当限位开关动作后简易升降机仍不能停止运行时,则触动极限开关切断电路,使驱动主机和制动器失电,简易升降机停止运行。极限开关与限位开关相邻而设,但是必须确保极限开关与限位开关不联动。当限位开关触发,货厢仍然无法停止运行时,就会触发极限开关,切断动力电源。图3-36 极限开关和限位开关的设置对于极限开关动作方式,应采用以下两种方式的一种:1)采用强制的机械方法直接切断电动机和制动器供电回路。......
2023-07-01
在机构装置中添加连接元件后,还可对“运动轴”进行设置,其意义如下:
● 设置运动轴的当前位置:通过在连接件和组件中选取两个零位置参照,然后输入其间角度(或距离)值,可设置该运动轴的位置。定义伺服电动机和运行机构时,系统将以当前位置为默认的初始位置。
● 设置再生值:可将运动轴的当前位置定义为再生值,也就是装配件再生时运动轴的位置。如果设置了运动轴极限,则再生值就必须设置在指定的限制内。
● 设置极限:设置运动轴的运动范围,超出此范围,接头就不能平移或转动。除了球接头,我们可以为所有其他类型的接头设置运动轴位置极限。
下面将以一个范例来说明运动轴设置的一般过程。本范例中需要设置两个运动轴。
Stage1.第一个运动轴设置
Step1.选择下拉菜单
 命令进入机构模块,然后选择下拉菜单
命令进入机构模块,然后选择下拉菜单


 命令,用“点拖动”将驱动杆子装配(actuating_rod_asm.asm)拖到图9.5.50所示的位置(读者练习时,拖移后的位置不要与图中所示的位置相差太远,否则后面的操作会出现问题),然后关闭“拖移”对话框。
命令,用“点拖动”将驱动杆子装配(actuating_rod_asm.asm)拖到图9.5.50所示的位置(读者练习时,拖移后的位置不要与图中所示的位置相差太远,否则后面的操作会出现问题),然后关闭“拖移”对话框。
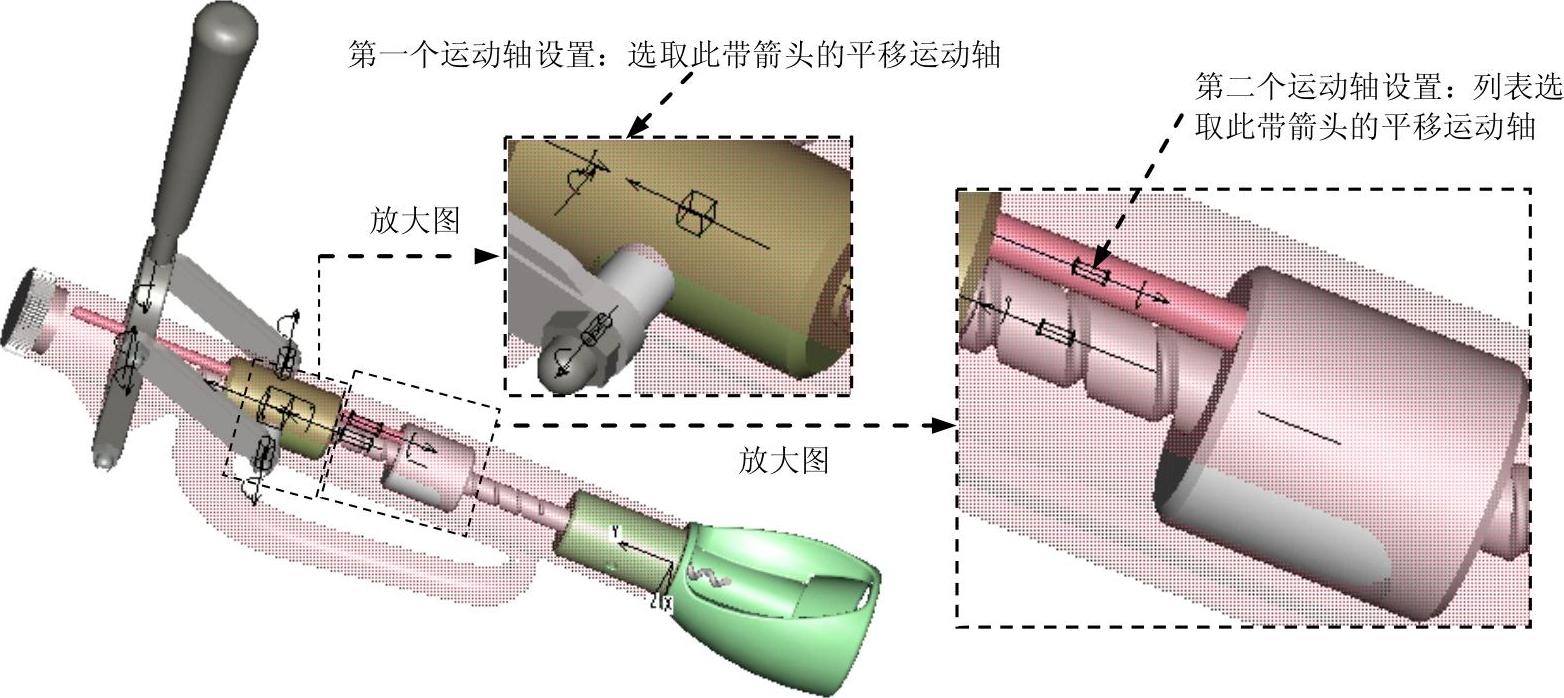
图9.5.50 运动轴设置
Step2.对运动轴进行设置(注:本步的详细操作过程请参见随书光盘中video\ch09.05\reference\文件下的语音视频讲解文件body-r01.avi)。
Stage2.第二个运动轴设置
Step1.选择下拉菜单 命令,查找并选取运动轴“Connection_4c.first_trans_axis_”。
命令,查找并选取运动轴“Connection_4c.first_trans_axis_”。
Step2.选择下拉菜单 命令,系统弹出“运动轴”对话框,在该对话框中进行下列操作:
命令,系统弹出“运动轴”对话框,在该对话框中进行下列操作:
(1)在连接件和组件上选取零参照。选取止动杆(Stop_Rod)零件中的图9.5.51所示的端面,以及机体(Body)零件中的图9.5.52所示的端面,则选取的参照自动显示在图9.5.53所示的“运动轴”对话框中。
(2)指定再生值。在对话框中选中 ,采用默认的再生值“5.0”,如图9.5.53所示。
,采用默认的再生值“5.0”,如图9.5.53所示。
(3)定义运动轴极限。在对话框中选中 ,并在其后的文本框中输入“5.0”;选中
,并在其后的文本框中输入“5.0”;选中 ,并输入“43.0”,这样就限定了该运动轴的运动范围。
,并输入“43.0”,这样就限定了该运动轴的运动范围。
(4)单击对话框中的 按钮。
按钮。
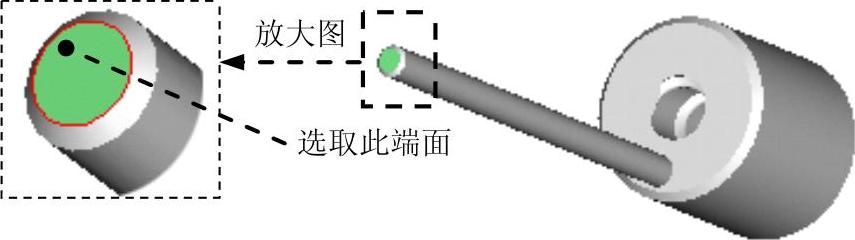
图9.5.51 选取止动杆零件的端面
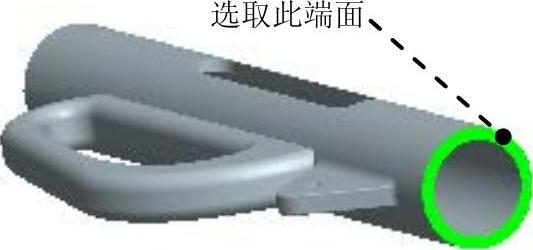
图9.5.52 选取主体机体盖的端面
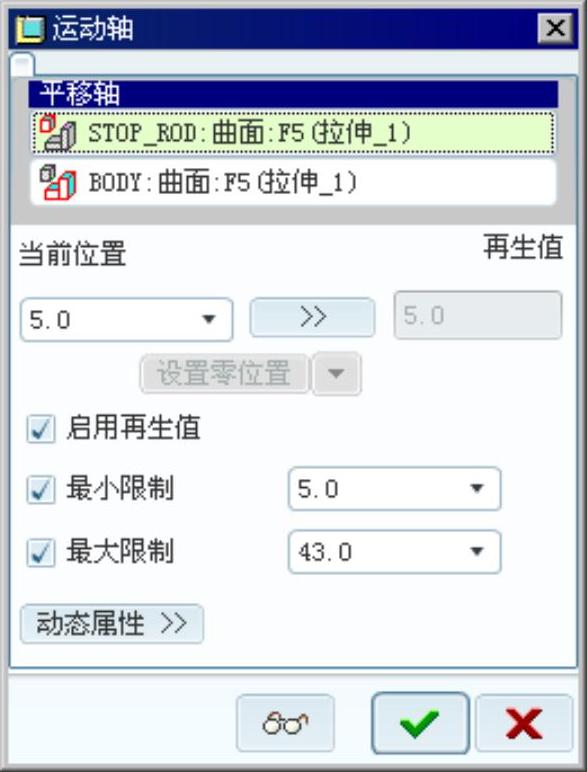
图9.5.53 “运动轴”对话框
Step3.验证:选择下拉菜单 命令,拖移止动杆(Stop_Rod)零件,可验证所定义的极限已经起作用了。
命令,拖移止动杆(Stop_Rod)零件,可验证所定义的极限已经起作用了。
有关Pro/ENGINEER中文野火版5.0高级应用教程的文章

当限位开关动作后简易升降机仍不能停止运行时,则触动极限开关切断电路,使驱动主机和制动器失电,简易升降机停止运行。极限开关与限位开关相邻而设,但是必须确保极限开关与限位开关不联动。当限位开关触发,货厢仍然无法停止运行时,就会触发极限开关,切断动力电源。图3-36 极限开关和限位开关的设置对于极限开关动作方式,应采用以下两种方式的一种:1)采用强制的机械方法直接切断电动机和制动器供电回路。......
2023-07-01

Stage1.插入操作Step1.选择下拉菜单命令,系统弹出“创建工序”对话框。Step2.确定加工方法。图5.3.5 “可变轮廓铣”对话框图5.3.6 “曲面区域驱动方法”对话框Step3.单击“切削方向”按钮,在图形区选取图5.3.8所示的箭头方向。Stage3.设置刀轴与投影矢量Step1.设置刀轴。在“可变轮廓铣”对话框区域的下拉列表中选取选项。Step4.单击按钮,完成切削参数的设置,系统返回到“可变轮廓铣”对话框。图5.3.11 “刀轴控制”选项卡图5.3.12 “转移/快速”选项卡......
2023-06-18

我们假设CoMP流量占总流量的一部分,而0.5~0.9的比率用于评估性能。在图9-7中,我们在阻塞概率方面对本节所提出的V-BRH和C-RoFN的性能进行了比较。CP可以用合理的方法分配资源,图9-7给出了V-BRH和C-RoFN的资源占用率,CoMP流量比为0.8。图9-7显示了响应延迟,我们假设BBU响应时间达到1 ms级别,并且当速率为130 Erlang时,将V-BRH和C-RoFN的平均响应时间进行对比。图9-7V-BRH和C-RoFN的性能对比分析图......
2023-06-19

Stage1.定义程序的起始序列Step1.选择命令。Step2.设置程序开始。图9.3.2 “程序和刀轨”选项卡Step3.修改程序开始命令。图9.3.6 “Start of Program-块:absolute_mode”对话框(四)Step4.定义新添加的程序开始程序。设置G80为强制输出。Step5.然后在“Start of Program-块:absolute_mode”对话框(四)中单击按钮,系统返回到“程序”选项卡,如图9.3.7所示。图9.3.8 “操作起始序列”节点界面(一)图9.3.9 “运算程序消息”对话框图9.3.10 “操作起始序列”节点界面(二)Stage3.定义刀轨运动输出格式Step1.选择命令。......
2023-06-18

进入模型运动模拟工作台操作参见1.3。同时对话框关闭,回到对话框。零件按铰接配合在一起,同时在左边的模型树中出现机构名称和铰的名称。在图形区单击选择外套零件,出现一个消息框,提示现在设置的机构可以被模拟。模拟圆柱铰运动单击工具栏内的使用命令进行模拟图标,出现对话框。单击工具栏中的保存图标,将该装配部件保存。......
2023-07-01
(一)轴的用途及分类轴是组成机器的主要零件之一。在高速、高精度、重载、结构上要求剖分等场合下,滑动轴承就显示出它的优异性能,对于在低速但有冲击的条件下工作的机器,也采用滑动轴承。图3-14所示为一整体式滑动轴承,它由轴承座和整体轴瓦等组成。轴承合金又称巴氏合金。铅锑轴承合金的各种性能与锡锑轴承合金接近,但这种材料较脆,不宜承受较大的冲击载荷,一般用于中速、中载的轴承。......
2023-06-16

图9-29实验测试平台和演示器设置PU和OFP代理是在VMware ESXi V5.1创建的虚拟机阵列上实现的,VMware ESXi V5.1运行在IBM X3650服务器上。如图9-30和图9-30所示,10.108.67.21、10.108.50.74和10.108.49.14分别表示RC、PC和OC的IP地址,而10.108.49.23和10.108.49.24分别表示相关的OF-BVOS的IP地址。特征请求消息负责通过定期查询BVOS来监视当前状态。在完成RIP后,OC和RC提供SP,并通过流修改消息分配射频来控制相应的节点。图9-30MDRI的消息序列的Wireshark捕获......
2023-06-19
进入零件设计工作台操作参见1.1。单击工具栏内的图标,标注并调整内圆的直径尺寸为60mm,外圆的直径尺寸为100mm。多草图拉伸生成两个圆柱体单击工具栏内的图标,出现对话框。单击对话框内的按钮,生成主动轴零件。绘制矩形草图选中主动轴的底面。单击工具栏内的图标,将两条垂直线上下两端用水平线联接起来,如图13-1所示。单击对话框内的选项卡,在栏内填上零件的名称“主动轴”。在左边的模型树选中零件主动轴。......
2023-07-01
相关推荐