由模型[见式]第1、2行可得usα=isα+Lmpirαusβ=isβ+Lmpirβ将式的irα、irβ代入上式,并令σ=1-L2m/LsLr,整理可得所以由式组成的转子磁链计算流程如图4.10所示。与电流模型法相比,电压模型法只涉及定子电阻,定子电阻易于测量并且受温度影响较小,但是在低速时,定子电阻压降的影响增大,定子电阻压降对磁链计算的影响增加,因此电压模型较适合于高速范围的观测。......
2023-06-19
定子磁链观测有电压模型法、电流模型法和两者结合的复合模型法等多种方法。
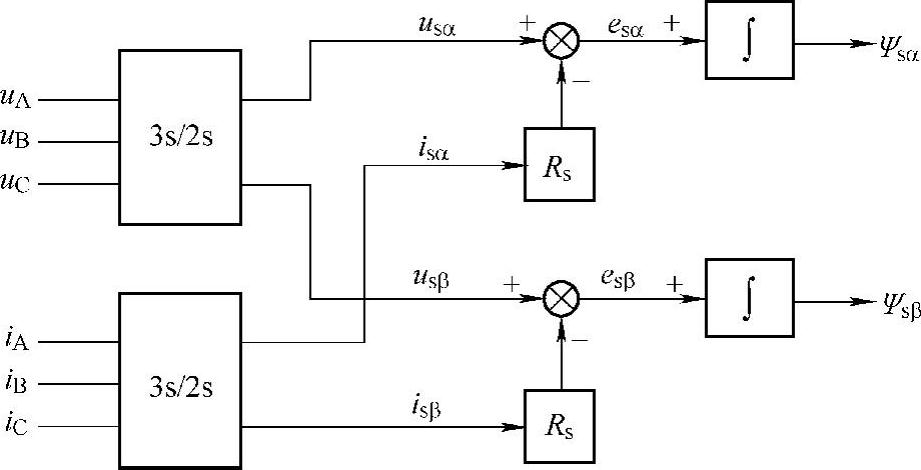
图5.7 定子磁链的电压模型
1.定子磁链观测的电压模型法(u-i法)
定子磁链观测的电压模型法检测电动机定子三相电压和电流,经3/2变换得到在αβ静止坐标系的二相电压(usα,usβ)和电流(isα,isβ),如图5.7所示。由定子电压方程可得定子磁链ψs在αβ静止坐标系的分量
Ψsα=∫esαdt=∫(usα-Rsisα)dt
Ψsβ=∫esβdt=∫(usβ-Rsisβ)dt (5.10)
定子磁链幅值Ψs和位置角φs(见图5.8)为

电压模型法较简单,只有两个积分计算,但是使用时存在下列问题:
1)模拟积分器存在漂移,积分计算误差较大。
2)在低速时,随着频率的减小,us的模值减小,使Rsis项误差对磁链Ψs计算准确度的影响变大。

图5.8 定子αβ坐标系
2.定子磁链观测的电流模型法(i-n法)
由异步电动机在二相dq坐标系上的磁链方程[见式(4.42)],可得在αβ静止坐标系上的磁链方程为
Ψsα=Lsisα+Lmirα
Ψsβ=Lsisβ+Lmirβ(5.13)
Ψrα=Lrirα+Lmisα
Ψrβ=Lrirβ+Lmisβ
式中,Ls为定子绕组自感,Ls=Lls+Lm;Lr为转子绕组自感,Lr=Llr+Lm;Lm为定转子绕组间互感。
由式(5.13)中的转子磁链方程,有

将式(5.14)代入式(5.13)第1、2行,得

式中,σ为漏磁系数, ;Tr为转子励磁时间常数,Tr=Lr/Rm。由式(4.64),异步电动机转子磁链Ψrα、Ψrβ为
;Tr为转子励磁时间常数,Tr=Lr/Rm。由式(4.64),异步电动机转子磁链Ψrα、Ψrβ为

综合式(5.15)和式(5.16)可得定子磁链的电流模型如图5.9所示。定子磁链电流模型的准确度与转速ω和转子时间常数Tr有关,在高速时准确度不如电压模型。
3.定子磁链观测的复合模型法
定子磁链的电压模型在高速的时候比较好,电流模型在低速时效果较好,如果将两种模型结合组成定子磁链观测的复合模型,则在高速和低速时都能取得较好的观测效果。
定子磁链观测的复合模型如图5.10所示。模型中,电压模型观测的定子磁链Ψsα、Ψsβ与电流模型观测的定子磁链Ψ′sα、Ψ′sβ比较,以 、
、 补偿定子电动势信号esα、esβ,使低速时以电流模型观测结果为主,高速时以电压模型观测结果为主。模型中,α为切换系数,一般取α=10~30,即在10%~30%额定转速时切换。复合模型将u-i模型和i-n模型相互切换使用,实验证明是可行的,但是u-i模型向i-n模型快速切换的问题还没有很好解决。
补偿定子电动势信号esα、esβ,使低速时以电流模型观测结果为主,高速时以电压模型观测结果为主。模型中,α为切换系数,一般取α=10~30,即在10%~30%额定转速时切换。复合模型将u-i模型和i-n模型相互切换使用,实验证明是可行的,但是u-i模型向i-n模型快速切换的问题还没有很好解决。
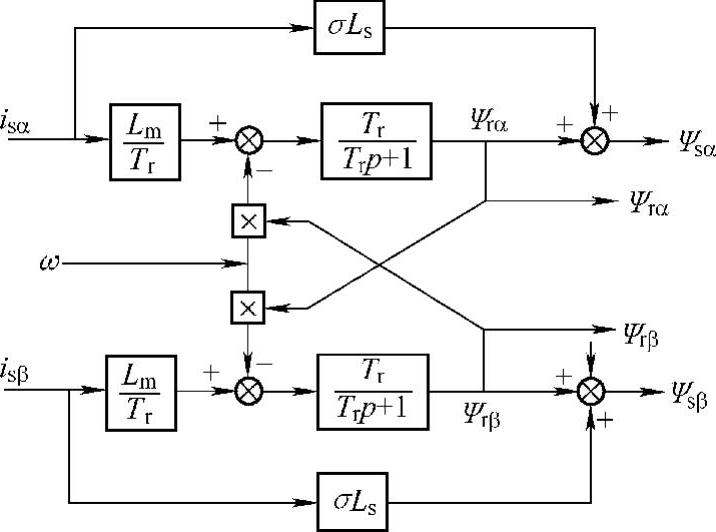
图5.9 定子磁链的电流模型

图5.10 定子磁链观测的复合模型
4.定子磁链观测的电动机模型法(u-n模型)
定子磁链观测的电动机模型如图5.11所示。该模型与复合模型不同的是,用电压模型的Ψsα、Ψsβ与电流模型中的转子磁链Ψrα、Ψrβ比较,以得到的偏差ΔΨ计算电流i′sα、i′sβ,然后由偏差ΔΨ经PI调节器补偿定子电动势esα、esβ。模型中,PI调节器的作用是迫使模型计算的电流i′sα、i′sβ与实测电流isα、isβ相等,如果模型计算的电流i′sα、i′sβ与实测电流isα、isβ不等,则PI调节器输出补偿定子电动势esα、esβ,修正Ψsα、Ψsβ和i′sα、i′sβ,直到Δi=0,如此可以减小低速时电动机参数和定子电阻分量对定子磁链观测的影响。定子磁链观测的电动机模型自然地解决了切换问题,高速时电动机模型实际工作于u-i模型下,低速时电动机模型实际工作在i-n模型下,它综合了u-i模型和i-n模型各自的优点,是在全速范围内都实用的高准确度磁链观测模型。

图5.11 定子磁链观测的电动机模型
有关电机运动控制系统的文章

由模型[见式]第1、2行可得usα=isα+Lmpirαusβ=isβ+Lmpirβ将式的irα、irβ代入上式,并令σ=1-L2m/LsLr,整理可得所以由式组成的转子磁链计算流程如图4.10所示。与电流模型法相比,电压模型法只涉及定子电阻,定子电阻易于测量并且受温度影响较小,但是在低速时,定子电阻压降的影响增大,定子电阻压降对磁链计算的影响增加,因此电压模型较适合于高速范围的观测。......
2023-06-19

图4.8 二相静止坐标系上的转子磁链观测模型的计算框图2.按磁场定向的二相旋转坐标系上转子磁链观测模型根据矢量控制方程式和式可以得到在二相旋转坐标系上按转子磁链定向的转子磁链观测模型,如图4.9所示。图4.9 二相旋转坐标系上按转子磁链定向的转子磁链观测模型......
2023-06-19

双馈发电机转子侧变流器按磁链定向的矢量控制系统如图8.11所示。图8.11 双馈发电机转子侧变流器按定子磁链定向的矢量控制系统系统检测发电机定子侧三相电压和电流,经3s/2s静止变换得到αβ坐标系上的电压usα、usβ和电流isα、isβ,然后由定子磁链观测器计算定子磁链Ψs幅值和位置角θs[见式、式]。......
2023-06-19

图4.20 磁链开环转差型矢量控制系统1.采用晶闸管电流型逆变器的磁链开环转差型矢量控制系统磁链开环转差型矢量控制系统也称间接型矢量控制系统,如图4.20所示。系统采取磁链开环控制,以磁链给定Ψr直接计算定子电流的励磁分量ism。采用晶闸管电流型变流器的磁链开环转差型矢量控制系统,适用于中大功率调速系统,但是因为电抗器体积大,输出电流是三相矩形波,谐波大,所以现在使用很少。图4.22 磁链开环转差控制型PWM调制矢量控制系统......
2023-06-19

《区块链革命》一书的作者,加拿大作家、研究员AlexTapscott和Don Tapscott称,区块链技术的发展预示着第二代互联网的到来。这一网络能及时进行更新,并验证参与各方是否达成共识。接下来,我们将用8张图表分析区块链的未来发展趋势。采用者不断加入的增长势头预计会持续到2025年,届时,区块链将最终成为金融服务业采用的主流技术。有趣的是,通过对比历史风险投资金额与未来资本市场融资金额来看,区块链技术的主要资金来源并不是金融服务业。......
2024-01-10

实用的态度起于实用的知觉,实用的知觉起于经验。木商看古松的态度便是如此。理论是和实用相对的。实用的态度以善为最高目的,科学的态度以真为最高目的,美感的态度以美为最高目的。在实用态度中,我们的注意力偏在事物对于人的利害,心理活动偏重意志;在科学的态度中,我们的注意力偏在事物间的互相关系,心理活动偏重抽象的思考;在美感的态度中,我们的注意力专在事物本身的形象,心理活动偏重直觉。......
2023-07-18
1.区块链的定义从科技层面来看,区块链涉及数学、密码学、互联网和计算机编程等很多科学技术问题。区块链是分布式数据存储、点对点传输、共识机制、加密算法等计算机技术的新型应用模式。区块链是比特币的一个重要概念,它本质上是一个去中心化的数据库,同时作为比特币的底层技术,是一串使用密码学方法相关联产生的数据块,每一个数据块中包含了一批次比特币网络交易的信息,用于验证其信息的有效性(防伪)和生成下一个区块。......
2023-11-01

例4.2建立磁链开环转差型矢量控制系统模型并进行仿真分析。图4.23 转差频率控制的矢量控制系统仿真模型为了便于比较,转差频率矢量控制系统电动机参数与磁链闭环矢量控制系统模型相同,ASR取值也相同,其他模块参数见表4.2。图4.24 带转矩内环的转速、磁链闭环矢量控制系统仿真结果图4.25 定子磁链轨迹图4.26 转矩-转速特性电动机转速波形反映了电动机起动时,转速从0上升到1400r/min和下降到1000r/min的运行过程。......
2023-06-19
相关推荐