而粘接部位的受力主要与粘接接头的形式有关。图10-14所示为生产中常见的粘接接头形式。式(2.5)中,U 为R 上的电压有效值,有图10-15 各类接头形式的比较a)平板接头 b)角接接头 c)圆柱及圆管接头2.粘接强度的计算粘接强度可参照表10-7中所列的公式进行计算。表10-7 粘接强度的计算电源侧的输入功率为功率因数为表10-8 点焊、胶接及胶接-点焊接头强度比较......
2023-06-23
销钉接头是最基本的连接类型,销钉接头的连接元件可以绕轴线转动,但不能沿轴线平移。
销钉接头需要一个轴对齐约束,还需要一个平面配对(对齐)约束或点对齐约束,以限制连接元件沿轴线的平移。
销钉接头提供一个旋转自由度,没有平移自由度。
举例说明如下:
Step1.将工作目录设置至D:\proewf5.2\work\ch09.02\mech1_pin,然后打开装配模型mech_pin.asm。
Step2.在图9.2.2所示的模型树中,选取零件 ,右击,从弹出的图9.2.3所示的快捷菜单中选择
,右击,从弹出的图9.2.3所示的快捷菜单中选择 命令。
命令。
Step3.创建销钉接头。
①在操控板的约束集列表中选择 选项,此时系统显示图9.2.4所示的装配操控板。
选项,此时系统显示图9.2.4所示的装配操控板。
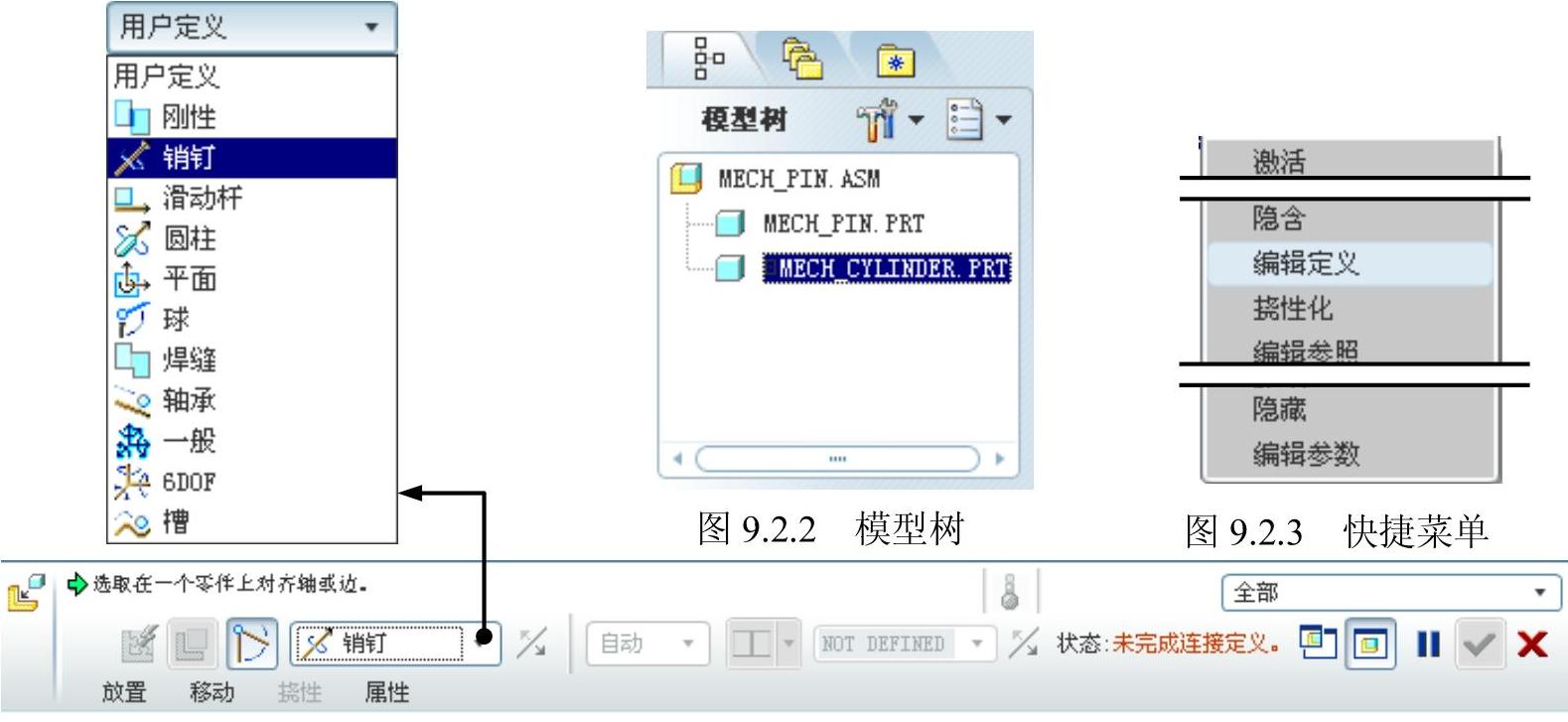
图9.2.4 装配操控板
②单击操控板中的 按钮,在弹出的界面中可看到,销钉连接包含两个预定义的约束:
按钮,在弹出的界面中可看到,销钉连接包含两个预定义的约束: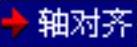 和
和 。
。
③为“轴对齐”约束选取参照。分别选取图9.2.5中的两条轴线(元件MECH_PIN.PRT和MECH_CYLINDER.PRT的中心轴线)。
图9.2.5 销钉(Pin)接头
④为“平移”约束选取参照。分别选取图9.2.5中的两个平面(元件MECH_PIN.PRT和MECH_CYLINDER.PRT的端面)以将其对齐,从而限制连接件沿轴线平移。。
Step4.单击操控板中的 按钮,完成销钉接头的创建。
按钮,完成销钉接头的创建。
说明:按住Ctrl和Alt键,同时按住鼠标右键并拖动鼠标,可以平移元件;按住Ctrl和Alt键,同时按住鼠标中键并拖动鼠标,可以旋转元件。添加约束时,可以根据需要移动元件;添加完毕后,可以移动元件来查看自由度。
有关Pro/ENGINEER中文野火版5.0高级应用教程的文章

而粘接部位的受力主要与粘接接头的形式有关。图10-14所示为生产中常见的粘接接头形式。式(2.5)中,U 为R 上的电压有效值,有图10-15 各类接头形式的比较a)平板接头 b)角接接头 c)圆柱及圆管接头2.粘接强度的计算粘接强度可参照表10-7中所列的公式进行计算。表10-7 粘接强度的计算电源侧的输入功率为功率因数为表10-8 点焊、胶接及胶接-点焊接头强度比较......
2023-06-23

5)在传递相同功率的情况下,液压传动装置的体积小,重量轻,结构紧凑。综上所述,液压传动的优点是十分突出的,其缺点将随科学技术的发展而逐渐得到克服。......
2023-06-24

链轮具有特殊形状的轮齿,通过轮齿与链节的啮合来传递运动和动力。 摩擦损失小,传动效率高,润滑良好的链传动的效率达0.98。齿形链传动与套筒滚子链传动相比,运转平稳,噪声小,承受冲击载荷的能力高,但其重量大,价格贵,一般用于高速重载传动。外链板与销轴用过盈配台连接,构成外链节,内链板与套筒也用过盈配合固结,构成内链节。套筒与销轴间为间隙配合,内链板与外链板依次交替铰接可以相对转动,使链条具有挠性。......
2023-06-16

涤纶的后整理阻燃具有工艺简单、适用面广、灵活适应市场等优点,存在的缺点是阻燃剂用量大、有的耐久性不佳等。但因其具有灵活简便的优点,后整理方法仍是目前获得阻燃涤纶的重要方法之一[115]。图1-10阻燃剂DOPO-ITA-EG结构上述有关阻燃PET的研究和工业品表明,DOPO及其衍生物采用共聚、共混和后整理等方式用于PET阻燃处理,都可赋予其优异的阻燃性能。......
2023-06-26

下面以最常见的“天圆地方”接头为例,说明这类变形接头展开图的画图过程。如图10-14所示,连接圆形管道和方形管道的“天圆地方”接头由四个三角形平面和四个部分圆锥面共同组成。为了作图方便,将圆口分为相应等份,图中为12等份。图10-14变形接头表面展开依次画出各三角形实形,并将圆口光滑连成曲线,即可得到“天圆地方”接头的展开图。......
2023-06-28

联合基础主要适用于基础根开较小且基坑难以开挖,板式基础上拔土体重叠的软弱土塔位。联合基础的优点是底板面积大,靠基础底板上面的纵、横向加筋的混凝土梁承担由基础上拔力、下压力和水平力引起的弯矩,底板与纵、横加劲肋配筋,整体性好。联合基础的缺点是基础材料用量较大,施工较为烦琐,设计不易成系列。......
2023-06-29
倒装芯片焊点接头加工时,首先进行UBM层的沉积,随后在UBM层上电镀形成厚的焊料凸点。随后,低温回流将两部分焊料连接在一起,形成一个复合焊料接头。在倒装芯片器件中,37Pb63Sn焊料的典型回流条件是:保持氮气气氛,峰值温度为220℃,停留时间为90 s。图4.2通过丝网印刷和结块在焊盘上制备共晶焊料的工艺步骤图4.3一对倒装芯片复合焊料接头的横截面示意......
2023-06-20
机器人最常用的声音传感器是麦克风,它是能够识别声音声强大小的一种传感器,用来接收声波,显示声音的振动图像等。电容式的声音传感器因为需要电流才能变成信号,需要电源,所以比动圈式使用成本高。图5-12麦克风电路图声音传感器可以用于机器人控制,其发出的信号经过处理后,可以当作控制信号给机器人,如拍一下手,机器人就开始运动。......
2023-06-26
相关推荐