步进电动机又称脉冲电动机或阶跃电动机。步进电动机的机理是基于最基本的电磁铁作用。图6-39步进电动机系统框图无刷,电动机本体部件少,可靠性高。10)运行频率运行频率是指拖动一定负载使频率连续上升时,步进电动机能不失步运行的极限频率。图6-43矩频特性图6-44惯频特性14)单步响应单步响应是指步进电动机在带电不动......
2023-06-26
步进电动机驱动电路是将脉冲信号变换成具有一定功率的电流脉冲,一般由脉冲分配、功率放大两部分组成,如图7.6所示,对驱动电路要求是能提供一定幅值、前后沿较好的脉冲电流。
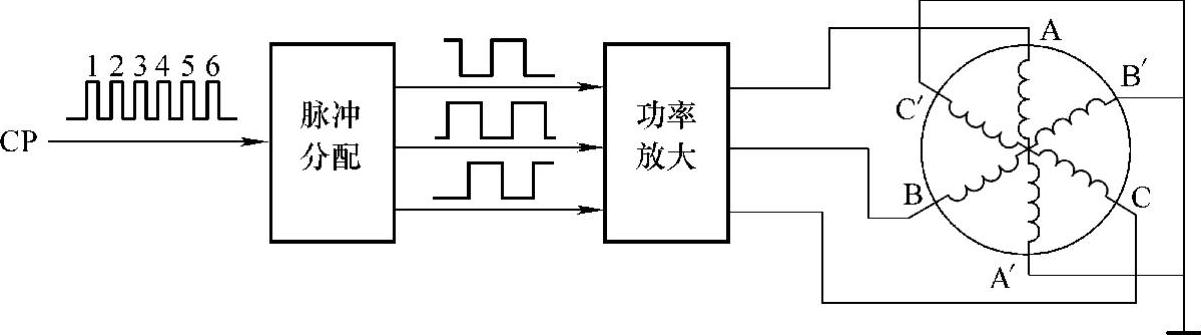
图7.6 步进电动机控制电路原理
1.脉冲分配
步进电动机绕组随相数不同通电方式有多种,见表7.2,脉冲分配的要求不同,见表7.3,实现脉冲分配的方法有三种。
1)由双稳态触发器组成环形脉冲分配器。图7.7所示为由三个双稳态触发器C1/C2/C3组成的三相六拍环形脉冲分配器。

图7.7 双稳态触发器组成的三相六拍环形脉冲分配器
2)采用专用环形分配器模块。现在市售步进电动机专用模块很多,功能齐全,使用方便。这些模块有用于二相步进电动机的L297、PMM8713,用于三相步进电动机的CH250和用于五相步进电动机的PMM8714等。
3)采用软件,利用查表或计算实现脉冲分配。表7.3所列为三相六拍脉冲代码,按正、反转要求顺次提取代码,通过接口输出脉冲,改变读取一次数据的时间间隔,可以控制步进电动机转速。软件循环脉冲分配不需要硬件模块,成本低,尤其对多相步进电机更是方便。
表7.2 反应式步进电动机通电方式
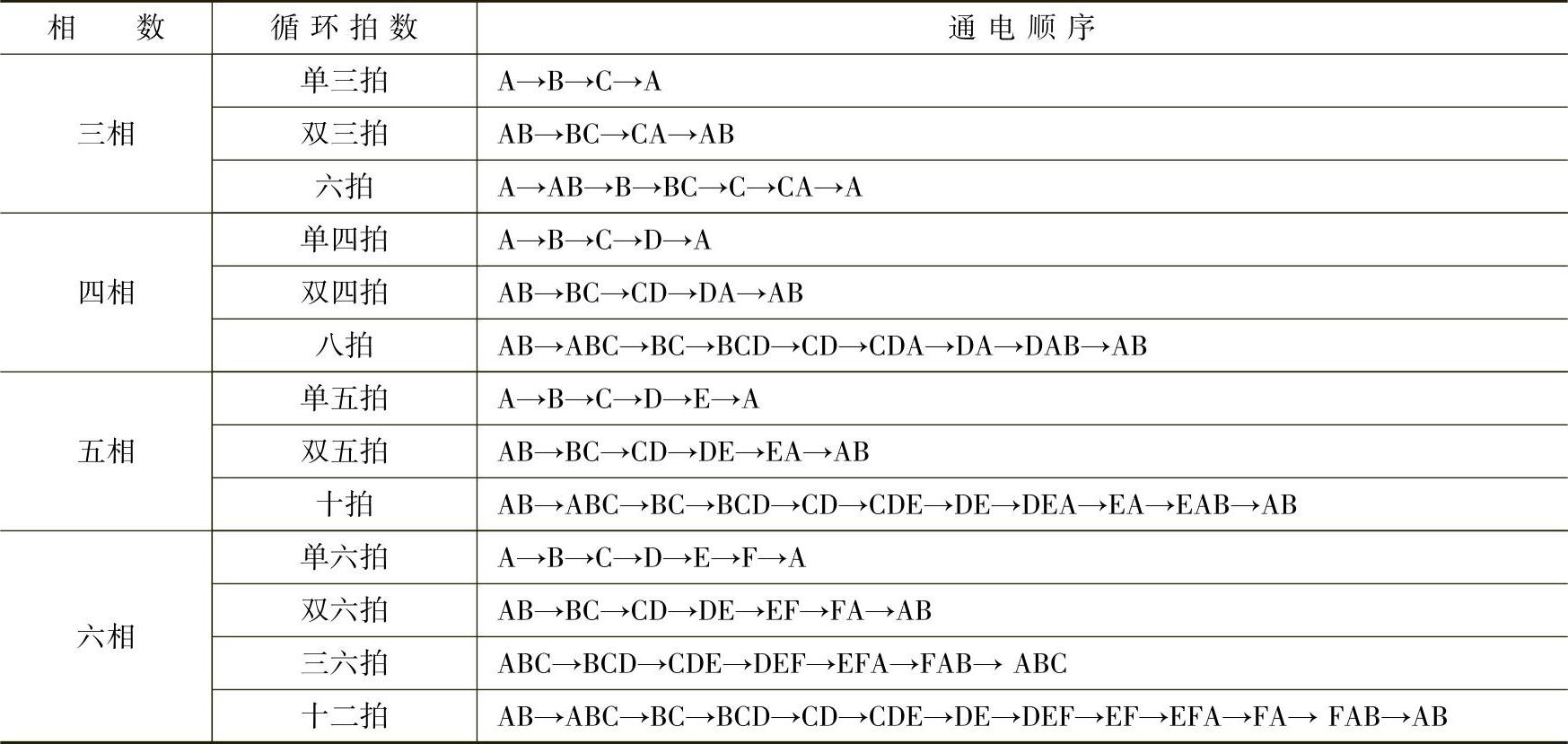
表7.3 三相六拍脉冲分配

2.功率驱动
计算机输出脉冲和环形分配器模块输出脉冲功率很小,不能满足步进电动机电压和电流要求,需要进行功率放大。由于现在脉冲分配和功率放大都集成在步进电动机控制器中,因此这里只是扼要介绍一些驱动电路的特点,主要是步进电动机定子绕组有电感,电感在通电时会影响电流的上升速度,在断电时会激发高的感应电动势,需要有保护措施。
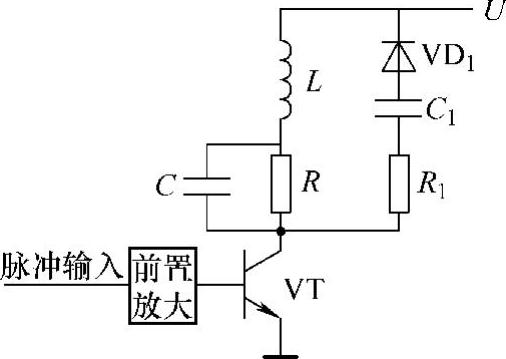
图7.8 单电压驱动电路
1)单电压驱动电路。单电压驱动电路如图7.8所示。图中,L是步进电动机一相绕组,R为外串限流电阻,由功率开关管VT控制绕组L的通电和断电。一相绕组的时间常数为L/R,为了提高电流的上升率,在电阻R上并联了电容C。电阻R1、电容C1和二极管VD1组成过电压吸收电路,在VT关断时为绕组L提供放电回路,防止产生关断过电压。单电压驱动电路只用一路电源U,结构简单,缺点是绕组通电时电流上升速度慢,高频时负载能力低。
2)高、低压驱动电路。高、低压驱动电路采用两路电源供电,如图7.9所示,高压U1一般为80V,低压U2为步进电动机额定电压,一般为20V以下。在输入脉冲信号来到时,VT1和VT2同时导通,步进电动机绕组L得电,电压为U1,在高压U1作用下可以提高电流上升率;当电流上升到规定值时,采样电阻Rc上的电压信号经高压控制电路使VT1关断(VT1导通时间为tH),绕组L改由低压U2供电。高、低压驱动电路有较陡的电流前沿,在较宽的频率范围内有较大的电流,能产生较大的稳定的转矩。
3)恒流斩波驱动电路。恒流斩波驱动电路如图7.10所示,仍采用双电源驱动,但是绕组L不串电阻,因此VT1和VT2导通时电流的上升率高。当电流达到规定值时,采样电阻Rc上的反馈信号经整形、放大后使VT1关断,电路由低压电源供电。在低压U2供电时,绕组电流下降,当电流降到额定值时,采样电阻Rc反馈信号使整形电路无信号输出,输入脉冲经控制门和高压前置放大器使VT1又导通。如此反复作用,VT1的导通关断(斩波)使绕组电流近似恒定。恒流斩波驱动绕组电流上升快、边沿陡,响应好,功耗小,输出转矩稳定,并可减少步进电动机的共振现象发生。
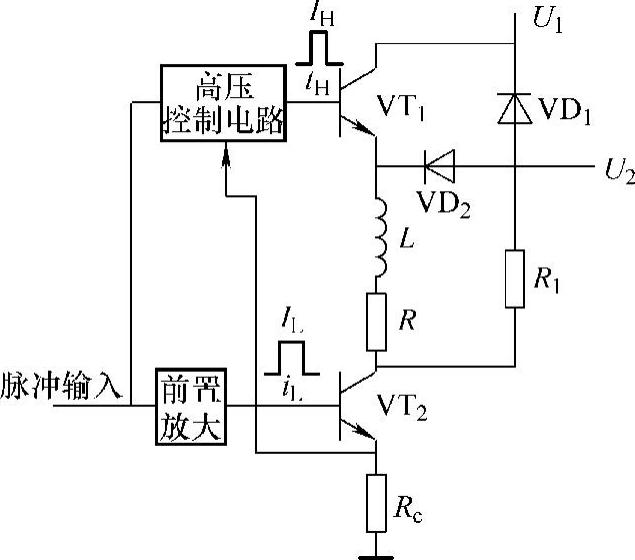
图7.9 高、低压驱动电路

图7.10 恒流斩波驱动电路
有关电机运动控制系统的文章

步进电动机又称脉冲电动机或阶跃电动机。步进电动机的机理是基于最基本的电磁铁作用。图6-39步进电动机系统框图无刷,电动机本体部件少,可靠性高。10)运行频率运行频率是指拖动一定负载使频率连续上升时,步进电动机能不失步运行的极限频率。图6-43矩频特性图6-44惯频特性14)单步响应单步响应是指步进电动机在带电不动......
2023-06-26

叙事型构图聚焦于正在发生的事情,着重表达角色性格或人物关系。两张不太相干的图片连在一起,人就能想象出隐藏在背后的故事,这种手法在电影中称为“蒙太奇”。蒙太奇对模型摄影构图有很大的借鉴意义,它可以帮助摄影师讲故事,让人感觉仿佛置身于模型场景之中。电影运用了一系列镜头来表现这一事件,先是一辆汽车高速驶来的镜头,然后是男主角神情慌张举手保护自己的特写,最后是男主角滚入车下的画面。......
2023-06-23

步进电动机除相数、额定电压和电流外还有以下主要参数:1)步距角和静态步距误差。最高工作频率fmax是步进电动机保证不丢步的极限工作频率,fmax决定了步进电动机的最高转速。图7.4 加、减速特性曲线图7.5 矩频特性步进电动机的特性除步距角外,其他都与步进电动机的驱动电源有很大关系,驱动电源性能好,步进电动机的性能才能有保证。表7.1 反应式步进电动机参数......
2023-06-19
步进电动机定子有多相绕组,各相绕组依次通电。图7.3所示为三相反应式步进电动机原理,其定子有六个极,每极都装有控制绕组,每两个相对的极组成一相,六个极组成三相。步进电动机的绕组通电和断电一般由环形脉冲分配器控制。图7.3 步进电动机原理步进电动机每改变一次通电方式称为一拍,每拍通电转子转过的角度称为步距角θs。......
2023-06-19

步进电动机采用直流电源供电。上述分析中的步进电动机步距角为30°。步进电动机驱动控制系统结构如图4-15所示。步进驱动控制面板包含步进电动机的驱动信号,与运动控制器的接口、方向和脉冲等控制信号接口。步进电动机一般用于开环伺服系统,由于没有位置反馈环节,故位置控制的精度由步进电机和进给丝杠等来决定。开环步进电动机控制系统框图如图4-16所示。......
2023-06-23

选用步进电动机通常希望步进电动机输出转矩大,起动和运行频率高,步距误差小,性价比高,但是这些要求往往是矛盾的,需要综合考虑。在脉冲当量确定后,可据此选择步进电动机的步距角和传动机构的传动比。步进电动机的步距角理论上是固定的,实际上存在误差,一般应将步进电动机的步距误差、负载引起的定位误差和传动机构的误差等都全部考虑在内,使总的误差小于机械允许的定位误差。......
2023-06-19

伺服电动机都带有这种反馈控制的机制。伺服电动机是将输入的电压信号转换为转矩和转速以驱动控制对象。交流伺服电动机也是无刷电动机,可分为同步和异步电动机。......
2023-06-26
炉区的主要设备与设施为装出钢机、装出料炉门、步进梁式加热炉本体、出料机、空煤气管道系统及放散系统、水冷系统、排烟系统、操作及检修平台、汽化冷却系统以及仪表电控系统等。步进梁的原始位置设在后下位。图9-2 步进梁矩形轨迹运行图......
2023-06-15
相关推荐