图6-31 加入装配体零件的过程图2)同样的方法将曲柄加入装配体文件中,选择曲柄的圆柱孔曲面和机架的圆柱柱面,单击配合,选择配合关系同轴心,具体操作如图6-32所示。图6-37 旋转马达的设置3)单击计算,此时可以看到曲柄滑块机构的仿真动画开始运行,单击停止可以随时停止。图6-41 滑块的线速度的幅值图6-42 滑块的线加速度的幅值......
2023-11-21
向机构装置中增加伺服电动机后,便可建立机构的运动分析(定义)并运行。
在每个运动定义中,可选择要打开或关闭的伺服电动机并指定其时间周期,以定义机构的运动方式。虽然可为一个图元定义多个伺服电动机,但一次只能打开图元的一个伺服电动机,例如为一个图元创建了一个连接轴伺服电动机和一个平面—平面旋转角度伺服电动机,则在相同的运行时间框架内不要同时打开这两个伺服电动机。
在“分析定义”对话框中,利用“锁定的图元”区域的命令按钮,可选取主体或连接进行锁定,这样当运行该运动定义时,这些锁定的主体或连接将不会相互移动。
可以创建多个运动定义,每个定义都使用不同的伺服电动机和锁定不同的图元。根据已命名的回放次序保存每个定义,便于以后查看。
下面以实例说明运行运动的一般过程。
Step1.选择下拉菜单 命令。
命令。
Step2.此时系统弹出图9.5.64所示的“分析定义”对话框,在该对话框中进行下列操作:
(1)输入此分析(即运动)的名称。在“分析定义”对话框的“名称”文本框中输入分析名称,或采用默认名。
(2)选择分析类型。选取此分析的类型为“位置”。
(3)调整伺服电动机顺序。如果机构装置中有多个伺服电动机,可单击对话框中的 标签,在图9.5.65所示的选项卡中调整伺服电动机顺序。由于本例中只有一个伺服电动机,所以不必进行本步操作。
标签,在图9.5.65所示的选项卡中调整伺服电动机顺序。由于本例中只有一个伺服电动机,所以不必进行本步操作。
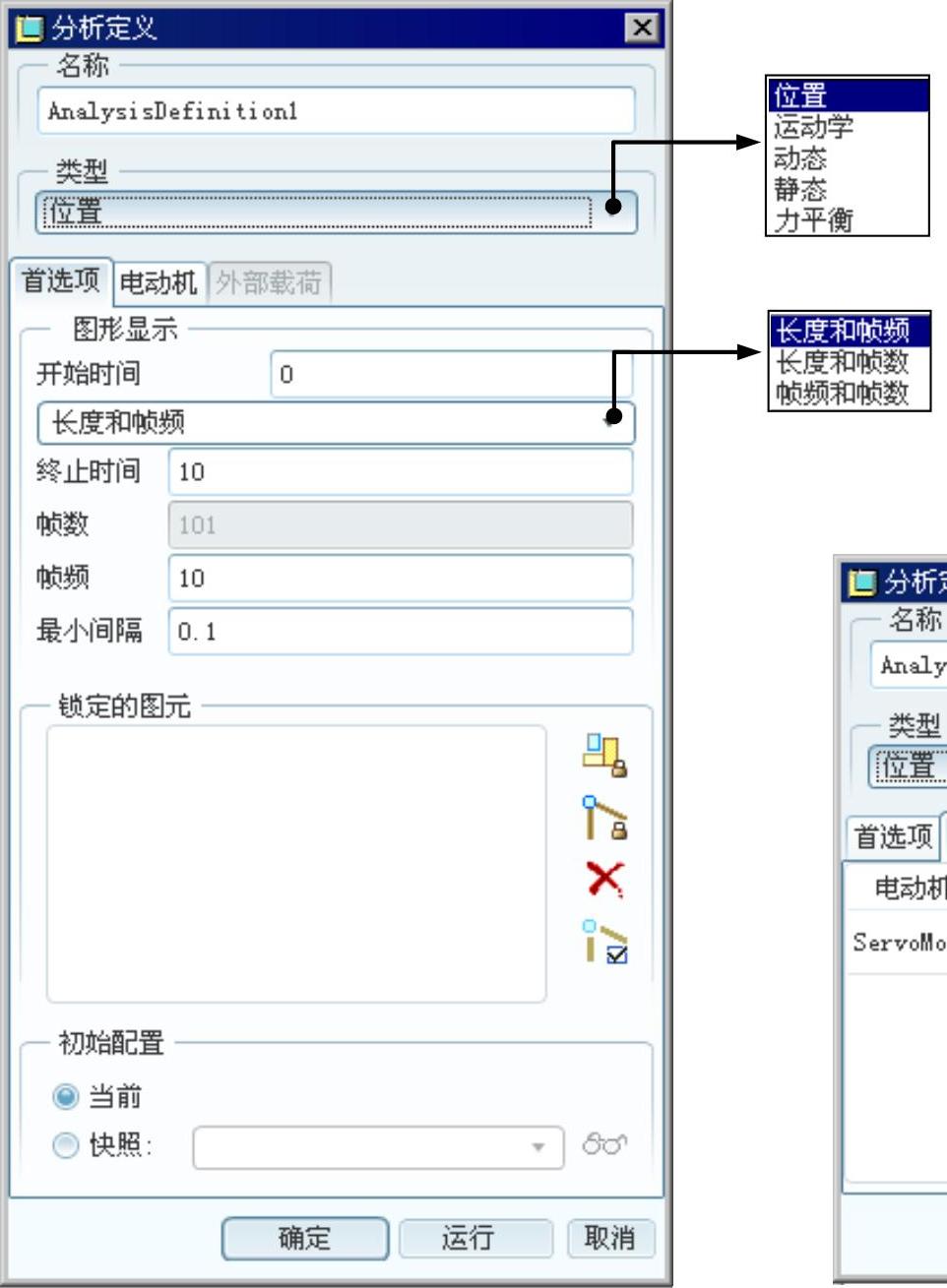
图9.5.64 “分析定义”对话框
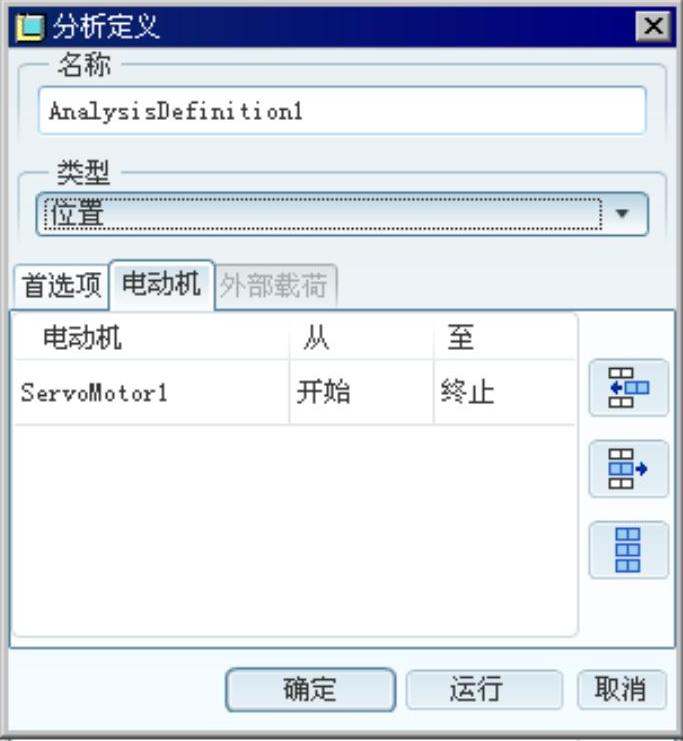
图9.5.65 “电动机”选项卡
(4)定义动画时域。在图9.5.64所示的“分析定义”对话框的 区域进行下列操作:
区域进行下列操作:
①输入开始时间:0(单位为秒)。
②选择测量时间域的方式。在该区域的下拉列表中选择 。
。
③输入终止时间:1(单位为秒)。
④输入帧频:100。
注意:
● 测量时间域的方式有三种:
① :输入运行的时间长度(结束时间-开始时间)和帧频(每秒帧数),系统计算总的帧数和运行长度。
:输入运行的时间长度(结束时间-开始时间)和帧频(每秒帧数),系统计算总的帧数和运行长度。
② :输入运行的时间长度和总帧数,系统计算运行的帧频和长度。
:输入运行的时间长度和总帧数,系统计算运行的帧频和长度。
③ :输入总帧数和帧频(或两帧的最小时间间隔),系统计算结束时间。
:输入总帧数和帧频(或两帧的最小时间间隔),系统计算结束时间。
● 运行的时间长度、帧数、帧频和最小时间间隔的关系:
帧频=1/最小时间间隔。
帧数=帧频×时间长度+1。
(5)进行初始配置。在图9.5.64所示“分析定义”对话框的 区域,选中
区域,选中 单选按钮。
单选按钮。
注意:
● 当前:以机构装置的当前位置为运行的初始位置。
● 快照:从保存在“拖动”对话框中的快照列表中选择某个快照,机构装置将从该快照位置开始运行。
Step3.运行运动定义。在图9.5.64所示的“分析定义”对话框中,单击 按钮。
按钮。
Step4.单击对话框中的 按钮,完成运动定义。
按钮,完成运动定义。
有关Pro/ENGINEER中文野火版5.0高级应用教程的文章

图6-31 加入装配体零件的过程图2)同样的方法将曲柄加入装配体文件中,选择曲柄的圆柱孔曲面和机架的圆柱柱面,单击配合,选择配合关系同轴心,具体操作如图6-32所示。图6-37 旋转马达的设置3)单击计算,此时可以看到曲柄滑块机构的仿真动画开始运行,单击停止可以随时停止。图6-41 滑块的线速度的幅值图6-42 滑块的线加速度的幅值......
2023-11-21

10-1 如图10-19 所示机构中,椭圆规尺长AB=40 cm,曲柄长OC=20 cm,且AC=CB。如曲柄以匀角速度ω=πrad/s 绕O 轴转动,且已知AM=10 cm,求尺上M 点的运动方程和轨迹方程;t=0 和t=0.5 s 时的M 点的速度和加速度。图10-19题10-1图图10-20题10-2图10-3 如图10-21 所示,列车沿半径为R=800 m 的圆弧轨道做匀加速运动。图10-21题10-3图10-4 荡木用两条等长的钢索平行吊起,如图10-22 所示。......
2023-06-19

(一)凸轮机构的组成、功用及分类凸轮机构在纺织机械中应用相当广泛。通过凸轮运动曲线的设计,可以达到所要求的各种运动方案,并且结构紧凑。凸轮机构是主要由凸轮、从动件和机架组成。图2-23盘状凸轮机构按凸轮的形状分,凸轮可分为盘形凸轮、圆柱凸轮和移动凸轮,如图2-24 所示。(二)纺织机械中从动件运动规律的选择1.凸轮机构运动线图 从动件的运动规律是指从动件的位移、速度、加速度随凸轮转角的变化规律,如图2-25 所示。......
2023-06-16

模具运动机构的选择对注塑模运动形式的影响很大。模具运动机构已经有很多,随着注塑件的结构和精度要求的不断发展,模具运动机构还将会不断地推陈出新。脱模机构的复位运动 注塑件脱模之后,脱模机构需要恢复到注塑件脱模之前的位置,以便进行下一次注塑件的脱模,我们将这种运动称为脱模机构的复位运动,简称复位运动。......
2023-06-30

图6-4 连杆草图图6-5 连杆实体图5)利用对曲柄和连杆的修改可以得到机架长度为160mm和摇杆长度为150mm的三维实体图,如图6-6和图6-7所示。1)单击新建运动算例后,屏幕下方此时出现运动算例工作区,如图6-12所示,在算例类型下拉菜单中选择Motion分析,时间设置中选择5秒,如图6-13所示。图6-16 摇杆角速度幅值图6)通过设置可以得到摇杆的角加速度的幅值,如图6-17所示。......
2023-11-21

本节主要内容是指导用户如何把顺序控制梯形图程序转换成FB程序,同时确保程序实现的功能不变。图7-64 FB定义程序的新建3)如图7-65所示步骤双击鼠标,进入标签登录画面。图7-70 进入程序主单元顺序控制程序的编写按图7-72所示内容,编写带有FB的顺序控制程序,其编程方法与顺序控制梯形图程序的操作相同。......
2023-06-16

以潘家铮院士为主任的技术鉴定委员会的鉴定意见认为:“在水电水利枢纽建造2×500t级湿运全平衡钢丝绳卷扬提升式垂直升船机并成功投运,在国内外都是第一次,水口升船机建设及运行经验为国内三峡等后续工程的升船机建设提供了借鉴。水口升船机的建设及运行项目成果总体上已达到了国际先进水平,其中,安全锁锭装置、折叠式对接密封装置和大惯量垂直提升系统二级调压事故制动控制等技术居国际领先水平。”......
2023-06-27

任务要求绘制缝纫机踏板机构的运动简图,分析其组成及运动特点。图2.6双曲柄机构图2.7惯性筛双曲柄机构中,当两曲柄长度相等,连杆与机架的长度也相等时,称为平行双曲柄机构或平行四边形机构。图2.9公共汽车车门启闭机构双摇杆机构铰链四杆机构的两个连架杆均为摇杆时,称为双摇杆机构,如图2.10所示。......
2023-06-30
相关推荐