间隔最大不能超过10mm,它的权重取1。将这个边界条件加入到评价函数中,采用由如下操作语句括号组成的评价函数:
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.3);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.5);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.7);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.85);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,1);0,1}
{MXCT(Surf1,Surf2);Target,Weight}⇒{MXCT(3,4);10,1}
优化后,得到结构参数见表2-10,这个结果的系统长度是78.5mm,比“负前凸”型例1缩短了近22mm。称这个结果为“负前凸”型例2。它的结构简图如图2-29所示,其像差曲线如图2-30所示,点列图如图2-31所示,调制传递函数曲线如图2-32所示。
表2-10 “负前凸”型激光光束聚焦物镜例2的结构参数

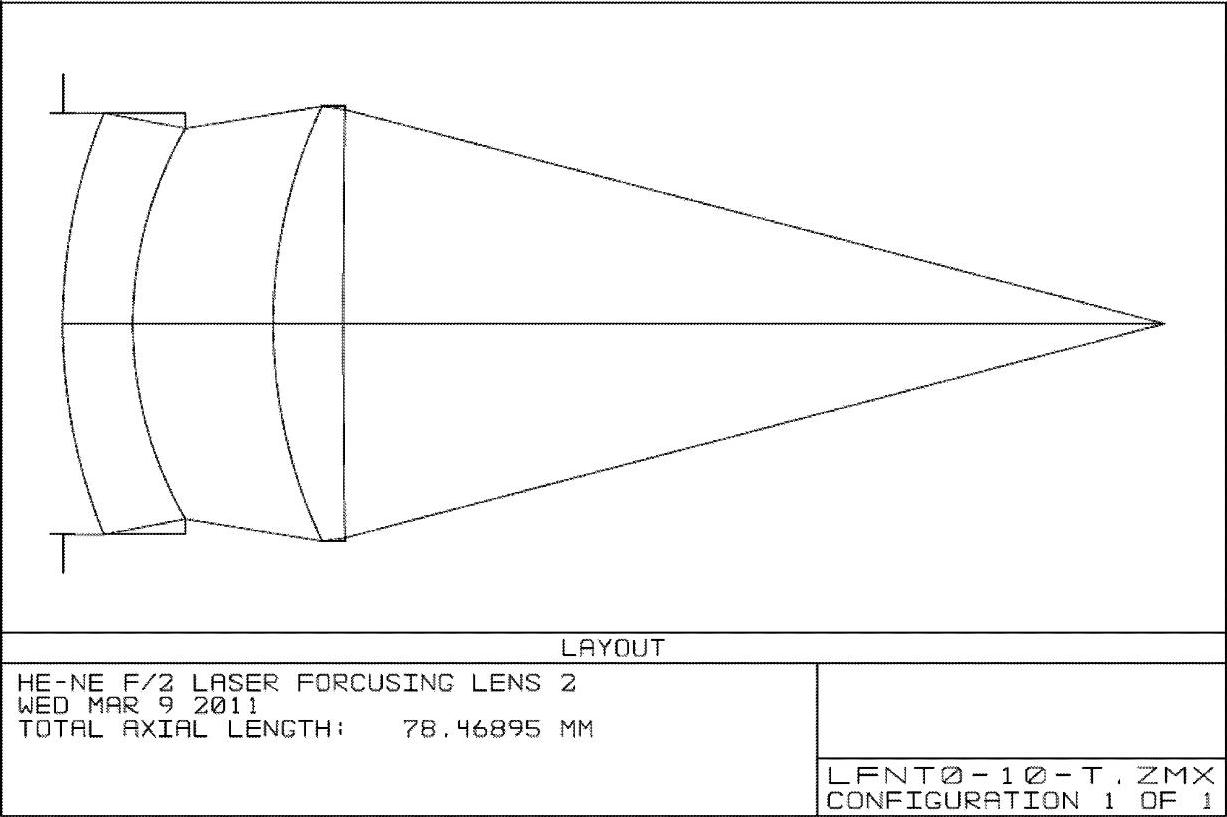
图2-29 “负前凸”型激光光束聚焦物镜例2的结构简图
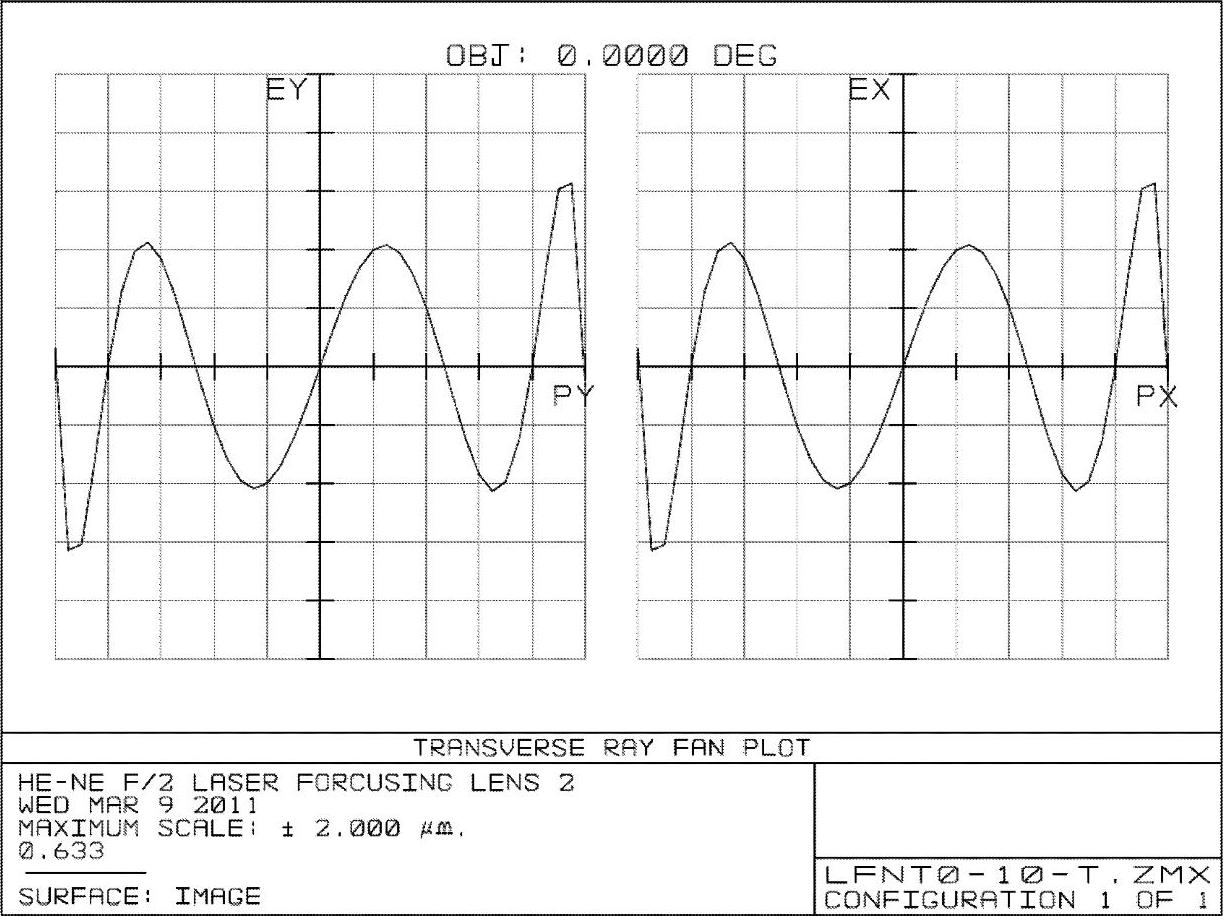
图2-30 “负前凸”型激光光束聚焦物镜例2的像差曲线
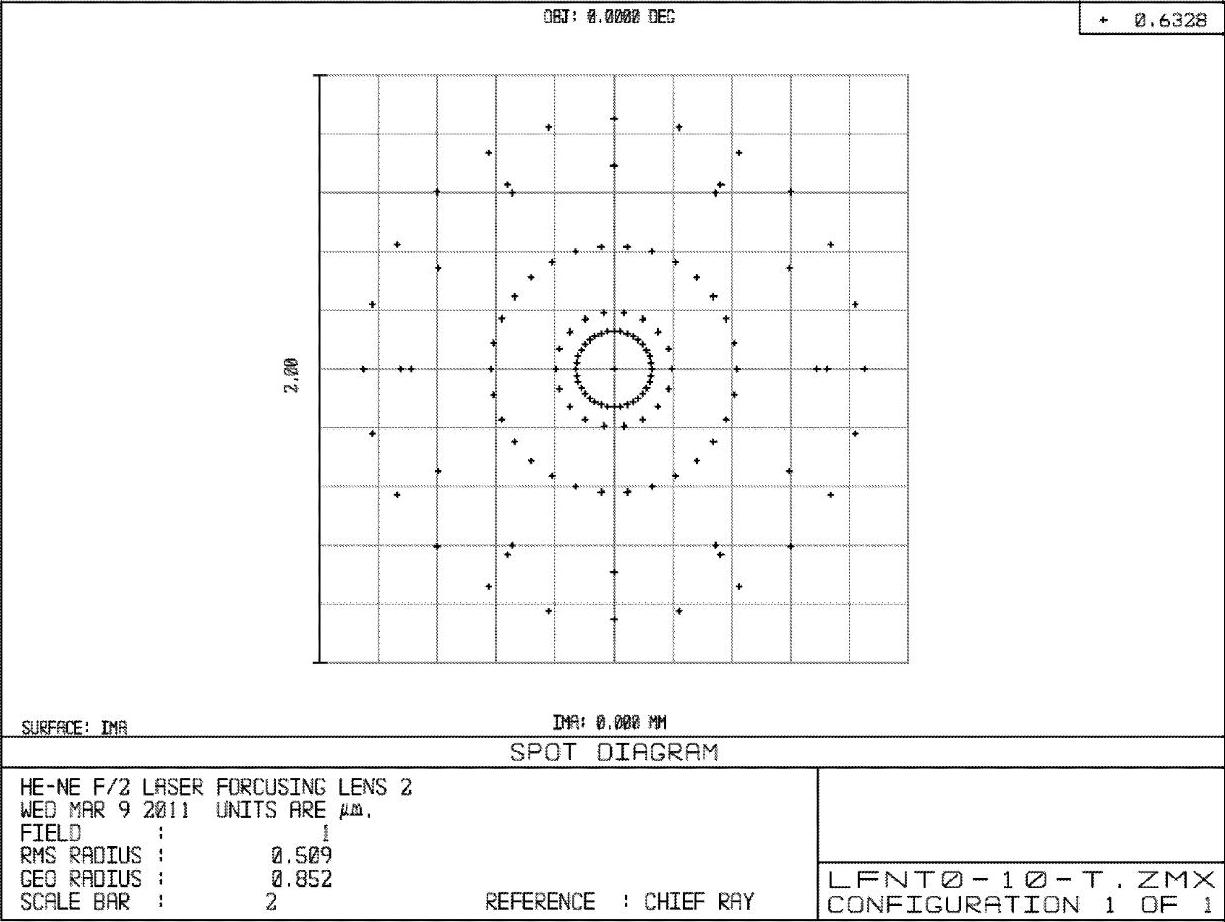
图2-31 “负前凸”型激光光束聚焦物镜例2的点列图
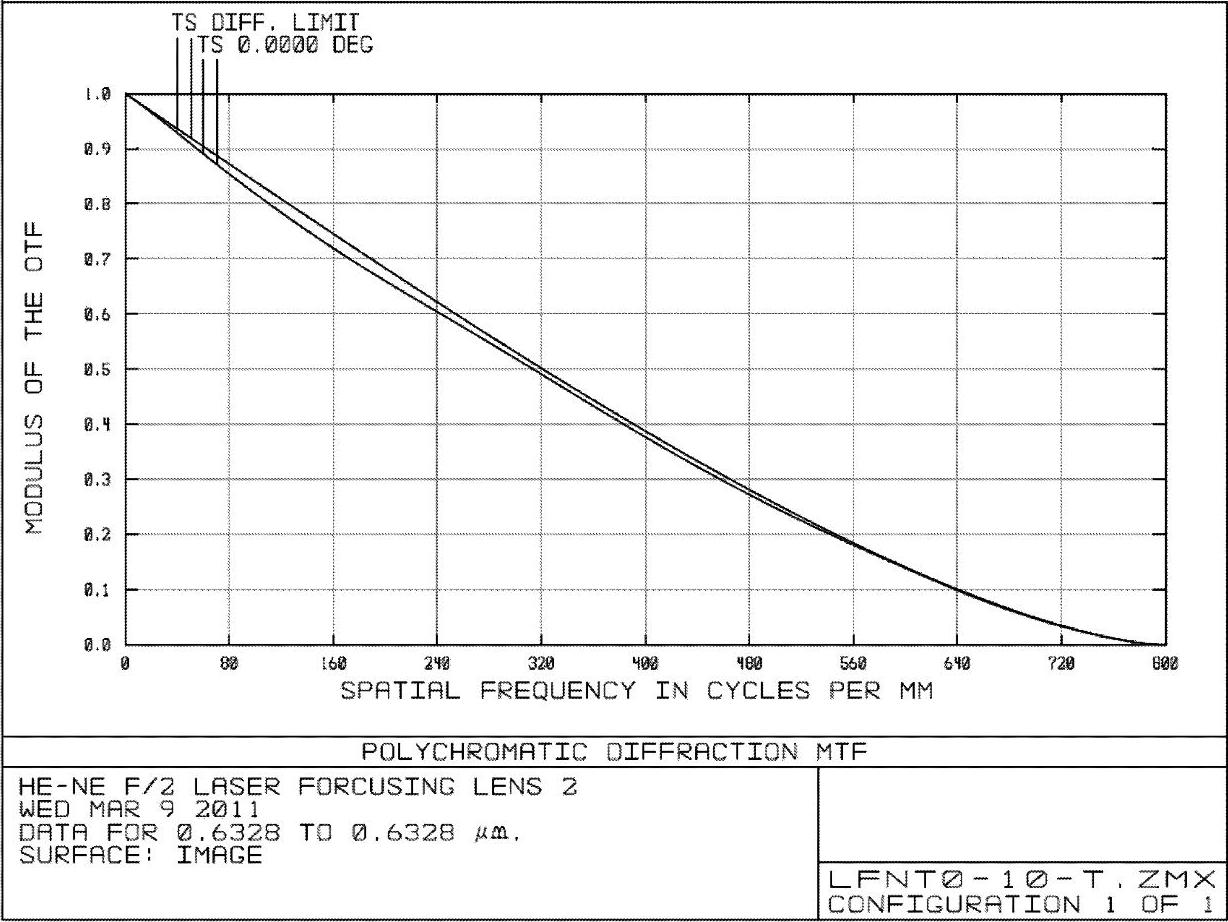
图2-32 “负前凸”型激光光束聚焦物镜例2的调制传递函数曲线
“负前凸”型例2与例1的像质都很优良,但“负前凸”型例2的系统长度比例1的缩短了。事实上,当这个系统两块镜片间的空气间隔缩短至8mm时,还可以优化出像质优良的系统,这时系统总长可缩短至75.9mm。
有关现代光学镜头设计方法与实例的文章

用导线绕制而成的线圈称为电感器,它是利用电磁感应的原理进行工作的,故又称为电感线圈,简称电感。电感器的主要作用是对交流信号进行隔离、滤波或与电容、电阻等组成谐振电路。图2-19 利用“TRAC”优化出的激光光束聚焦物镜像差曲线图4-58 常见的电感器a)扼流线圈 b)变压器 c)荧光灯镇流器实训与思考17◆拆装如图4-59所示的变压器。金属屏蔽罩是为了防止内、外电路的干扰。......
2023-06-20

第5章中将4~6片透镜组成的镜头定义为中等复杂的光学镜头,现将由6片以上透镜组成的镜头划归为复杂镜头,即称结构比双高斯摄影物镜更复杂的镜头为复杂镜头。集成电路加工设备中的投影光刻机物镜就是一个复杂的光学镜头,一般它由十几块乃至几十块镜片组成。本章将一个工作在紫外波段的投影光刻物镜作为复杂镜头的设计实例,从构造初始结构开始一步一步完整地完成设计。6)双远心光路。......
2023-06-20
我们研制开发的角柱形瓦楞套箱,有效提高了纸箱的抗压强度,在减少资源消耗的同时,大大降低了生产成本。本节介绍的角柱型瓦楞纸套箱结构是重型包装的一个新方向,其抗压强度是相同尺寸与材质的0201型普通纸箱的2倍左右,在高温高湿等恶劣条件下,纸箱的抗压强度下降较少,具有明显的耐压优势。图1-6-8套箱高度对抗压强度影响角柱型瓦楞托盘套箱(大尺寸)的抗压强度针对大尺寸角柱型瓦楞纸箱,研究角柱型对纸箱抗压强度的影响。......
2023-06-27

加强肋是指塑件上长的凸起物,用来改善制件的强度和刚度。有的加强肋还能改善成型时熔体的流动状况,增加流程的截面积,缩短流程。塑料制件的加强肋和凸台如图313所示。图312 塑件圆角半径的确定图313 塑料制件的加强肋和凸台图314 塑料制件加强肋形状和尺寸加强肋在布置时有以下要求。在长形或深形箱体的转角处设置加强肋,能有效地克服翘曲变形现象。加强肋的端面应低于塑料制件支承面0.05~1mm。......
2023-06-30

复杂的PCB一般适用于大型集成电路设计,有专用的一些样板模型,可以通过DXP的PCB向导编辑器来创建,下面介绍一个例子。图6-10 “PCB尺寸单位”对话框单击“Next”按钮即可进入板型选择询问对话框,如图6-11所示。如果需要奇数板层,可以直接编辑对应数字,需要说明的是,双层板就是信号层为2和电源层是0的PCB。图6-16 完成PCB定型图6-17 刚刚创建的PCB......
2023-06-23

为寻找更为理想的基窗函数,借助LMS算法思想提出了“基于LMS准则以apSW为模型的基窗函数设计方法”。图3-21 余弦基神经自适应网络图3-21 余弦基神经自适应网络图3-22 apSW基窗LMS设计算法按照流程图,设计截止频率为π/4的32阶低通apSW的窗函数F。......
2023-06-23
完成整体网格的划分并检查没有错误后,就可以把ICEM中导出的.cfx5文件导入CFX中,可以进一步检查几何体网格的划分正确与否。方法如下:1.导入网格文件1)选择→→→→,打开软件以后,首先定义工作目录,然后打开前处理组件,操作如图4.2-46所示。图4.2-46 前处理选项图4.2-47 前处理选择对话框4)全部导入网格后,网格的装配图如图4.2-48所示。图4.2-48 网格装配图4.2-49 命名域窗口2.生成域导入网格成功后,需要对输入的网格定义流动域和边界条件,操作如下。......
2023-06-26

本文所倡导的创业型大学学科发展模式,就是将学科融入学院实体组织中,而不是在学院建设之外重建实体性的学科组织。具体而言,当前创业型大学激活学科,应该关注以下几点。因此,创业型大学的学科建设,既高于学院架构,又植根二级学院。......
2023-10-05
相关推荐