正弦波永磁同步电动机矢量控制一般都采用按转子磁链定向的方法,因为转子位置θd用光电编码器可以方便地检测,并且在式中若令定子电流的励磁分量isd=0,Ψsd=Ψr,则电动机转矩为Te=npΨrisq=npΨris 式表明,在令定子电流的励磁分量isd=0时,定子电流将只含转矩分量isq,is=isq,控制定子电流就可以控制电动机转矩。图6.21 永磁同步电动机按转子位置定向的矢量控制系统......
2025-09-29
1.网侧变流器按电压定向控制
将同步旋转dq坐标系的d轴定向在电网电压矢量us的方向上时,如图8.13所示,有ugd=us,ugq=0。
在同步旋转dq坐标系上,ugd、ugq和igd、igq都是直流,电网电压矢量us的幅值 ,因此式(8.29)可写为
,因此式(8.29)可写为
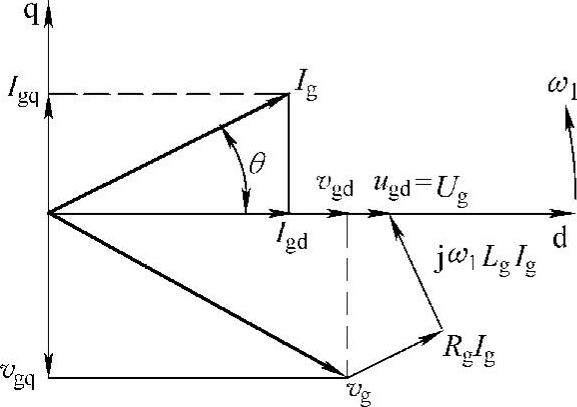
图8.13 网侧变流器稳态电压矢量
2.网侧变流器按电压定向控制的稳态特性
在变流器稳态运行时,方程式(8.31)各导数项为0,若忽略电阻Rg,可得同步旋转坐标系上网侧变流器的方程为

式中,vd=SdUdc,vq=SqUdc,有

即

根据电压空间矢量调制原理,如果不作过调制,在幅值守恒原则变换下有
因此

在igd、igq为0时,Udc=3Ug,即电容电压为网侧线电压。若网侧变流器输入交流电中包含超前分量(igq>0),则直流母线电压Udc较高,若网侧变流器输入交流电中包含滞后分量(igq<0),则直流母线电压Udc较低。当网侧功率因数为1时(igq=0,θg=0),输出负载电流ig越大,要求的直流母线电压越高,即使空载,直流母线电压也不会低于交流侧电网线电压幅值,因此需要由Boost电路升压。(https://www.chuimin.cn)
按发电机原则规定的电流正方向和幅值恒定的坐标变换原则,网侧变流器向电网输出的有功功率和无功功率分别为

在d轴定向于电网电压矢量的同步旋转坐标系上,忽略损耗,则有

式(8.36)表明,在功率以向电网输出为正方向时,Pg<0,表示网侧变流器工作于整流状态,电能从网侧流向电容C,Pg>0,表示网侧变流器工作于逆变状态,电能从电容C回馈到网侧;而Qg>0,表示网侧变流器呈容性,从电网吸收超前的无功功率,Qg<0,表示网侧变流器呈感性,从电网吸收滞后的无功功率。
忽略各种损耗后,网侧变流器直流侧和交流侧有功功率平衡关系为

当交流侧输入的功率Pg大于直流侧负载消耗的功率Pload时,多余的功率会使直流母线电压升高,反之则使之降低,因此只要能控制交流侧输入的有功功率就可以保持直流母线电压的稳定。由式(8.32),忽略电阻时可得

将式(8.38)代入式(8.36)得
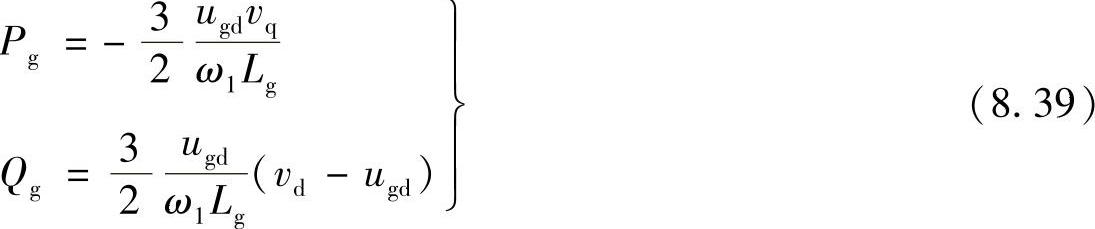
式(8.39)表明,调节网侧电压矢量ugd和ugq,可以调节变流器从电网吸收的有功功率和无功功率,从而使变流器在不同的有功和无功下实现四象限运行。
3.基于d轴电网电压定向的网侧变流器控制系统
基于d轴电网电压定向的网侧变流器电压、电流闭环控制系统如图8.14所示。图中,检测网侧交流电压uga、ugb、ugc和电流iga、igb、igc,经坐标变换得到dq坐标系上的电压ugd、ugq和电流igd、igq,系统用锁相环PLL检测电网电压定向角φ,用于坐标系的旋转变换。系统的控制目标是直流侧电压Udc和交流侧功率因数,因此以直流侧电压为给定值U∗dc,U∗dc与实测电容电压Udc比较,经电压调节器(AUR)得到保持电容电压不变时的变流器交流侧电流的给定值i∗gd′,由式(8.37),从功率平衡要求变流器输出侧的电流为 ,变流器交流侧d轴电流给定为
,变流器交流侧d轴电流给定为 。变流器交流侧q轴电流给定ig∗∗可根据对无功功率的给定要求设定[见式(8.36)]。系统的电流内环根据ig∗∗、ig∗∗调节变流器交流侧电压的dq轴分量,并对vd∗∗和vq∗∗进行了进线电感Lg的交叉电压补偿[见式(8.31)]。以vd∗∗vq∗∗经SVPWM控制网侧变流器开关,使网侧变流器交流侧三相电压和电流按转子侧变流器对电流iload的要求和交流侧无功的要求进行调节。
。变流器交流侧q轴电流给定ig∗∗可根据对无功功率的给定要求设定[见式(8.36)]。系统的电流内环根据ig∗∗、ig∗∗调节变流器交流侧电压的dq轴分量,并对vd∗∗和vq∗∗进行了进线电感Lg的交叉电压补偿[见式(8.31)]。以vd∗∗vq∗∗经SVPWM控制网侧变流器开关,使网侧变流器交流侧三相电压和电流按转子侧变流器对电流iload的要求和交流侧无功的要求进行调节。
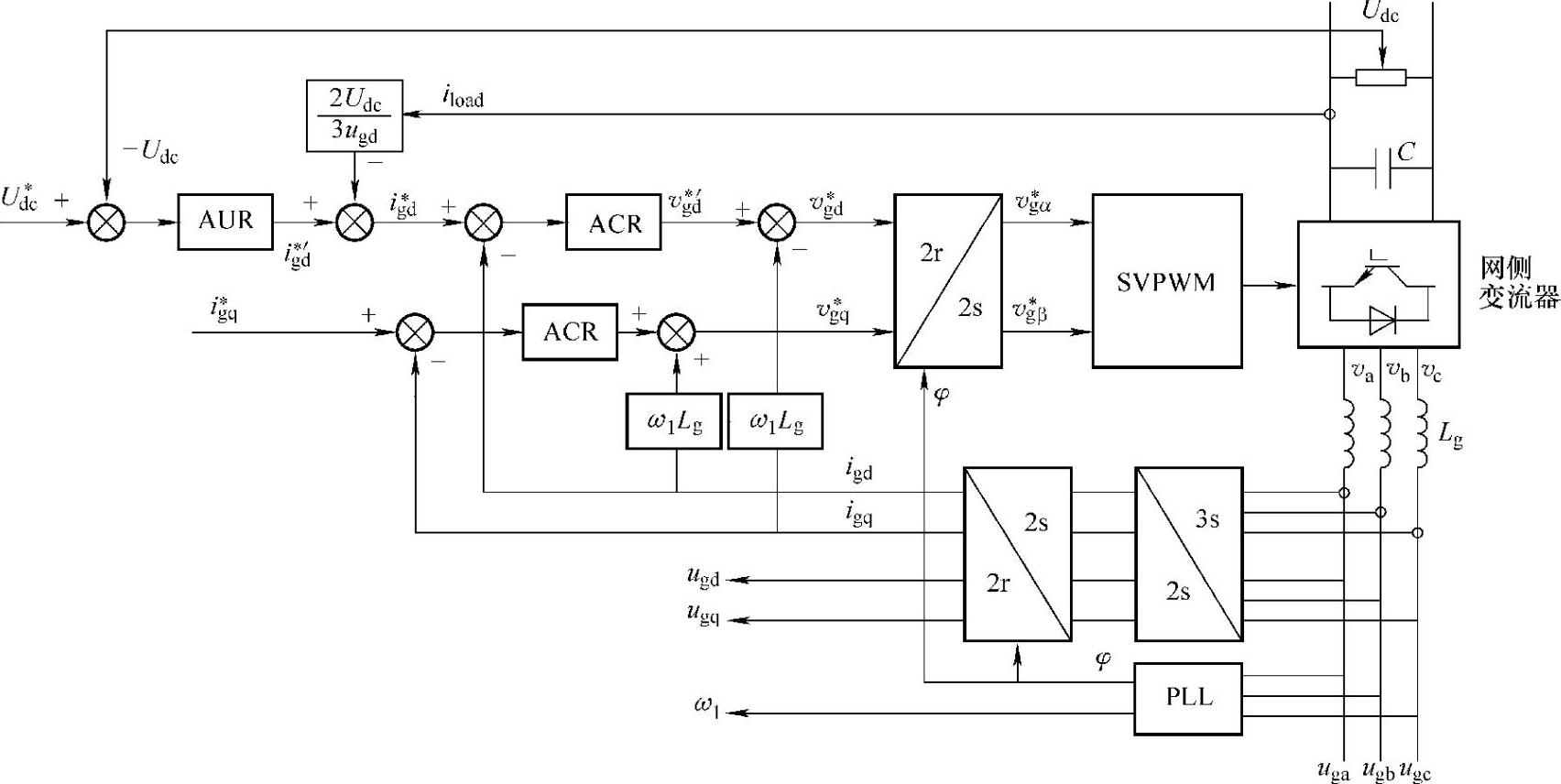
图8.14 基于d轴电网电压定向的网侧变流器电压、电流闭环控制系统
相关文章

正弦波永磁同步电动机矢量控制一般都采用按转子磁链定向的方法,因为转子位置θd用光电编码器可以方便地检测,并且在式中若令定子电流的励磁分量isd=0,Ψsd=Ψr,则电动机转矩为Te=npΨrisq=npΨris 式表明,在令定子电流的励磁分量isd=0时,定子电流将只含转矩分量isq,is=isq,控制定子电流就可以控制电动机转矩。图6.21 永磁同步电动机按转子位置定向的矢量控制系统......
2025-09-29

例4.2建立磁链开环转差型矢量控制系统模型并进行仿真分析。图4.23 转差频率控制的矢量控制系统仿真模型为了便于比较,转差频率矢量控制系统电动机参数与磁链闭环矢量控制系统模型相同,ASR取值也相同,其他模块参数见表4.2。图4.24 带转矩内环的转速、磁链闭环矢量控制系统仿真结果图4.25 定子磁链轨迹图4.26 转矩-转速特性电动机转速波形反映了电动机起动时,转速从0上升到1400r/min和下降到1000r/min的运行过程。......
2025-09-29

在矢量控制系统中磁链是通过模型观测的,实际上电动机转速也可以通过模型来观测,以转速观测模型代替转速传感器,可以减少硬件开支,减少安装和维护的麻烦。由异步电动机在二相静止坐标系上电压方程[见式],在方程的第3、4行中包含了转速ω项,因此从第3行可得上式中与ω有关的都是转子参数,不易观测,需要变换为定子参数。以转速观测代替测速发电机和光电编码器即可组成无转速传感器的矢量控制系统。......
2025-09-29

2)在开关状态SASBSC=110时,即K1、K3、K2接通,,,将uA、uB、uC代入式(5.1)得图5.2 三相逆变器电压空间矢量式(5.4)表明,逆变器开关状态为110时uS2的幅值为2,方向为。依次类推,可得逆变器六种开关工作状态下的电压空间矢量uS1~uS6,电压空间矢量uS1~uS6的幅值相同,方向依次相隔60°,如图5.2所示。开关状态000和111,即下桥臂开关K4、K6、K2或上桥臂开关K1、K3、K5同时导通,空间电压矢量uS7=uS8=0,在坐标原点。......
2025-09-29
伺服控制系统是一种能够跟随输入指令信号进行控制的系统,也称随动控制系统。位置伺服控制系统用于机械的定位和定向控制,机器人、数控机床、雷达跟踪、舰船操舵等都大量使用电动机控制的位置伺服系统。位置闭环控制与调速系统的不同是其有位置检测和位置控制器。本章主要介绍步进电动机位置开环控制原理和伺服电动机位置闭环控制系统的组成和控制要求。......
2025-09-29

永磁同步电动机按转子位置定向的矢量控制系统仿真模型如图6.22所示,各模块与原理图对应。选择永磁同步电动机模块的励磁类型为正弦波sinousoidal,电动机转速、电流和转角信号都取自永磁同步电动机的检测模块。图6.23b所示为定子电流的转矩分量isq和励磁分量isd,励磁分量isd接近为0,系统实现了电动机转矩最大化控制。图6.23e所示为电动机转矩波形,其中TL为给定的负载转矩,Te为电磁转矩响应。图6.23 永磁同步电动机调速系统仿真结果(续)......
2025-09-29

图4.12 采用电压型电流跟踪逆变器的带转矩内环的转速、磁链闭环矢量控制系统系统检测出异步电动机转速ω和三相电流后,由电流变换和磁链观测模块计算图4.12所示系统的定子电流的转矩分量ist、转子磁链Ψr和定向角φ,并按式计算电动机的转矩反馈信号Te。图4.13 采用SPWM逆变器的带转矩内环的转速、磁链闭环矢量控制系统......
2025-09-29

按气隙磁场定向的可控励磁同步电动机矢量控制系统如图6.14所示。系统采用转速和电流的双闭环控制以及气隙磁链的开环控制,在基频以下保持气隙磁通不变,基频以上进行弱磁控制。图6.14 可控励磁同步电动机矢量控制系统1.转子励磁控制气隙磁通给定环节根据转速确定气隙磁通给定值Ψδ,由式计算气隙磁链电流给定值,气隙电流励磁分量Ifm=Iδ-Ism。对于定子电流的励磁分量ism,系统采用给定方式。图6.15 同步电动机矢量与相量关系......
2025-09-29
相关推荐