直流PWM双闭环可逆调速系统仿真模型如图2.22所示,模型中电动机和调节器模块与晶闸管可逆系统相同,直流斩波器使用Universal Bridge模块,模块设置为二桥臂,如图2.23所示。图2.25 直流PWM双闭环可逆调速系统波形图2.26 无电压限制时电容电压图2.27 电阻R电流......
2023-06-19

无刷直流电动机(梯形波永磁同步电动机)仿真使用永磁同步电机模块(Permanent Magnet Synchronous Machine),在模块对话框中Flux distribution栏下选择Trapezoidal(梯形波)。依据该模块建立的梯形波永磁同步电动机调速系统仿真模型如图6.27所示。模型中,系统主电路由直流电源DC、逆变器(Universal Bridge)和永磁同步电机(Permanent Magnet Synchronous Machine)模块组成。模型控制部分由转速给定模块n∗、转速调节器模块ASR、PWM脉宽调制器PWM Generator和控制器单元controller等组成。转速调节器输出脉宽控制信号,并通过脉宽调制器调节输出脉冲宽度,脉宽调制器相当于直流斩波控制器,用于控制电机三相电压。梯形波永磁同步电动机一般需要在电机轴上安装磁极位置检测,根据转子的磁极位置分配电动机三相绕组的通电,模型中是通过电机模块输出的转子位置角thetam信号,由控制器单元controller产生逆变器模块六个开关器件的120°驱动信号。controller模块的结构如图6.28所示。模块中,电机观测得到的转子位置角thetam通过Rounding Function、Relational Operator等模块运算得到以2π为周期、每隔π/3产生的一个脉冲宽度为2π/3的方波脉冲,该方波脉冲与脉宽调制器产生的脉宽信号pulse经过与门AND运算共产生六路驱动信号从gate端输出,在转子位置角thetam信号中连接的放大器np用于设置电机的极对数,以便将机械转角变换为电角弧度。

图6.28 controller模块的结构
模块参数见表6.2,电动机带载起动,初始转速给定n∗为2000r/min,在0.25s时改变为1000r/min,启动仿真得到结果如图6.29所示。其中,图6.29a所示为转速响应波形,起动后电动机转速很快达到了2000r/min,起动时电动机转速略有超调,稳定转速波动很小。0.25s时转速给定改变,转速迅速下降到1000r/min,波形表明系统也有良好的调速性能。图6.29b所示为电动机的转矩波形,转矩有一定波动,速度变化时转矩有响应但影响很小。图6.29c所示是无刷直流电动机一相绕组感应电动势,感应电动势是底宽为180°的梯形波,因此每相的磁通也是梯形波,以此特征,无刷直流电动机也称梯形波永磁同步电动机。图6.29d~f所示分别是三相电流波形,电流是120°的矩形波,因为电压是PWM斩波控制,矩形波顶部随斩波频率有较大波动。
表6.2 无刷直流电动机调速系统模块参数

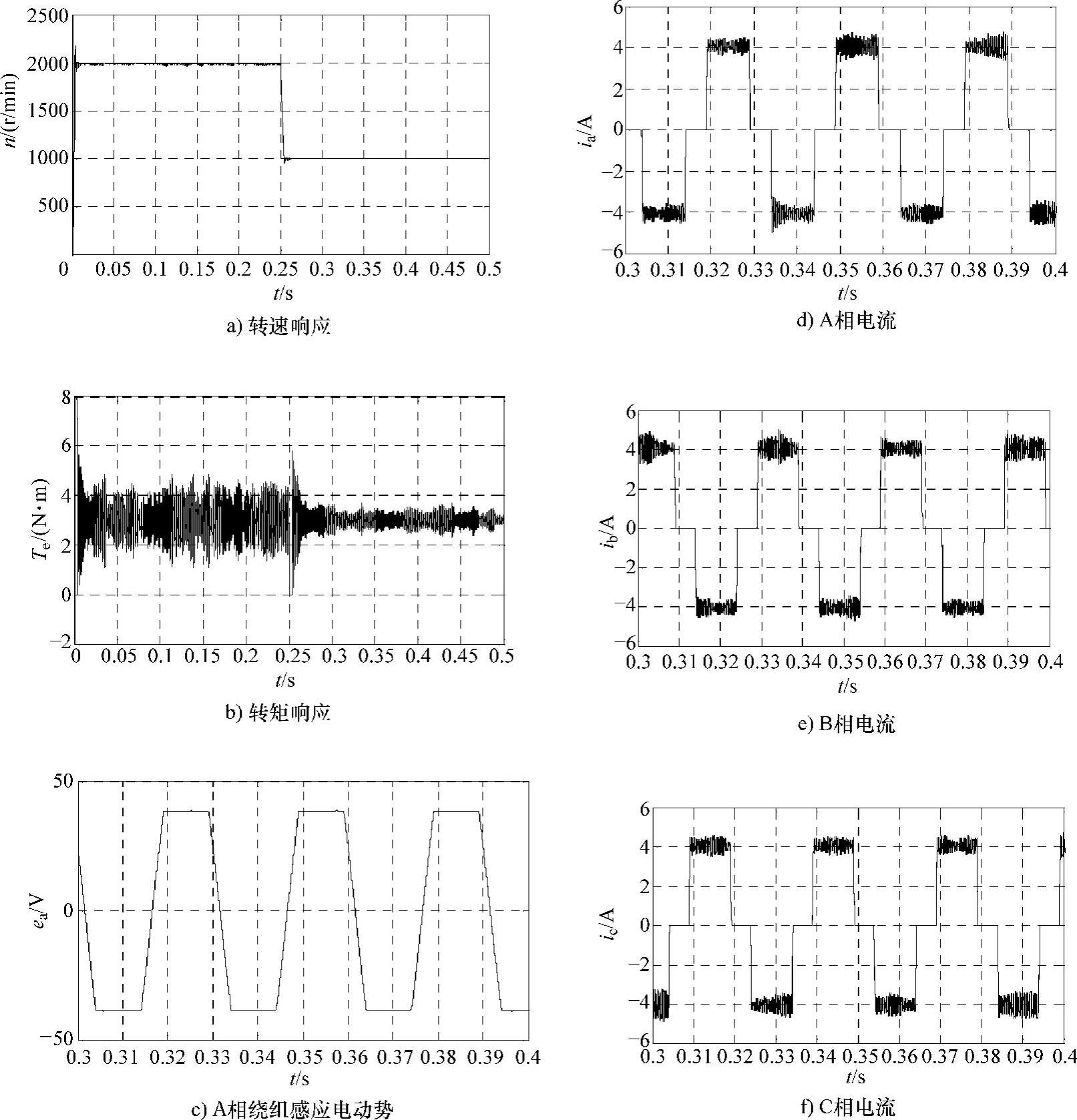
图6.29 无刷直流电动机系统仿真结果
有关电机运动控制系统的文章

直流PWM双闭环可逆调速系统仿真模型如图2.22所示,模型中电动机和调节器模块与晶闸管可逆系统相同,直流斩波器使用Universal Bridge模块,模块设置为二桥臂,如图2.23所示。图2.25 直流PWM双闭环可逆调速系统波形图2.26 无电压限制时电容电压图2.27 电阻R电流......
2023-06-19
图3.15 恒压频比控制VVVF变频调速系统仿真模型模型的控制部分由fHz模块设定电动机频率,GI模块限制升频速率,V-F模块设定压频比,函数模块ua、ub、uc产生三相调制波[见式]。图3.20c所示是正弦调制下经计算的电动机定子线电压有效值曲线,起动时Ul≈100V,3s左右Ul达到380V,与V-F曲线控制相符。......
2023-06-19

图1.43所示是晶闸管-直流电动机开环直流调速系统主电路模型,模型中主要模块提取路径见表1.11。现以例1.2的双闭环控制直流调速系统为例说明。......
2023-06-19

表1.13 双闭环控制直流调速系统电流调节器参数和滤波器参数3.仿真与分析设置双闭环控制直流调速系统模型参数后,再设置仿真参数,仿真算法取ode15s,仿真时间预定为3s,启动仿真得到的转速和电枢电流波形如图1.56所示。......
2023-06-19

由于无换向器电动机本质与普通直流电动机相同,因此其调速系统可以和直流电动机调速系统一样采取转速电流双闭环控制。无换向器电动机调速系统如图6.18所示。无换向器电动机控制一般采用晶闸管器件,成本较低,频率与转速同步,没有失步问题,适用于高电压、大电流、大容量同步电动机调速系统。......
2023-06-19

直流调速系统主要由直流调压-直流电动机主电路和控制两部分组成。仿真时,由于主电路对系统的影响很大,宜分步进行,应首先仿真主电路,在直流调压-直流电动机主电路仿真结果符合要求后,再仿真完整的系统。下面在直流调压-直流电动机主电路即开环系统的基础上介绍双闭环控制直流调速系统的仿真。......
2023-06-19

在单闭环有静差调速系统中,由于采用比例调节器,稳态时转速只能接近给定值,而不可能完全等于给定值。图2-19输出限幅电路3.采用积分调节器和比例-积分调节器的单闭环无静差调速系统1)积分调节器构成的无静差系统有静差调速系统无法消除Δncl,当把比例调节器换成积分调节器后,这一情况马上得以改观。图2-24表示无静差系统的抗扰动过程。......
2023-06-25

无刷直流电动机的速度范围宽,任何速度下都可以全功率运行。无刷直流电动机的体积小,功率密度高。无刷直流电动机无机械换向器,采用全封闭式结构,可以防止尘土进入电动机内部,可靠性高。无刷直流电动机比异步电动机的驱动控制简单。因此,在选择无刷直流电动机时,要注意以上四点,确保直流无刷电动机选型能够符合生产需要。......
2023-06-26
相关推荐