图4.8 二相静止坐标系上的转子磁链观测模型的计算框图2.按磁场定向的二相旋转坐标系上转子磁链观测模型根据矢量控制方程式和式可以得到在二相旋转坐标系上按转子磁链定向的转子磁链观测模型,如图4.9所示。图4.9 二相旋转坐标系上按转子磁链定向的转子磁链观测模型......
2025-09-29
双馈发电机转子侧变流器按磁链定向的矢量控制系统如图8.11所示。图中,风力双馈发电机功率输出由转子励磁控制,转子电压和电流控制了双馈发电机定子输出的有功功率和无功功率。由于风力发电系统风力机输出的最佳功率Popt与转速有关,因此系统首先检测发电机转速ωr,然后查表得到在当前风速下的最佳功率Popt,并以Popt作为发电机输出有功功率的给定值Ps∗。发电机输出的无功功率给定值Qs∗根据电网对发电机输出无功的要求设定。
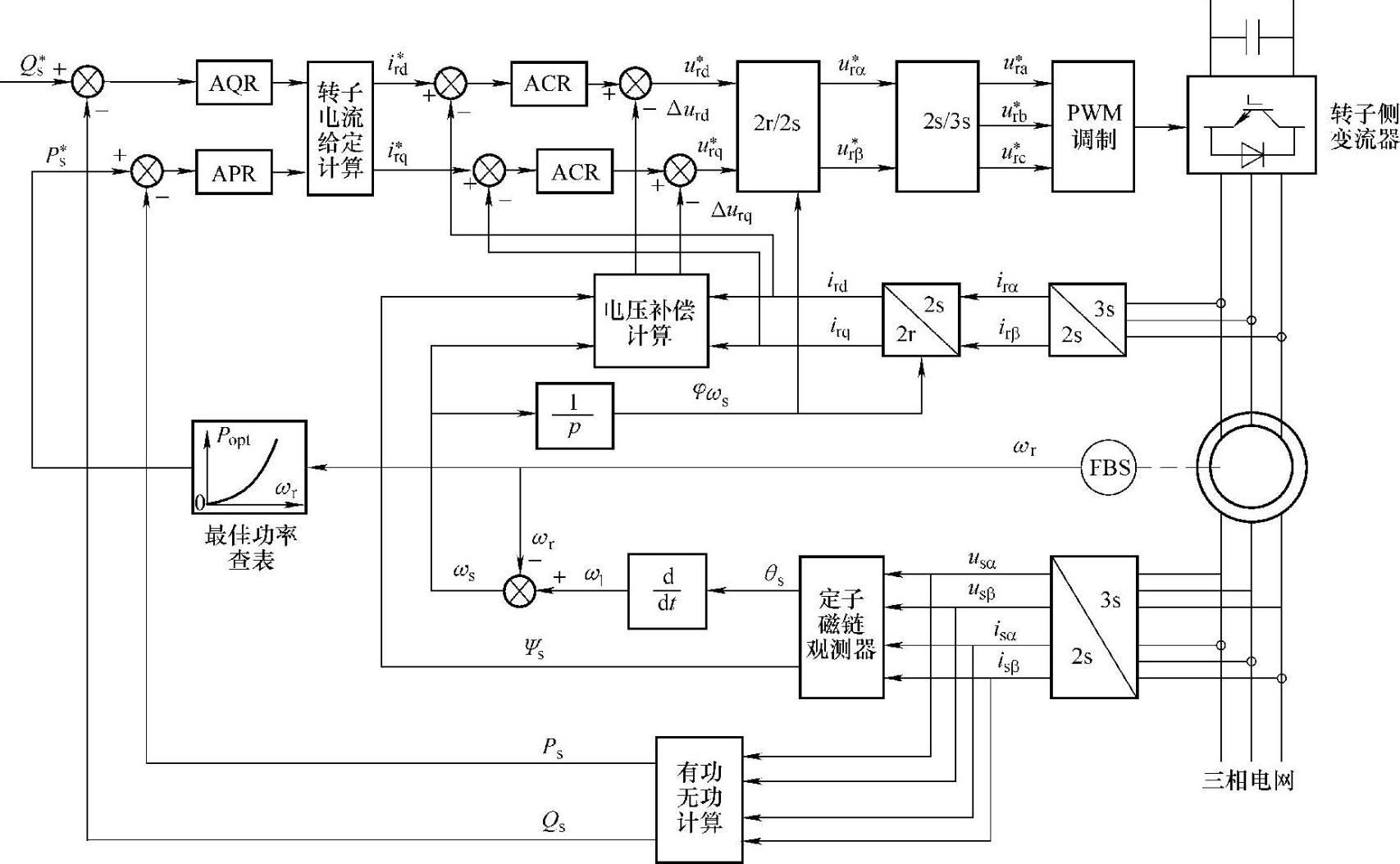
图8.11 双馈发电机转子侧变流器按定子磁链定向的矢量控制系统(https://www.chuimin.cn)
系统检测发电机定子侧三相电压和电流,经3s/2s静止变换得到αβ坐标系上的电压usα、usβ和电流isα、isβ,然后由定子磁链观测器计算定子磁链Ψs幅值和位置角θs[见式(8.16)、式(8.17)]。θs的微分是定子磁链旋转角频率ω1, ,ω1与检测转子ωr之差为转差角频率,也是转子电压电流的角频率,ωs=ω1-ωr。ωs经积分环节得φωs=∫ωsdt,φωs是定向角,用于二相旋转坐标系的变换,使变换后的转子三相电压信号u∗ra、u∗rb、u∗rc的频率为ωs。根据定子电压usα、usβ和电流isα、isβ,可计算定子的有功功率Ps和无功功率Qs的反馈信号[见式(8.11)]。
,ω1与检测转子ωr之差为转差角频率,也是转子电压电流的角频率,ωs=ω1-ωr。ωs经积分环节得φωs=∫ωsdt,φωs是定向角,用于二相旋转坐标系的变换,使变换后的转子三相电压信号u∗ra、u∗rb、u∗rc的频率为ωs。根据定子电压usα、usβ和电流isα、isβ,可计算定子的有功功率Ps和无功功率Qs的反馈信号[见式(8.11)]。
双馈发电机转子侧PWM变流器的控制部分由功率给定Ps∗、Qs∗,有功和无功调节器(APR、AQR),转子电流给定计算,电流调节器(ACR),坐标变换环节(2r/2s、2s/3s)和PWM调制等环节组成。APR、AQR根据功率偏差经PI调节器控制转子电流给定值i∗rd、i∗rq。从两个ACR得到在dq坐标系上的转子电压给定值u∗rd、u∗rq,u∗rd和u∗rq,考虑了为消除转子电压与电流交叉耦合的补偿项[见式(8.20)]。ur∗d、ur∗q经2r/2s和2s/3s变换后得到转子三相电压给定值u∗ra、u∗rb、u∗rc,u∗ra、u∗rb、u∗rc信号经SPWM调制驱动转子侧PWM变流器,使转子电压和电流按需要的定子有功和无功调节。
相关文章

图4.8 二相静止坐标系上的转子磁链观测模型的计算框图2.按磁场定向的二相旋转坐标系上转子磁链观测模型根据矢量控制方程式和式可以得到在二相旋转坐标系上按转子磁链定向的转子磁链观测模型,如图4.9所示。图4.9 二相旋转坐标系上按转子磁链定向的转子磁链观测模型......
2025-09-29

例4.2建立磁链开环转差型矢量控制系统模型并进行仿真分析。图4.23 转差频率控制的矢量控制系统仿真模型为了便于比较,转差频率矢量控制系统电动机参数与磁链闭环矢量控制系统模型相同,ASR取值也相同,其他模块参数见表4.2。图4.24 带转矩内环的转速、磁链闭环矢量控制系统仿真结果图4.25 定子磁链轨迹图4.26 转矩-转速特性电动机转速波形反映了电动机起动时,转速从0上升到1400r/min和下降到1000r/min的运行过程。......
2025-09-29

由模型[见式]第1、2行可得usα=isα+Lmpirαusβ=isβ+Lmpirβ将式的irα、irβ代入上式,并令σ=1-L2m/LsLr,整理可得所以由式组成的转子磁链计算流程如图4.10所示。与电流模型法相比,电压模型法只涉及定子电阻,定子电阻易于测量并且受温度影响较小,但是在低速时,定子电阻压降的影响增大,定子电阻压降对磁链计算的影响增加,因此电压模型较适合于高速范围的观测。......
2025-09-29

图4.14 转速、磁链闭环矢量控制系统仿真模型1.仿真模型图4.12所示带转矩内环的转速、磁链闭环矢量控制系统仿真模型如图4.14所示。图4.18 定子磁链轨迹图4.19 转矩-转速特性......
2025-09-29

正弦波永磁同步电动机矢量控制一般都采用按转子磁链定向的方法,因为转子位置θd用光电编码器可以方便地检测,并且在式中若令定子电流的励磁分量isd=0,Ψsd=Ψr,则电动机转矩为Te=npΨrisq=npΨris 式表明,在令定子电流的励磁分量isd=0时,定子电流将只含转矩分量isq,is=isq,控制定子电流就可以控制电动机转矩。图6.21 永磁同步电动机按转子位置定向的矢量控制系统......
2025-09-29

图4.12 采用电压型电流跟踪逆变器的带转矩内环的转速、磁链闭环矢量控制系统系统检测出异步电动机转速ω和三相电流后,由电流变换和磁链观测模块计算图4.12所示系统的定子电流的转矩分量ist、转子磁链Ψr和定向角φ,并按式计算电动机的转矩反馈信号Te。图4.13 采用SPWM逆变器的带转矩内环的转速、磁链闭环矢量控制系统......
2025-09-29

永磁同步电动机按转子位置定向的矢量控制系统仿真模型如图6.22所示,各模块与原理图对应。选择永磁同步电动机模块的励磁类型为正弦波sinousoidal,电动机转速、电流和转角信号都取自永磁同步电动机的检测模块。图6.23b所示为定子电流的转矩分量isq和励磁分量isd,励磁分量isd接近为0,系统实现了电动机转矩最大化控制。图6.23e所示为电动机转矩波形,其中TL为给定的负载转矩,Te为电磁转矩响应。图6.23 永磁同步电动机调速系统仿真结果(续)......
2025-09-29

在矢量控制系统中磁链是通过模型观测的,实际上电动机转速也可以通过模型来观测,以转速观测模型代替转速传感器,可以减少硬件开支,减少安装和维护的麻烦。由异步电动机在二相静止坐标系上电压方程[见式],在方程的第3、4行中包含了转速ω项,因此从第3行可得上式中与ω有关的都是转子参数,不易观测,需要变换为定子参数。以转速观测代替测速发电机和光电编码器即可组成无转速传感器的矢量控制系统。......
2025-09-29
相关推荐