接触器6种特性参数中,影响较大的几项介绍如下。4)和短路保护电器的协调配合接触器和短路保护电器的协调配合试验应由制造厂进行。5)额定工作制接触器有4种标准工作制,具体如下。断续周期工作制时的负载因数标准值为15%、25%、40%和60%。电气控制回路有电流种类、额定频率、额定控制电路电压Uc和额定控制电源电压Us等参数。在多数情况下,这2个电压是一致的。......
2023-06-30
1)步距角和静态步距误差。步距角是决定步进电动机开环伺服系统脉冲当量的重要参数,一般数控机床常见的反应式步进电动机的步距角为0.5°~3°,步距角越小加工准确度越高。静态步距误差是指理论步距角与实际步距角之间的误差,以分(′)表示,一般在10′以内。步距误差主要由步进电动机齿距的加工误差,以及定子、转子间气隙不均和各相电磁转矩不均等因素造成,步距误差直接影响加工准确度和步进电动机的动态性能。
2)起动频率fq。步进电动机在空载以阶跃给定起动时,能进入不丢步的正常工作状态所允许的最高频率称为起动频率或突跳频率,用fq表示。一般步进电动机起动时,驱动脉冲频率不能高于fq。fq与负载惯性有关,负载惯量越大产生丢步可能性越大,这时fq不能很高。
3)连续运行的最高工作频率fmax。最高工作频率fmax是步进电动机保证不丢步的极限工作频率,fmax决定了步进电动机的最高转速。一般fmax远大于起动频率fq。fmax与负载的特性有关,也受驱动电源的性能限制。
4)加、减速特性。步进电动机在加速和减速时,为了不发生丢步或加步现象,脉冲频率的变化不能太快,因此转速上升时间Ta和下降时间Td不能太短,如图7.4所示。
5)矩频特性和动态转矩。矩频特性是步进电动机稳定连续工作时转矩与频率关系,如图7.5所示,动态转矩是矩频特性上每一频率对应的转矩,动态转矩随频率增加而减小。
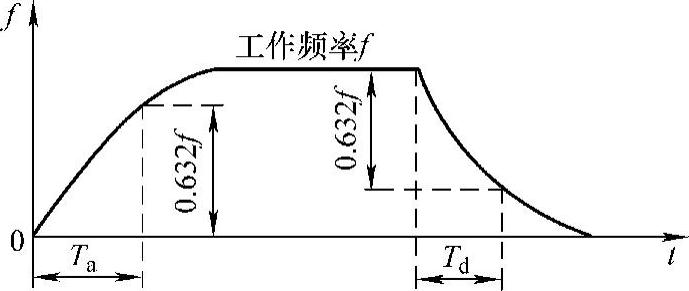
图7.4 加、减速特性曲线

图7.5 矩频特性
步进电动机的特性除步距角外,其他都与步进电动机的驱动电源有很大关系,驱动电源性能好,步进电动机的性能才能有保证。反应式步进电动机参数见表7.1。
表7.1 反应式步进电动机参数

有关电机运动控制系统的文章

接触器6种特性参数中,影响较大的几项介绍如下。4)和短路保护电器的协调配合接触器和短路保护电器的协调配合试验应由制造厂进行。5)额定工作制接触器有4种标准工作制,具体如下。断续周期工作制时的负载因数标准值为15%、25%、40%和60%。电气控制回路有电流种类、额定频率、额定控制电路电压Uc和额定控制电源电压Us等参数。在多数情况下,这2个电压是一致的。......
2023-06-30

LED的电压降取决于内部光子发射所需跃过的能量势垒。实际上,稳压二极管也有ESR,其值比LED的还要大。实际上,LED正向导通压降的偏差很大。超过此值可损坏LED。低于或高于此温度范围,LED将不能正常工作,效率大大降低。③ 光谱半宽度:表示LED的光谱纯度。由V-I曲线可以得出LED的正向电压、反向电流及反向电压等参数。......
2023-06-15

材料的特性8407钢是瑞典一胜百热作模具钢,属于铬、钼、钒合金工具钢和电渣重熔钢。参考对应牌号中国GB标准牌号4Cr5MoV1Si、美国AISI标准牌号H13 MODIFIED、日本JIS标准牌号SKD61、日本日立标准牌号DAC、日本不二越标准牌号HDS61、德国DIN标准材料编号1.2344、奥地利百禄标准牌号W302、瑞典UDDEHOLM标准牌号ORVAR专利钢材、瑞典一胜百标准牌号8402/8407。普通淬火、回火规范淬火温度℃,油冷,回火温度585℃/610℃/640℃,回火两次,每次2h,处理后硬度49HRC/47HRC/45HRC。......
2023-06-23

步进电动机又称脉冲电动机或阶跃电动机。步进电动机的机理是基于最基本的电磁铁作用。图6-39步进电动机系统框图无刷,电动机本体部件少,可靠性高。10)运行频率运行频率是指拖动一定负载使频率连续上升时,步进电动机能不失步运行的极限频率。图6-43矩频特性图6-44惯频特性14)单步响应单步响应是指步进电动机在带电不动......
2023-06-26

步进电动机采用直流电源供电。上述分析中的步进电动机步距角为30°。步进电动机驱动控制系统结构如图4-15所示。步进驱动控制面板包含步进电动机的驱动信号,与运动控制器的接口、方向和脉冲等控制信号接口。步进电动机一般用于开环伺服系统,由于没有位置反馈环节,故位置控制的精度由步进电机和进给丝杠等来决定。开环步进电动机控制系统框图如图4-16所示。......
2023-06-23

选用步进电动机通常希望步进电动机输出转矩大,起动和运行频率高,步距误差小,性价比高,但是这些要求往往是矛盾的,需要综合考虑。在脉冲当量确定后,可据此选择步进电动机的步距角和传动机构的传动比。步进电动机的步距角理论上是固定的,实际上存在误差,一般应将步进电动机的步距误差、负载引起的定位误差和传动机构的误差等都全部考虑在内,使总的误差小于机械允许的定位误差。......
2023-06-19

表7.3所列为三相六拍脉冲代码,按正、反转要求顺次提取代码,通过接口输出脉冲,改变读取一次数据的时间间隔,可以控制步进电动机转速。图7.8 单电压驱动电路1)单电压驱动电路。高、低压驱动电路采用两路电源供电,如图7.9所示,高压U1一般为80V,低压U2为步进电动机额定电压,一般为20V以下。恒流斩波驱动绕组电流上升快、边沿陡,响应好,功耗小,输出转矩稳定,并可减少步进电动机的共振现象发生。......
2023-06-19
水泵和电动机是同轴连接的一个整体,它的计算与选用电动机密切相关。轮灌期泵站总工作时间:T=12h/天×15天=180h则水泵的流量:Q=Wz/T=110000/180=611m3/h2.扬程的计算先根据最枯水位,确定实际扬程。如管路长度不超过实际扬程的2倍时,因水泵的扬程损失与很多因素有关,计算复杂,可按下式估算损失扬程,以确定水泵的总扬程水泵总扬程=实际扬程×1.25(左右)。......
2023-06-28
相关推荐