解:1)自感电动势为图2-31 “负前凸”型激光光束聚焦物镜例2的点列图负号表示自感电动势总是企图阻碍电流的变化。求自感电动势时可取绝对值,即图2-32 “负前凸”型激光光束聚焦物镜例2的调制传递函数曲线“负前凸”型例2与例1的像质都很优良,但“负前凸”型例2的系统长度比例1的缩短了。......
2023-06-20
1.“正前凸”型初始结构
“正前凸”型双片初始结构参数见表2-3,初始结构简图如图2-5所示,像差曲线和点列图分别如图2-6和图2-7所示。
表2-3 激光光束聚焦物镜“正前凸”型双片初始结构参数

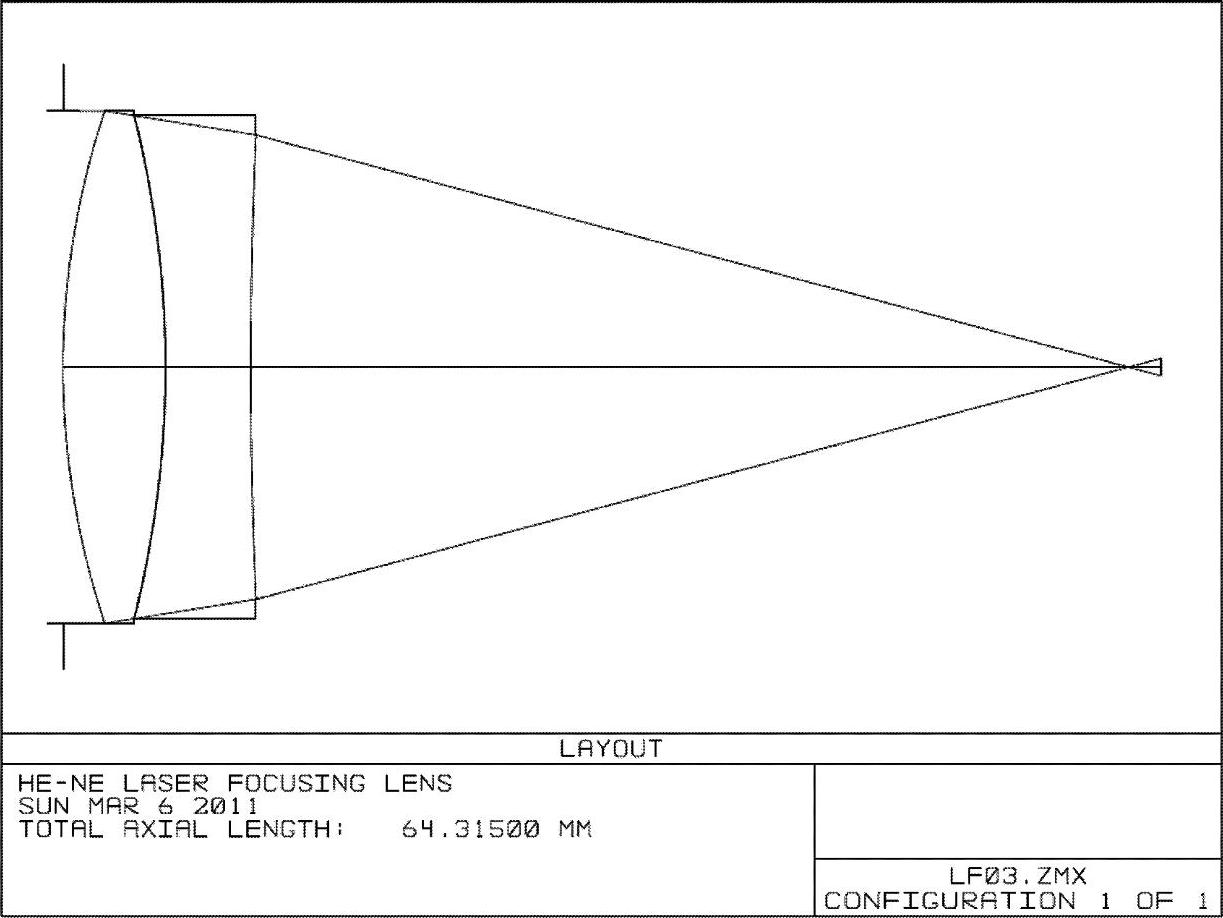
图2-5 激光光束聚焦物镜“正前凸”型初始结构简图
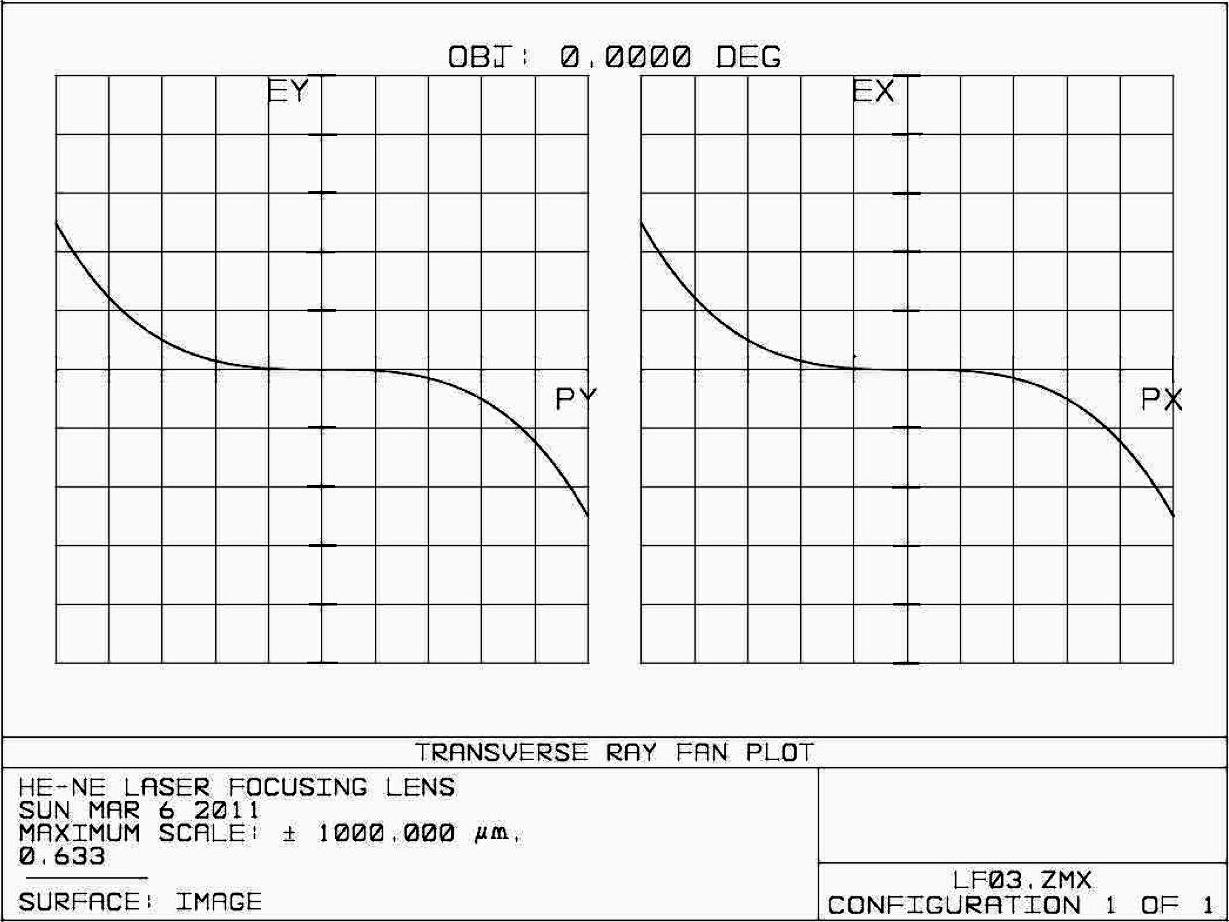
图2-6 激光光束聚焦物镜“正前凸”型初始结构的像差曲线

图2-7 激光光束聚焦物镜“正前凸”型初始结构的点列图
表2-3中,前三个半径是初步取定的,第四个半径的数据是由相对孔径 的要求算出来的。构造的初步想法是以表2-2所列单片为基础,中间划出一个半径为-60mm的球面将单片分成双片,并取两片的厚度分别为6mm和5mm,并令最后一面保证物镜的相对孔径。
的要求算出来的。构造的初步想法是以表2-2所列单片为基础,中间划出一个半径为-60mm的球面将单片分成双片,并取两片的厚度分别为6mm和5mm,并令最后一面保证物镜的相对孔径。
值得指出,当镜头的入瞳直径为30mm时,取镜头的相对孔径 就意味着镜头的焦距为60mm。
就意味着镜头的焦距为60mm。
细心的读者看到,这个“正前凸”型双片初始结构的像差曲线和点列图几乎与高折射率单片的完全相同,这不奇怪,现在的双片本质上与单片是一回事,差别仅在中心厚度上。
2.优化
(1)第1步优化 令透镜的前三个折射面半径作变量,第四个折射面半径用以保证物镜的相对孔径 ,并令两块透镜间的空气间隔作为变量;将0.3、0.5、0.7、0.85和全孔径的横向球差“TRAY”加入到评价函数中,它们的目标值都取0,权重都取1。即采用由如下操作语句括号组成的评价函数:
,并令两块透镜间的空气间隔作为变量;将0.3、0.5、0.7、0.85和全孔径的横向球差“TRAY”加入到评价函数中,它们的目标值都取0,权重都取1。即采用由如下操作语句括号组成的评价函数:
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.3);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.5);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.7);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.85);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,1);0,1}
将单片分裂成双片,目的是减小每个折射面承担的孔径,以减小每个折射面产生的球差;将两块透镜间的空气间隔作为变量,就是为产生用于减小各级球差并让各级球差能达到合理平衡的内因。第1步优化`出的结构参数见表2-4,第1步优化出的像差曲线和点列图分别如图2-8和图2-9所示。
表2-4 第1步优化出的激光光束聚焦物镜“正前凸”型双片结构参数

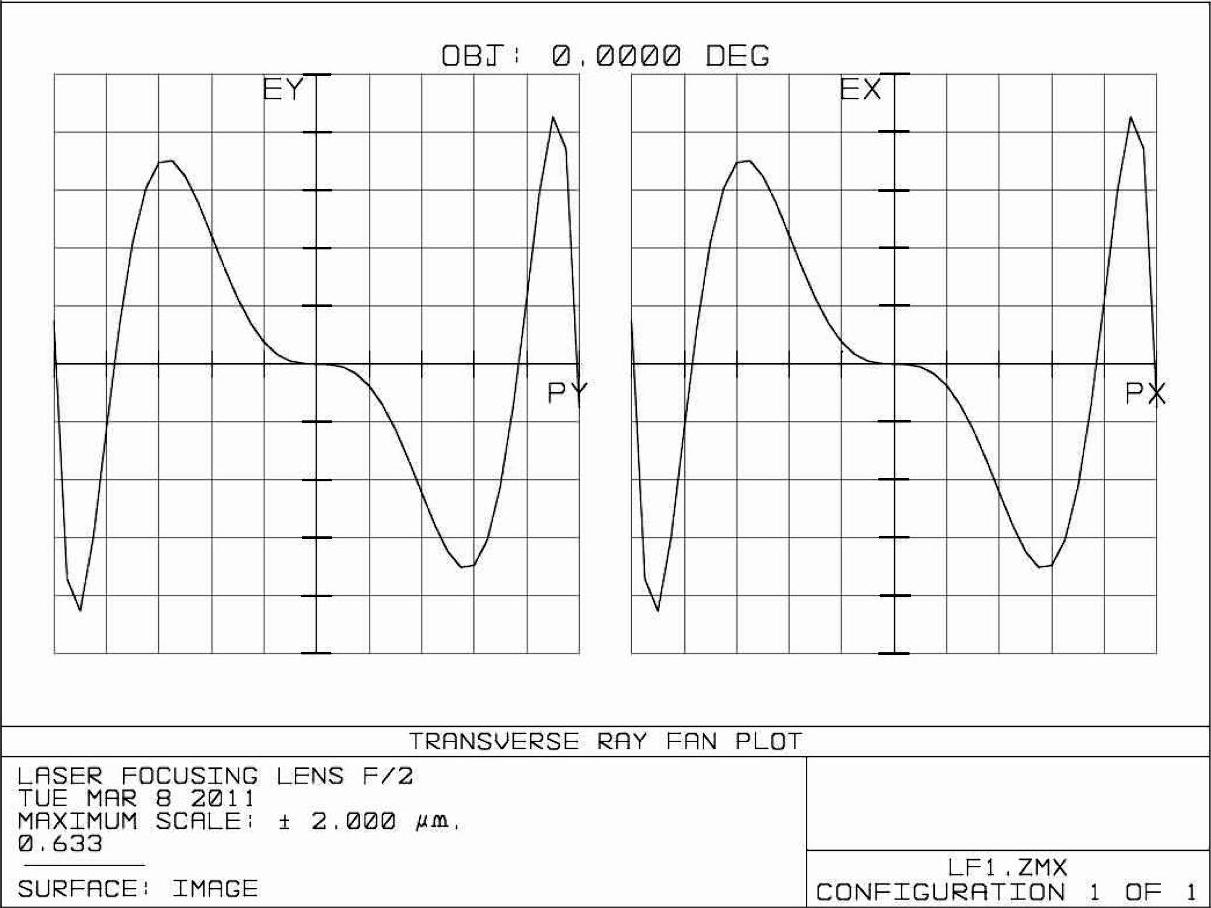
图2-8 第1步优化出的激光光束聚焦物镜“正前凸”型双片的像差曲线
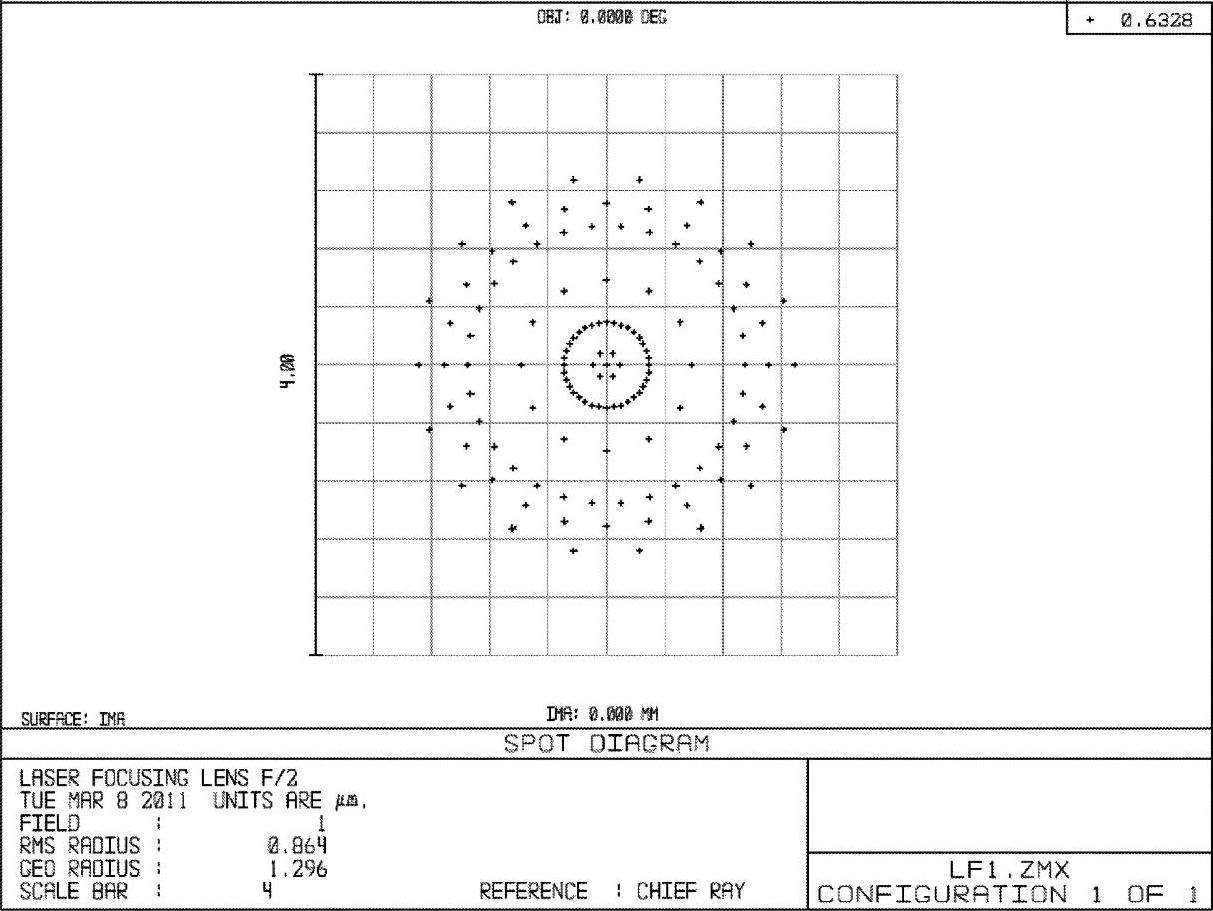
图2-9 第1步优化出的激光光束聚焦物镜“正前凸”型双片的点列图
由图2-6和图2-8比较可以看出,这一步优化后高级球差与初级球差达到了一定的平衡,故像质改善了许多。由图2-7和图2-9比较可以看出,优化后弥散圆半径由毫米级减小为微米级了。经第1步优化后,像质已经非常接近设计要求,转入第2步优化。
(2)第2步优化 第2步优化时,将物镜最后一面至像面的距离(像距)增加为变量。可以预见,经第1步优化后,像质近乎达到了要求,所以进一步优化时,将像距作为变量实质上就是将离焦量作为变量了。
令透镜的前三个折射面半径作变量,第四个折射面半径用以保证物镜的相对孔径 ,令两块透镜间的空气间隔和像距作变量;将0.3、0.5、0.7、0.85和全孔径的横向球差“TRAY”加入到评价函数中,它们的目标值都取0,权重都取1,即采用如下与第1步相同的评价函数:
,令两块透镜间的空气间隔和像距作变量;将0.3、0.5、0.7、0.85和全孔径的横向球差“TRAY”加入到评价函数中,它们的目标值都取0,权重都取1,即采用如下与第1步相同的评价函数:
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.3);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.5);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.7);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,0.85);0,1}
{TRAY(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAY(1;0,0;0,1);0,1}
第2步优化出的结构参数见表2-5,结构简图如图2-10所示。第2步优化出的像差曲线如图2-11所示,点列图如图2-12所示。经第2步优化后镜头的调制传递函数(MTF)曲线如图2-13所示。
表2-5 第2步优化出的激光光束聚焦物镜“正前凸”型结构参数

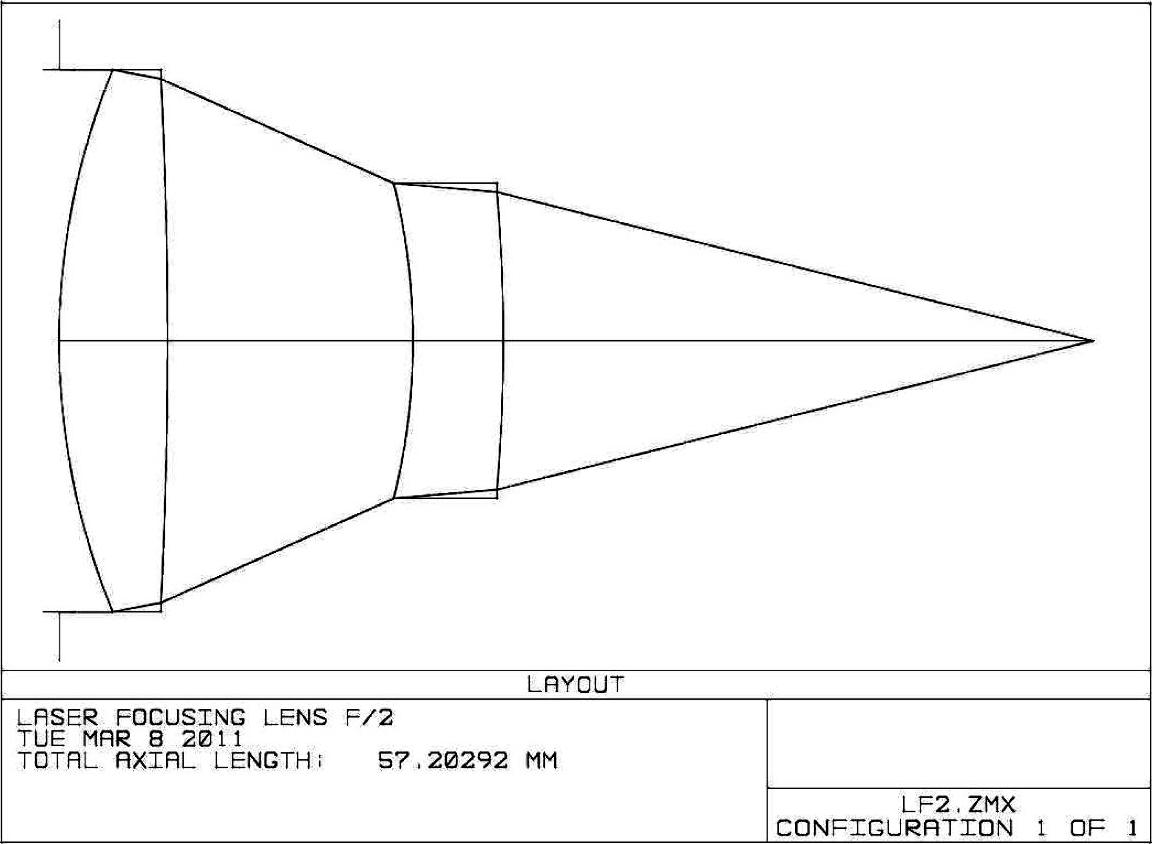
图2-10 第2步优化出的激光光束聚焦物镜“正前凸”型结构简图
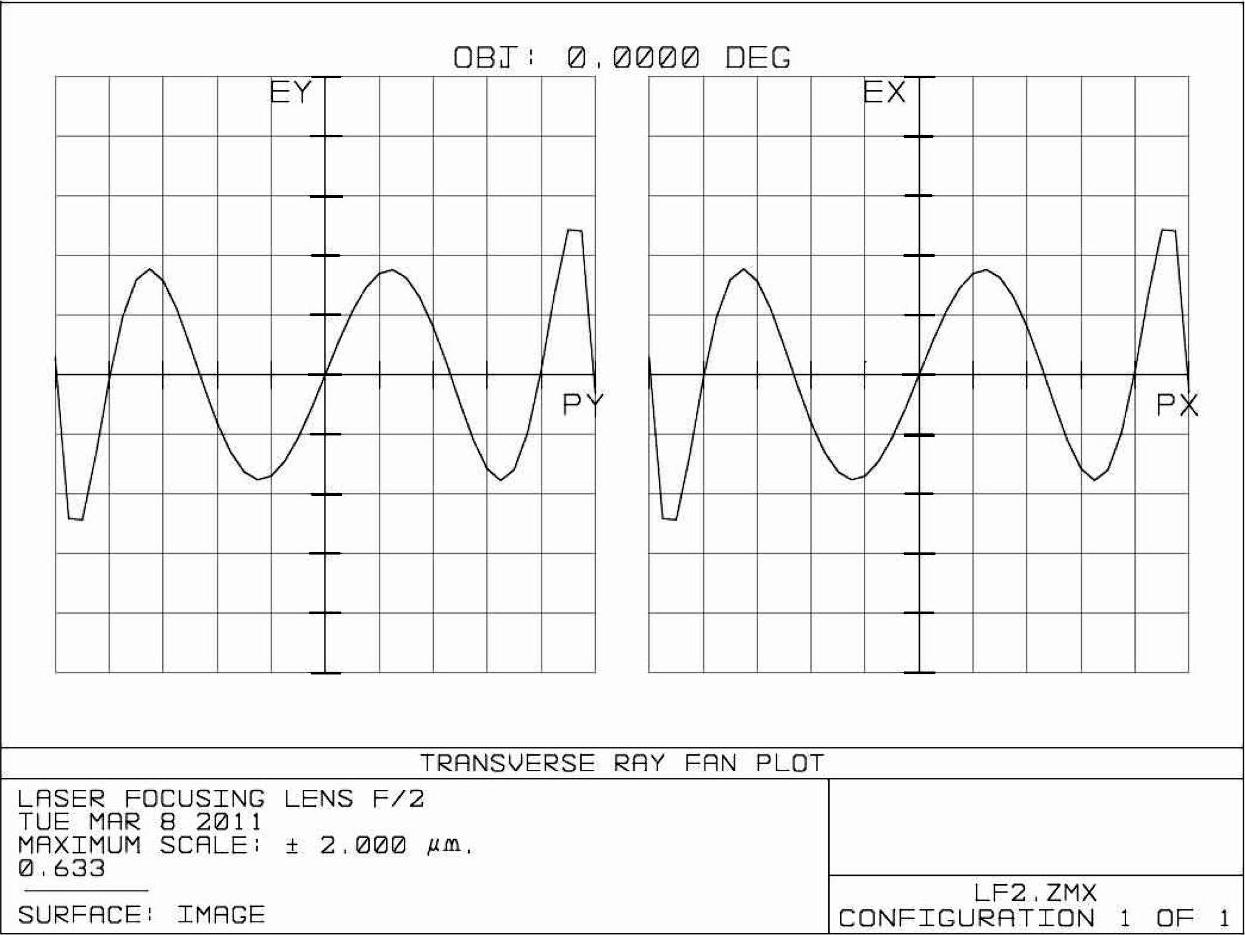
图2-11 第2步优化出的激光光束聚焦物镜“正前凸”型的像差曲线
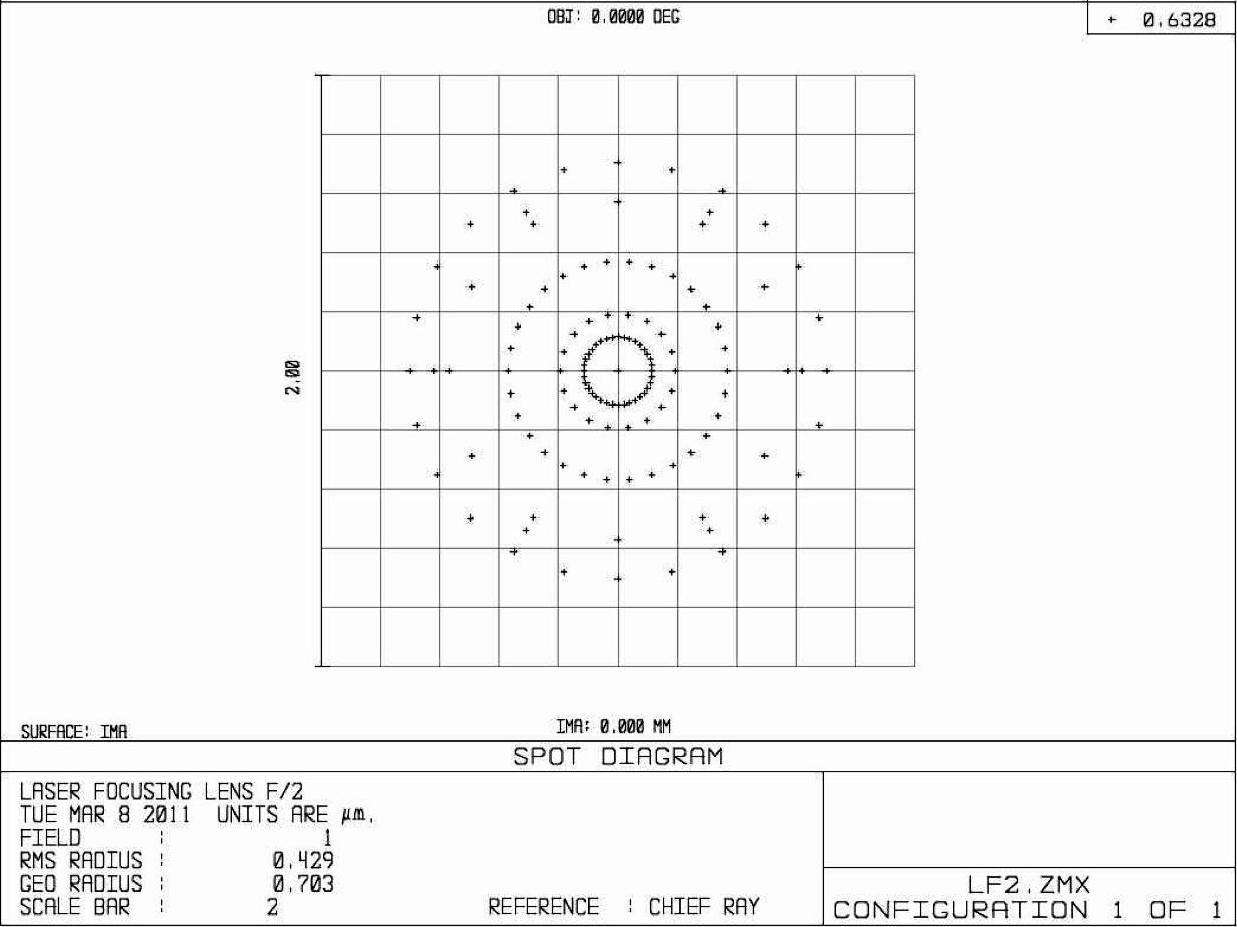
图2-12 第2步优化出的激光光束聚焦物镜“正前凸”型的点列图
由图2-8和图2-11的比较看出,第2步优化后,各级球差之间达到了更合理的平衡,致使残余球差很小,因而大大改善了像质。由图2-9和图2-12的比较看,点列图所描述的弥散圆半径从第2步优化前的0.0013mm减小为优化后的0.0007mm,远小于预定的要求,从调制传递函数看,几乎接近了理想情况。设计任务至此告一段落。
由上可见,最后结果的像质是很好的。当然这里选用了ZF14,只是作为了解玻璃折射率影响像差状况的一种练习,在实际工作中,材料的选用还要考虑性能价格比等因素。
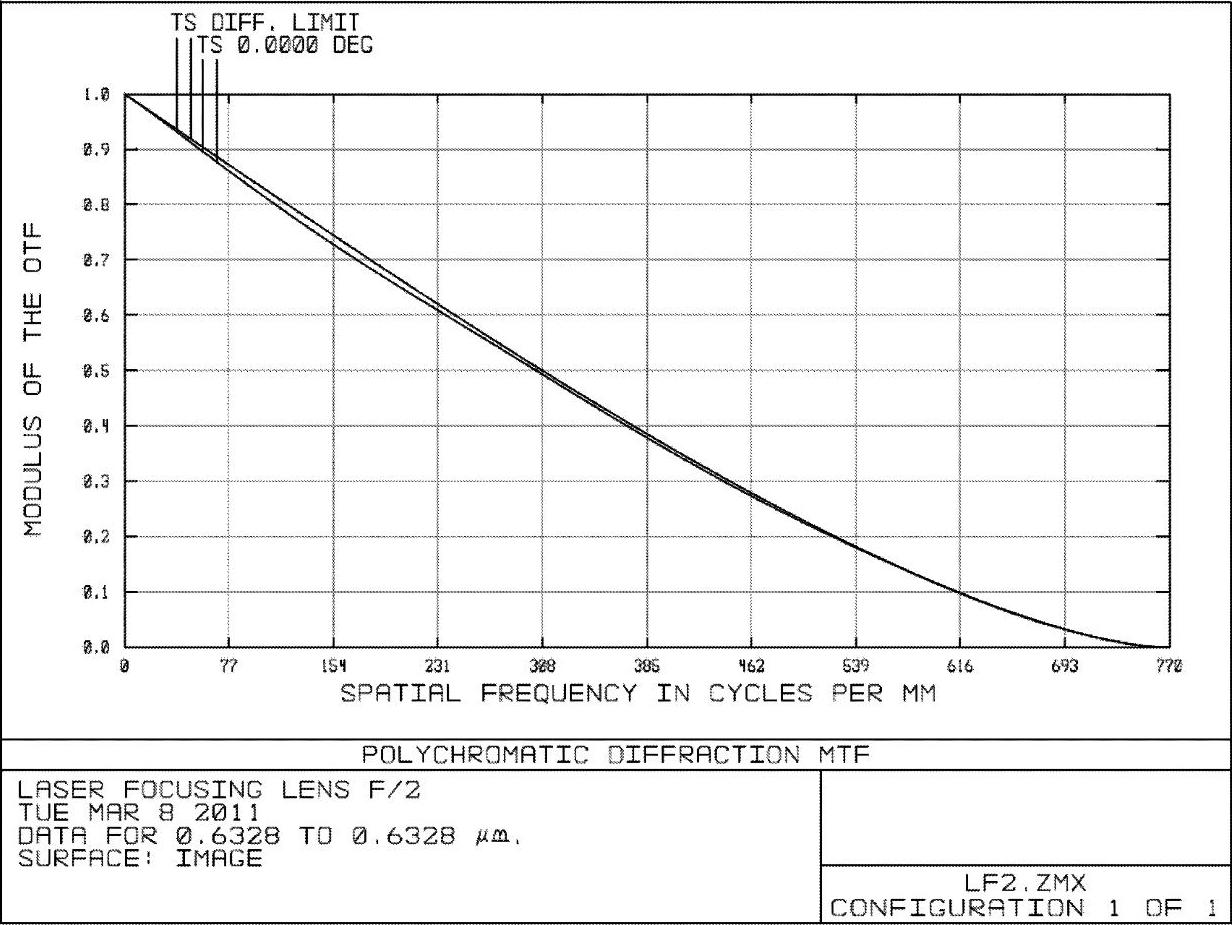
图2-13 第2步优化后激光光束聚焦物镜“正前凸”型的调制传递函数曲线
3.采用其他评价函数的优化
前面的优化过程中用ZEMAX程序中的横向球差“TRAY”构造了评价函数,分两步优化出了像质优良的镜头结构。事实上,评价函数的构造不是唯一的。下面,仍然从相同的初始结构出发,但采用不同的评价函数进行优化,结果说明,同样可以将镜头的像差优化好。
(1)利用“LONA”优化 初始结构仍采用本节1.中表2-3所列的“正前凸”型初始结构参数,取镜头的前三个半径、两片镜片间的空气间隔及离焦量作为变量,共有五个变量。最后一个半径用于保证镜头的相对孔径 。采用0.3、0.5、0.7、0.85孔径和全孔径的轴向球差“LONA”构造评价函数,它们的目标值都取0,它们的权重都取1。即采用由如下操作语句括号组成的评价函数:
。采用0.3、0.5、0.7、0.85孔径和全孔径的轴向球差“LONA”构造评价函数,它们的目标值都取0,它们的权重都取1。即采用由如下操作语句括号组成的评价函数:
{LONA(Wave;Zone);Target,Weight}⇒{LONA(1;0.3);0,1}
{LONA(Wave;Zone);Target,Weight}⇒{LONA(1;0.5);0,1}
{LONA(Wave;Zone);Target,Weight}⇒{LONA(1;0.7);0,1}
{LONA(Wave;Zone);Target,Weight}⇒{LONA(1;0.85);0,1}
{LONA(Wave;Zone);Target,Weight}⇒{LONA(1;1);0,1}
值得指出的是,这里所说的“LONA”是ZEMAX程序中的定义,程序中的称谓为轴向(纵向)像差操作数,其含义在此处相当于统称的轴向球差。使用“LONA”时其下要确定两个参数,一个是当前要计算的波长,例如这里是He-Ne激光,即波长是0.6328μm,这在建立该镜头的初始结构参数文件时已经在程序主窗口的“WAV”中确定,并标明了它的波长序数为1;第二个明确是哪个孔径的,例如上述评价函数中分别指定为0.3、0.5、0.7、0.85和全孔径,一般情况下它的单位为微米(μm)。
经优化后,得到表2-6所列的结构参数,结构简图如图2-14所示,它的像差曲线、点列图和调制传递函数曲线分别如图2-15~图2-17所示。
表2-6 利用“LONA”优化出的激光光束聚焦物镜结构参数


图2-14 利用“LONA”优化出的激光光束聚焦物镜结构简图
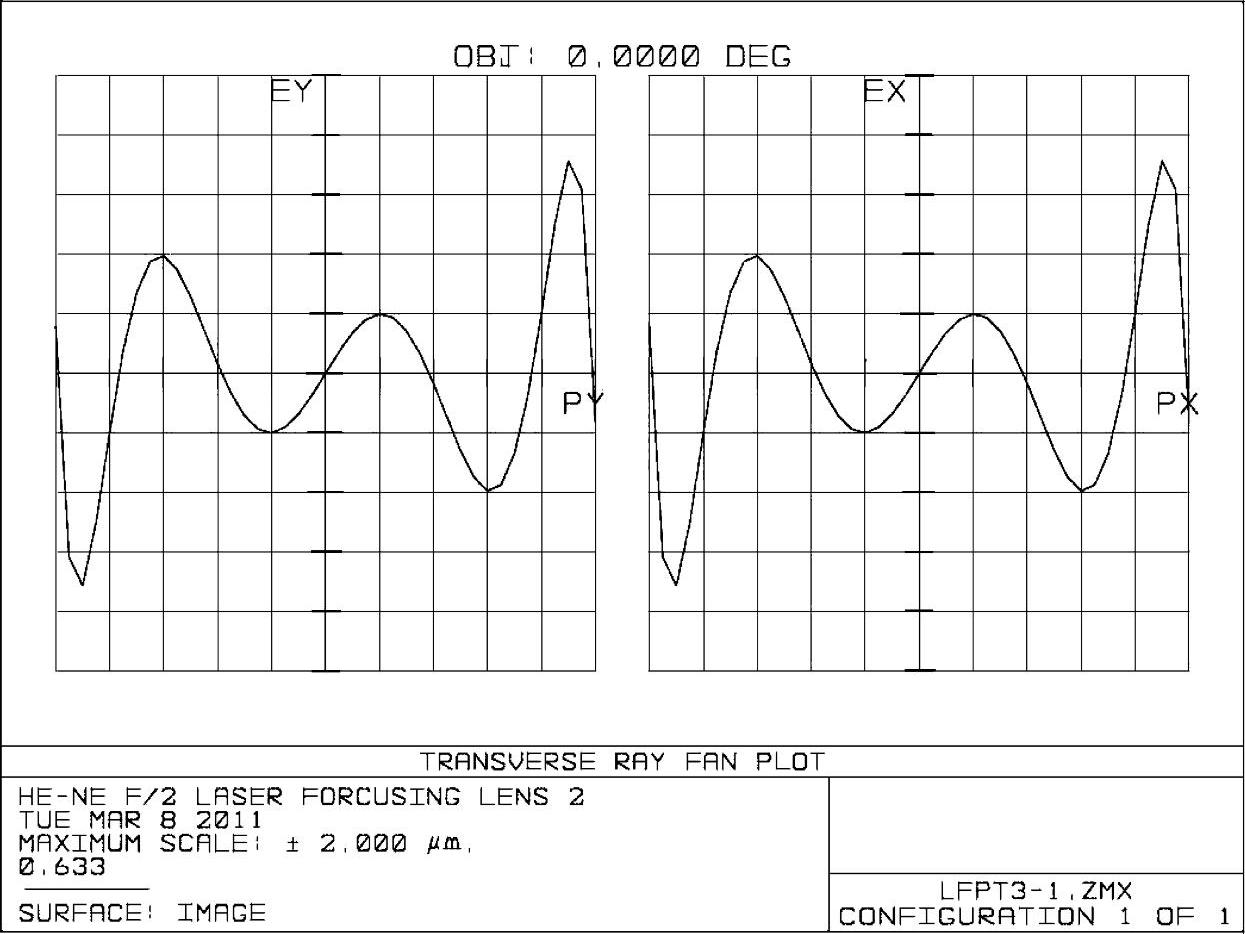
图2-15 利用“LONA”优化出的激光光束聚焦物镜像差曲线
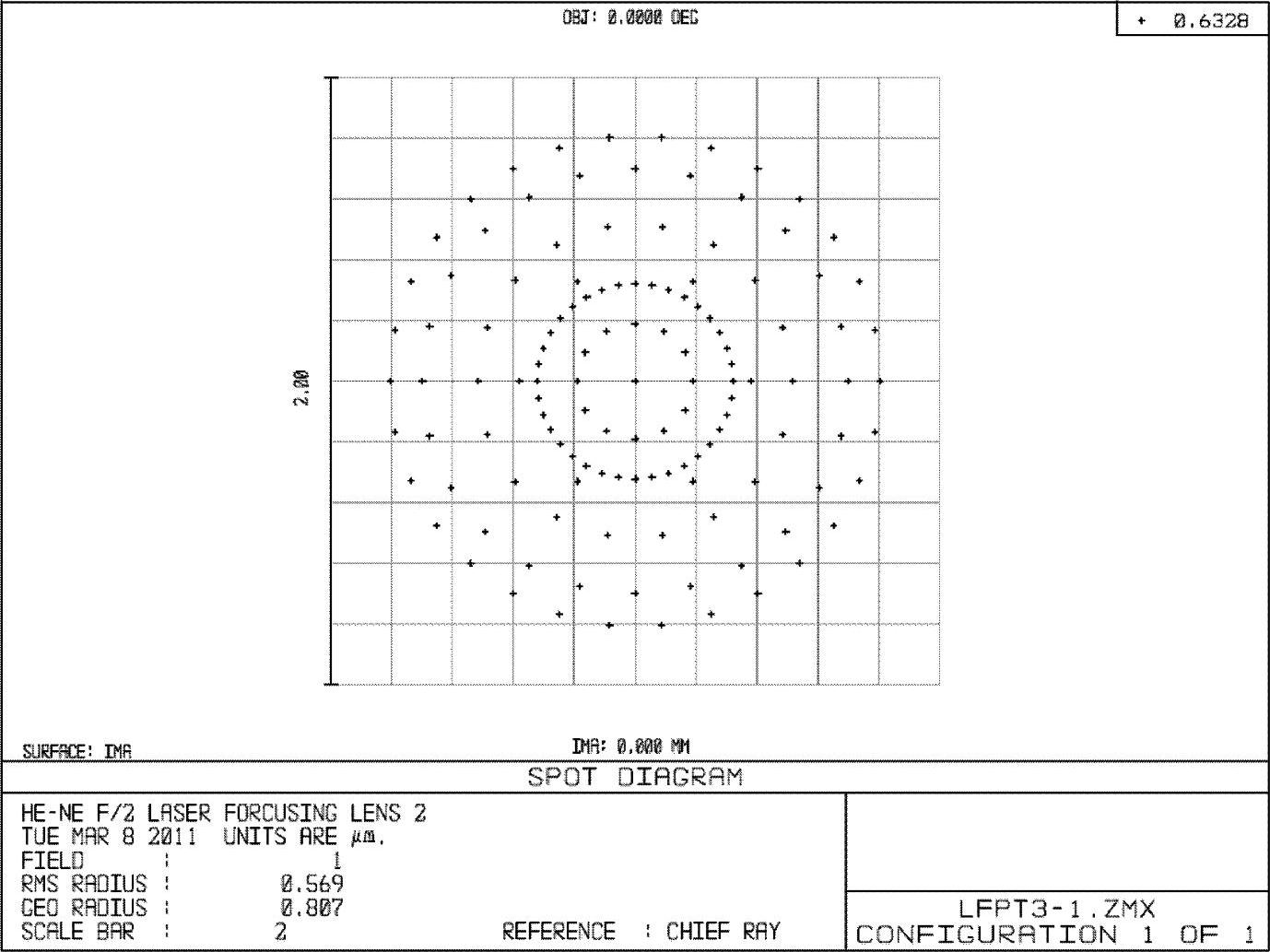
图2-16 利用“LONA”优化出的激光光束聚焦物镜点列图
图2-17 利用“LONA”优化出的调制传递函数曲线
(2)利用“TRAC”优化 初始结构仍采用本节1.中表2-3所列的“正前凸”型初始结构参数,取镜头的前三个折射面半径、两块镜片间的空气间隔以及像距作变量,共有五个变量。最后一个折射面半径用于保证镜头的相对孔径 。采用ZEMAX程序提供的由“TRAC”构成的默认评价函数,另在其中增加全孔径的“TRAC”,它的目标值取0,权重取1。构成评价函数的操作语句括号如下:
。采用ZEMAX程序提供的由“TRAC”构成的默认评价函数,另在其中增加全孔径的“TRAC”,它的目标值取0,权重取1。构成评价函数的操作语句括号如下:
{TRAC(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAC(1;0,0;0.336,0);0,0.873}
{TRAC(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAC(1;0,0;0.707,0);0,1.396}
{TRAC(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAC(1;0,0;0.942,0);0,0.873}
{TRAC(Wave;Hx,Hy;Px,Py);Target,Weight}⇒{TRAC(1;0,0;1,0);0,1}
其中,前三句是ZEMAX程序提供的默认评价函数,最后一句操作语句是添加的。值得指出,操作数“TRAC”的含义雷同于前面用过的“TRAY”,本质上是横向像差,差别在于“TRAY”是以主光线在像面上的交点为参考点,而“TRAC”是以全部光线在像面上交点的“质心(Cen-troid)”为参考点。对于轴上点而言,两个参考点是相同的。经优化后,得到表2-7所列的结构参数,得到结构简图如图2-18所示,它的像差曲线、点
列图和调制传递函数曲线分别如图2-19~图2-21所示。
表2-7 利用“TRAC”优化出的激光光束聚焦物镜结构参数

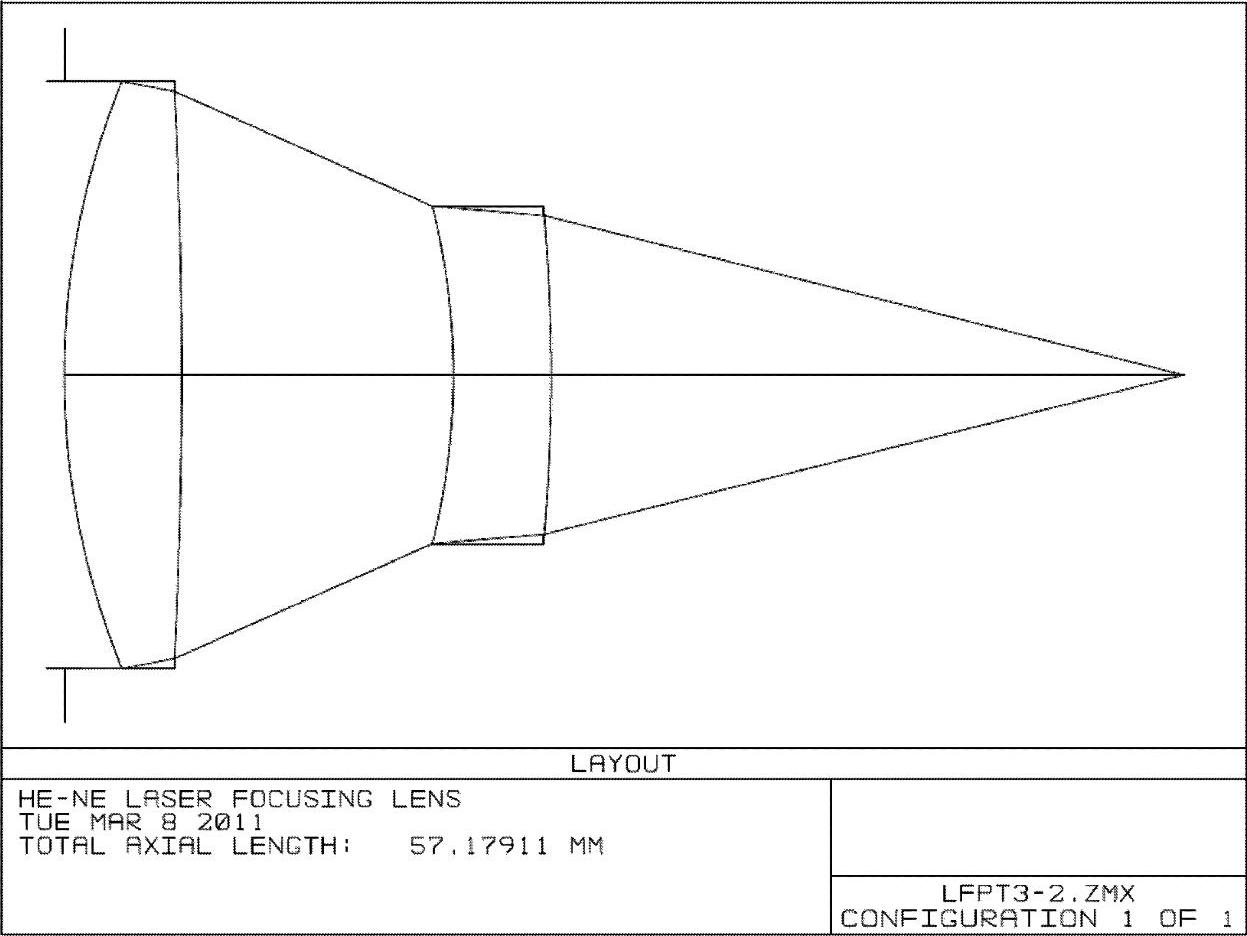
图2-18 利用“TRAC”优化出的激光光束聚焦物镜结构简图
两个优化结果表明,弥散圆半径小于0.001mm,调制传递函数非常接近理想情况,像质非常优良,远好于设计要求。说明从同一个初始结构出发,采用不同的评价函数,即相当于在问题的解空间中走过不同的路径,也是有可能到达镜头像质较佳位置的。
值得注意,由“TRAY”、“LONA”和“TRAC”这三个评价函数优化出的物镜结构都是雷同的,这可能与初始结构相同以及所用评价函数性质相近不无关系。

图2-19 利用“TRAC”优化出的激光光束聚焦物镜像差曲线
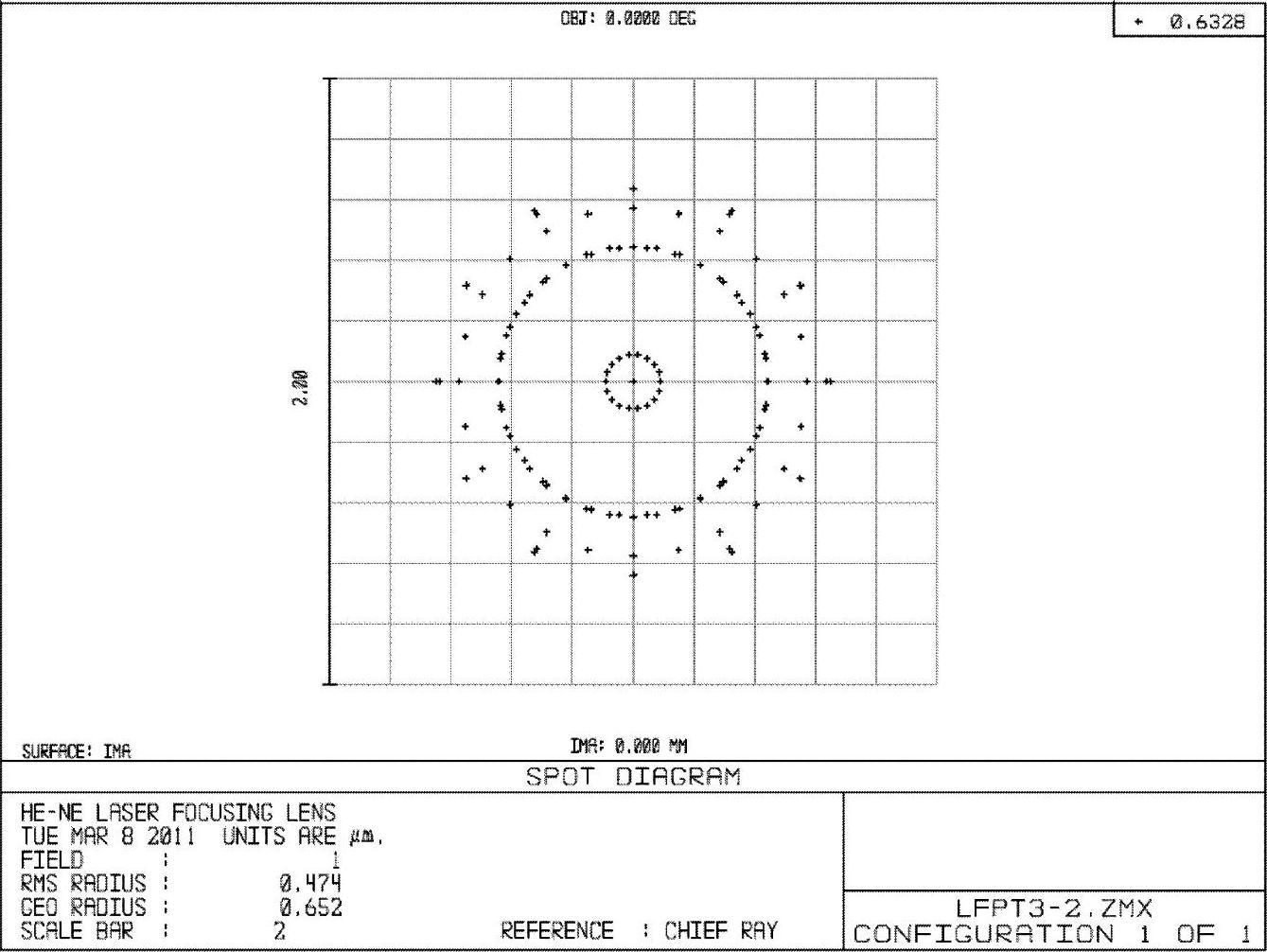
图2-20 利用“TRAC”优化出的激光光束聚焦物镜点列图
图2-21 利用“TRAC”优化出的激光光束聚焦物镜调制传递函数曲线
有关现代光学镜头设计方法与实例的文章

解:1)自感电动势为图2-31 “负前凸”型激光光束聚焦物镜例2的点列图负号表示自感电动势总是企图阻碍电流的变化。求自感电动势时可取绝对值,即图2-32 “负前凸”型激光光束聚焦物镜例2的调制传递函数曲线“负前凸”型例2与例1的像质都很优良,但“负前凸”型例2的系统长度比例1的缩短了。......
2023-06-20

本文所倡导的创业型大学学科发展模式,就是将学科融入学院实体组织中,而不是在学院建设之外重建实体性的学科组织。具体而言,当前创业型大学激活学科,应该关注以下几点。因此,创业型大学的学科建设,既高于学院架构,又植根二级学院。......
2023-10-05

我们研制开发的角柱形瓦楞套箱,有效提高了纸箱的抗压强度,在减少资源消耗的同时,大大降低了生产成本。本节介绍的角柱型瓦楞纸套箱结构是重型包装的一个新方向,其抗压强度是相同尺寸与材质的0201型普通纸箱的2倍左右,在高温高湿等恶劣条件下,纸箱的抗压强度下降较少,具有明显的耐压优势。图1-6-8套箱高度对抗压强度影响角柱型瓦楞托盘套箱(大尺寸)的抗压强度针对大尺寸角柱型瓦楞纸箱,研究角柱型对纸箱抗压强度的影响。......
2023-06-27

[9]如图1所示,将创业型大学分成创业Ⅰ型、创业Ⅱ型两大类,体现了学术能力与创业能力的非对称性,表明了创业型大学有着不同的发展阶段,为创业型大学理论大厦的构建提供了方法视角与理论基础。根本原因在于,学界尚未对创业型大学的内涵界定与类型划分达成普遍共识。......
2023-10-05

同时,该两分法对创业型大学的实践亦具有指导性。不过,这种两分法不能建立在两位创业型大学理论鼻祖的理论观点或者欧美两个区域的实践模式之上,只能建立在教学型院校与研究型大学两种不同层次的办学实体上。克拉克的创业型大学理论,远远不只是建立在欧洲案例上,不只是建立在教学型院校案例上,它已经扩展到全球各类高校。......
2023-10-05
与传统院校相比,创业型大学的科学研究有以下特点:其一,在研究目的上,以成果转化业绩论英雄。创业型大学强调学术成果贵在转化,以实践作为检验科研成果的标准,突出科学研究的应用价值。创业型大学的人文社会科学知识,同样存在转化的可能与方向。而且,创业型大学教师的职称评聘,不重视理论成果数量,在达到基本业绩要求后,重点考评学术成果的社会反响或者转化效果。......
2023-10-05
目前为止,众多学者已经对镜头突变检测进行了深入的研究和实验验证,并且大都取得了令人较为满意的检测结果。根据YUV模型各分量可分离的特点,利用Y分量分块直方图对镜头进行突变检测,利用U分量对光照的不敏感性排除由光照引起的误检。在本节的后续描述中将重点介绍4种较为经典的镜头突变检测方法。......
2023-11-23

给准上市公司高管的忠告在路演途中,我们深刻感受到一荣俱荣、一毁俱毁的“耦合效应”。路演的那几天,如家、7天的股票还在持续下跌,真是让人着急。我们在对待竞争对手的问题上,始终强调中国的市场够大,完全容得下几家相当规模的酒店公司;而且我们三家策略不一样,彼此并不是你死我活的恶性竞争关系。这家基金同样也给汉庭下了挺大的订单。因此准备上市的公司高管们,注意锻炼好身体吧!......
2023-12-06
相关推荐