例4.2建立磁链开环转差型矢量控制系统模型并进行仿真分析。图4.23 转差频率控制的矢量控制系统仿真模型为了便于比较,转差频率矢量控制系统电动机参数与磁链闭环矢量控制系统模型相同,ASR取值也相同,其他模块参数见表4.2。图4.24 带转矩内环的转速、磁链闭环矢量控制系统仿真结果图4.25 定子磁链轨迹图4.26 转矩-转速特性电动机转速波形反映了电动机起动时,转速从0上升到1400r/min和下降到1000r/min的运行过程。......
2025-09-29
永磁同步电动机按转子位置定向的矢量控制系统(见图6.21)仿真模型如图6.22所示,各模块与原理图对应。选择永磁同步电动机(Permanent MagnetSynchronous Machine)模块的励磁类型为正弦波sinousoidal,电动机转速、电流和转角信号都取自永磁同步电动机的检测模块。模型中放大器Gain1用于调整坐标变换模块dq0-abc输出三相调制信号的幅值,Gain2用于调整定子三相电流反馈信号幅值,Gain3用于设定电动机极对数。电动机参数、转速调节器和电流调节器等模块参数见表6.1。
表6.1 永磁同步电动机调速系统模块参数
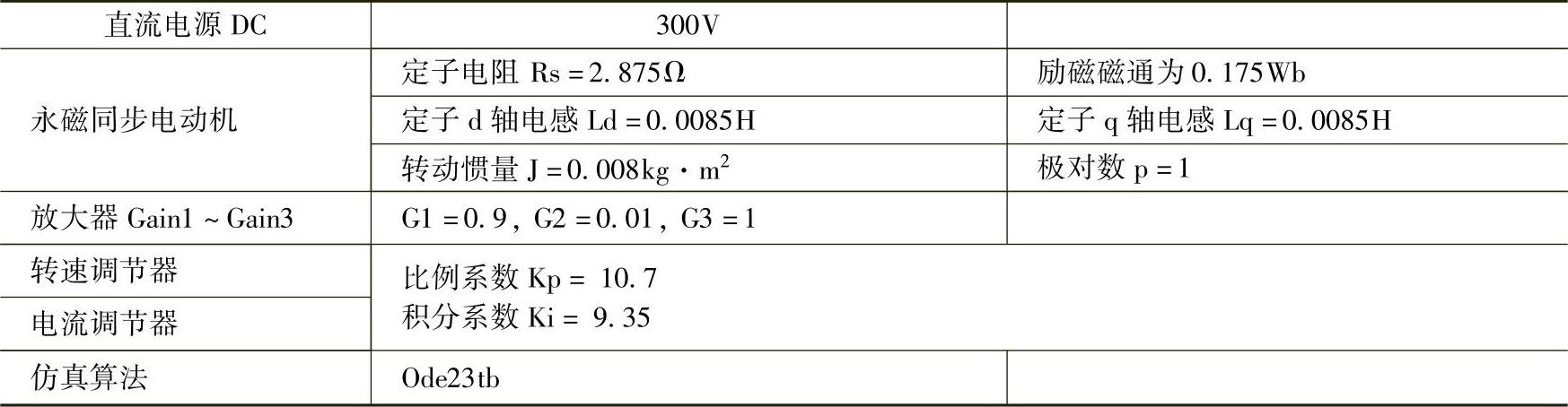
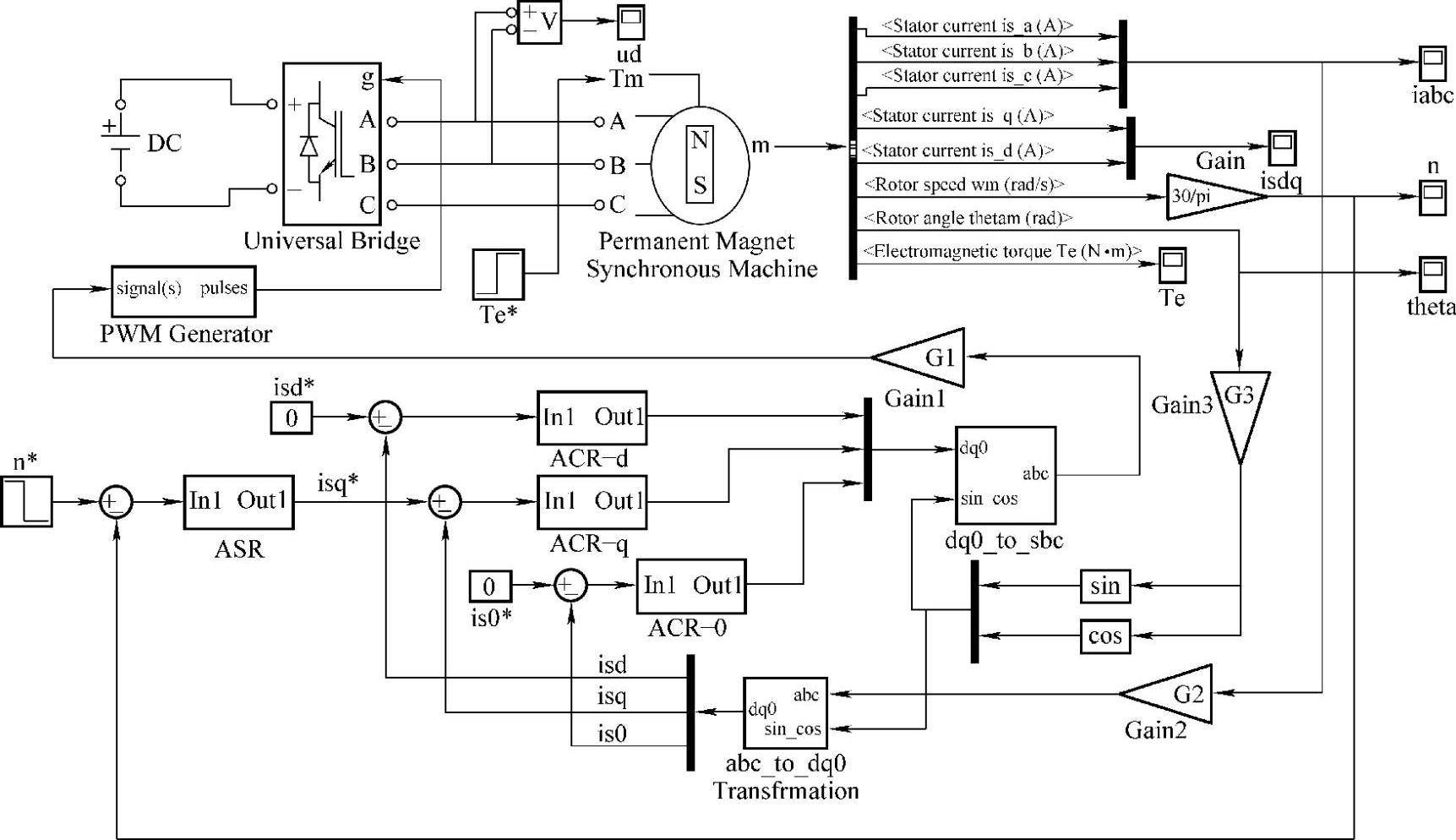
图6.22 永磁同步电动机按转子位置定向的矢量控制系统仿真模型
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
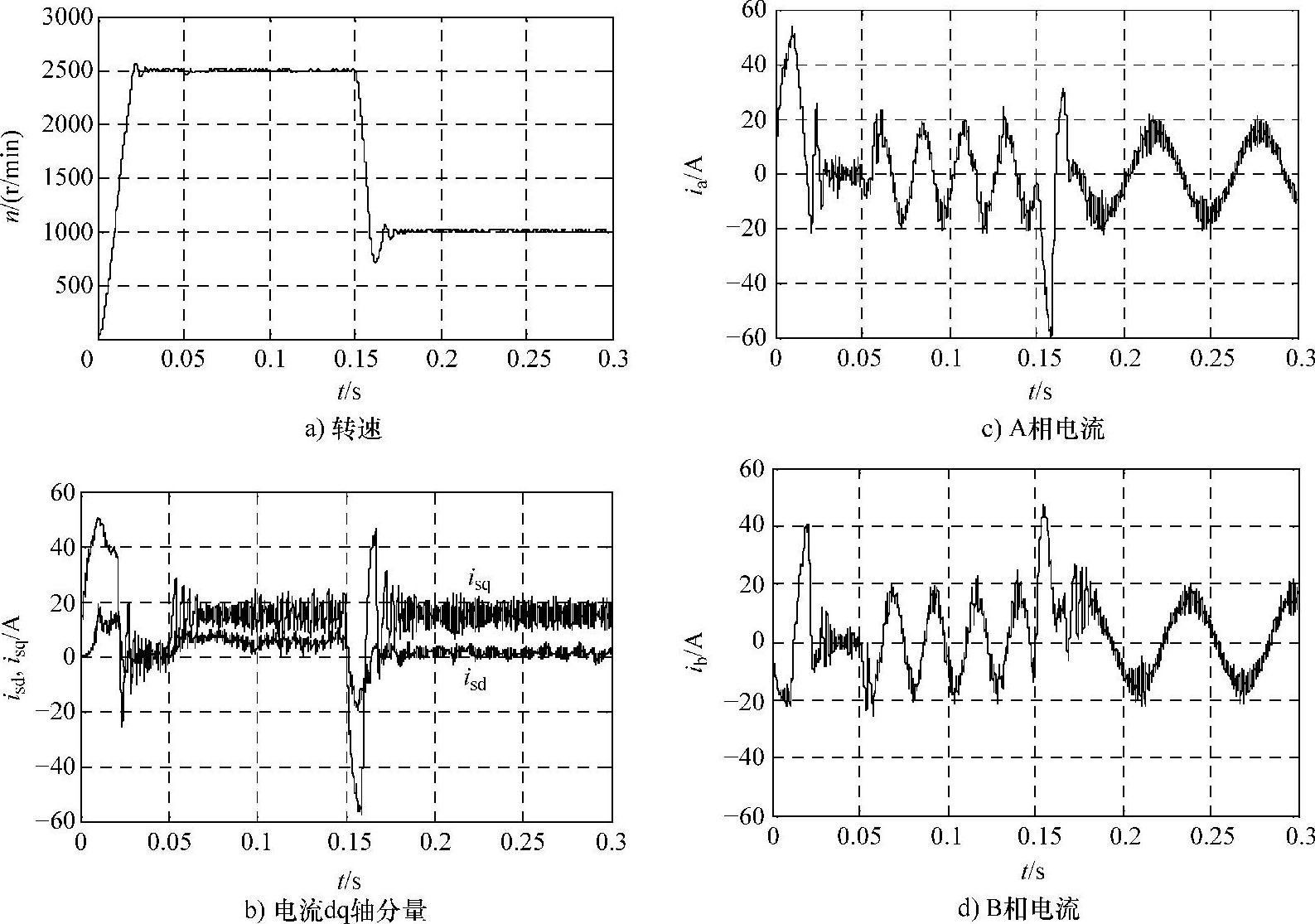
图6.23 永磁同步电动机调速系统仿真结果
仿真结果如图6.23所示。其中,图6.23a所示为n∗=2500r/min时的转速响应,电动机以空载起动,0.025s时电动机达到给定转速,在0.05s时电动机加载4N·m,转速略有波动后仍保持给定转速2500r/min。在0.15s时将转速给定调整为1000r/min,电动机转速很快随之下降并稳定在1000r/min,转速响应曲线表明了同步电动机的调速性能和很好的转速稳定性。图6.23b所示为定子电流的转矩分量isq和励磁分量isd,励磁分量isd接近为0,系统实现了电动机转矩最大化控制。图6.23e所示为电动机转矩波形,其中TL为给定的负载转矩,Te为电磁转矩响应。图6.23c、d、f所示分别为三相定子电流波形,在0.05s前后电流频率随转速有相应的变化,但负载转矩未变,电流大小是相同的。
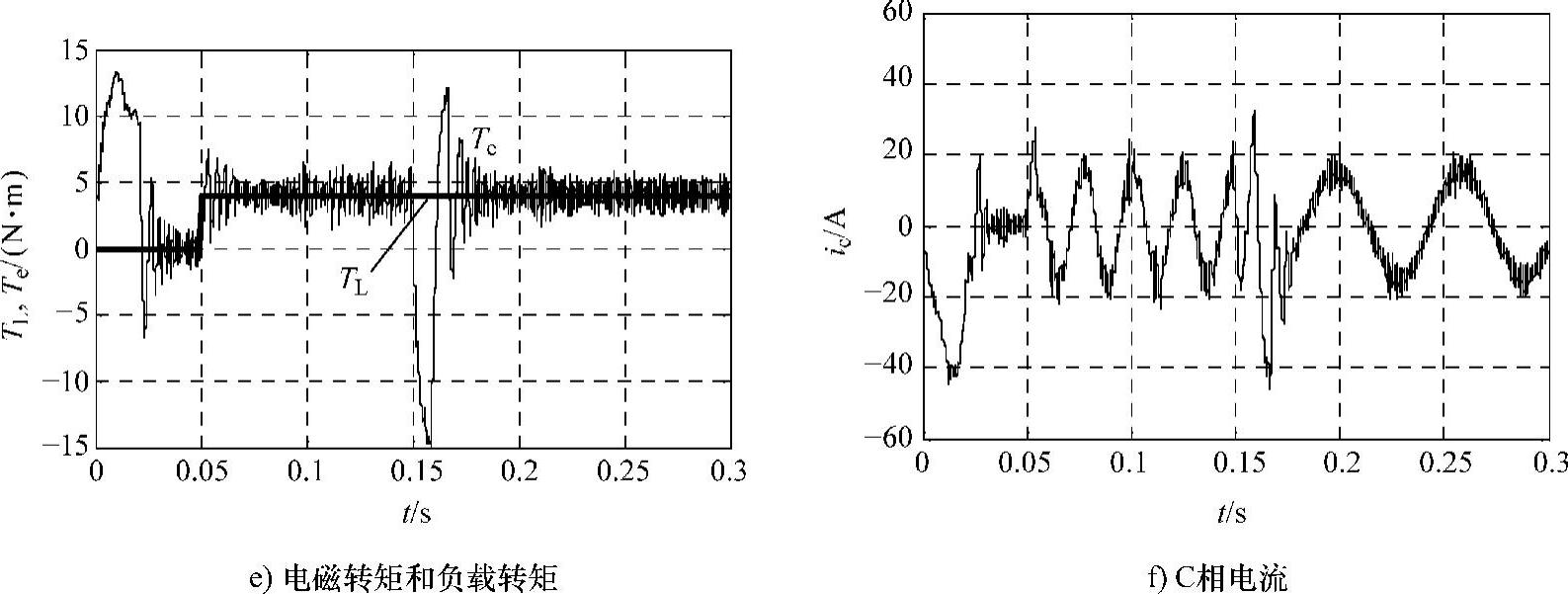
图6.23 永磁同步电动机调速系统仿真结果(续)
相关文章

例4.2建立磁链开环转差型矢量控制系统模型并进行仿真分析。图4.23 转差频率控制的矢量控制系统仿真模型为了便于比较,转差频率矢量控制系统电动机参数与磁链闭环矢量控制系统模型相同,ASR取值也相同,其他模块参数见表4.2。图4.24 带转矩内环的转速、磁链闭环矢量控制系统仿真结果图4.25 定子磁链轨迹图4.26 转矩-转速特性电动机转速波形反映了电动机起动时,转速从0上升到1400r/min和下降到1000r/min的运行过程。......
2025-09-29

图4.14 转速、磁链闭环矢量控制系统仿真模型1.仿真模型图4.12所示带转矩内环的转速、磁链闭环矢量控制系统仿真模型如图4.14所示。图4.18 定子磁链轨迹图4.19 转矩-转速特性......
2025-09-29

直接转矩控制和矢量控制都是高性能的异步电动机调速控制方式,两者的特点如下:1)直接转矩控制通过逆变器开关直接控制定子磁链,从而控制电动机转速。直接转矩控制的逆变器开关由空间电压矢量控制,而空间电压矢量的选择直接由电动机转矩控制,从计算量来说,矢量控制较大。因此,从响应速度来说,直接转矩控制有一定优势。直接转矩控制系统和矢量控制系统性能比较见表5.5。......
2025-09-29

图9.10 为工作台位置控制系统的工作原理图。图9.10工作台位置电液控制系统1—输入电位计;2—反馈电位计;3—放大器;4—电液伺服阀;5—液压缸;6—齿条齿轮副;7—工作台图9.11电液伺服系统的职能方块图θr—输入电位计转角;θc—反馈电位计转角;Ur—输入电位计输出端电位;Uc—反馈电位计输出端电位;i—电液伺服阀输入电流;ΔU=Ur-Uc;q—电液伺服阀输出流量;y—活塞位移......
2025-09-29

图4.20 磁链开环转差型矢量控制系统1.采用晶闸管电流型逆变器的磁链开环转差型矢量控制系统磁链开环转差型矢量控制系统也称间接型矢量控制系统,如图4.20所示。系统采取磁链开环控制,以磁链给定Ψr直接计算定子电流的励磁分量ism。采用晶闸管电流型变流器的磁链开环转差型矢量控制系统,适用于中大功率调速系统,但是因为电抗器体积大,输出电流是三相矩形波,谐波大,所以现在使用很少。图4.22 磁链开环转差控制型PWM调制矢量控制系统......
2025-09-29

图3.29显示了定子磁链轨迹,磁链轨迹基本呈圆形,但是跟踪控制产生的电流毛刺使磁链轨迹不光滑。从磁链曲线比较恒压频比控制和转差频率控制的效果,差别是明显的,虽然二者都是按稳态模型控制,但转差频率控制在转速稳定后磁链的波动较小。......
2025-09-29
在矢量控制系统中磁链是通过模型观测的,实际上电动机转速也可以通过模型来观测,以转速观测模型代替转速传感器,可以减少硬件开支,减少安装和维护的麻烦。由异步电动机在二相静止坐标系上电压方程[见式],在方程的第3、4行中包含了转速ω项,因此从第3行可得上式中与ω有关的都是转子参数,不易观测,需要变换为定子参数。以转速观测代替测速发电机和光电编码器即可组成无转速传感器的矢量控制系统。......
2025-09-29
图中受端系统可以看做为内阻抗为零、电势为的发电机。因为它除了表示和电压之间的相位差,即表征系统的电磁关系之外,还表明了各发电机转子之间的相对空间位置。而发电机转子间的相对运动性质,恰好是判断各发电机之间是否同步运行的依据。如果设想把送端发电机和受端系统发电机的转子移到一处[见图13-4],则功角δ就是两个转子轴线间用电角度表示的相对空间位置角。因为两个发电机电角速度相同,所以相对位置保持不变。......
2025-09-29
相关推荐