转速闭环控制的异步电动机调压调速系统如图3.6所示。显然,闭环控制后,负载增加时由于转速闭环控制自动提高了电动机的供电电压,电动机工作在电压较高的特性曲线上,使负载增加引起的转速降减小。连接A点和C点可以得到转速闭环控制后的机械特性,该特性有较小的斜率和较大的硬度,闭环控制减小了由负载变化引起的转速降。......
2025-09-29
1.采用交-直-交电压型电流跟踪逆变器
带转矩内环的转速、磁链闭环矢量控制系统又称直接矢量控制系统,如图4.12所示。矢量控制方程是通过电流的转矩分量和励磁分量控制转矩和转子磁链,因此图4.12所示系统主电路采用了交-直-交电压型电流跟踪逆变器(参见图3.25)。系统的控制包括:电流变换和磁链观测模块、磁链给定模块、磁链调节器AΨR、转速调节器(ASR)、转矩调节器(ATR)以及二相旋转/二相静止变换模块VR-1和二相静止/三相静止变换模块2/3。磁链给定模块根据转速ω确定转子磁链Ψr∗,在基速以下恒励磁控制,基速以上弱磁控制,AΨR调节定子电流的励磁分量is∗m。ASR和ATR组成定子电流转矩分量is∗t的双闭环控制,ASR的输出限幅受磁链给定信号Ψr∗控制,在弱磁情况下减小转矩限幅值Te∗m。因为电动机转矩受转子磁链的影响很大,所以系统增加了转矩内环,设置转矩内环后,转子磁链的变化相当于转矩内环前向通道上的一种扰动,转矩内环对它可以有一定抑制作用,从而减小磁链变化的影响。若不设转矩环,则转子磁链的影响要在电动机转速变化后,经过ASR调节才能起作用,转矩内环能抑制扰动,加快转矩调节速度,也间接限制了电流。
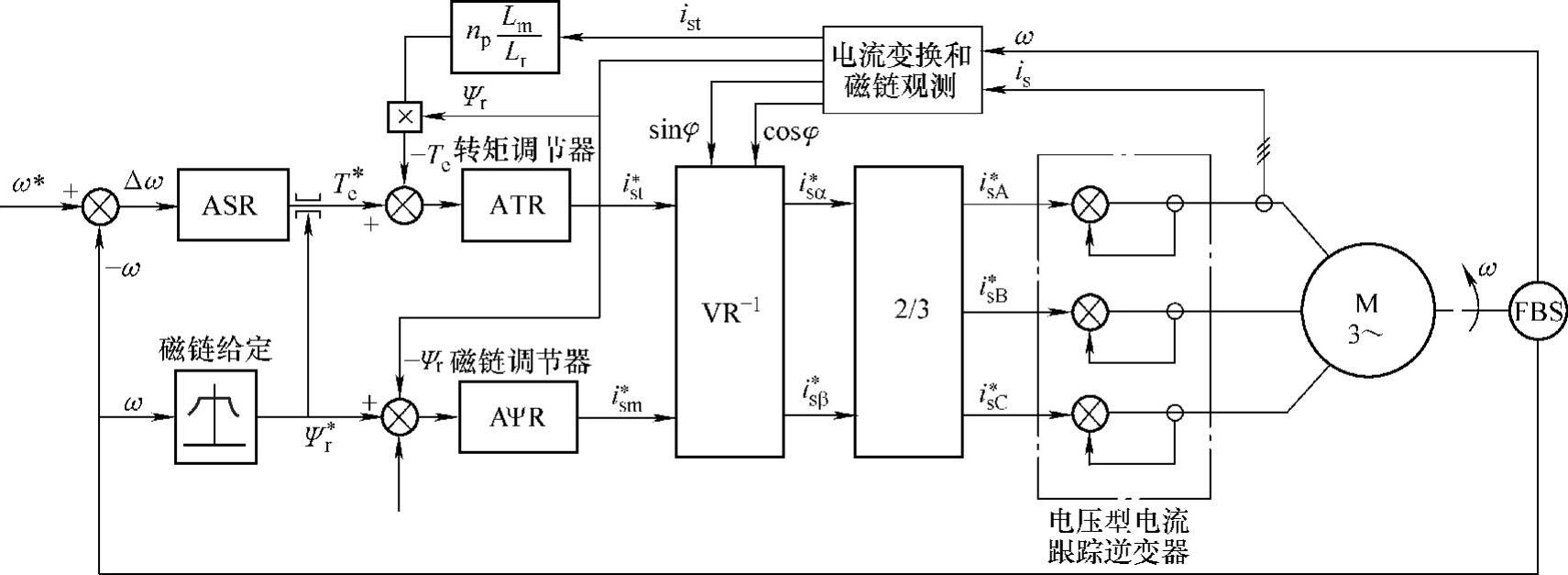
图4.12 采用电压型电流跟踪逆变器的带转矩内环的转速、磁链闭环矢量控制系统
系统检测出异步电动机转速ω和三相电流后,由电流变换和磁链观测模块(见图4.9)计算图4.12所示系统的定子电流的转矩分量is∗t、转子磁链Ψr和定向角φ,并按式(4.58)计算电动机的转矩反馈信号Te。系统工作时,定子电流转矩分量is∗t随转速偏差Δω调节。is∗t和is∗m经VR-1模块和2/3模块,得到定子三相电流给定信号iA∗、iB∗、iC∗。电压型电流跟踪逆变器根据iA∗、iB∗、iC∗控制定子三相电流,从而控制电动机磁链和转速。
在提高转速给定ω∗时,ASR和ATR输出增加,iA、iB、iC的转矩分量增加,在动态中,电流幅值和频率随转速变化,提高了电动机调速的动态响应能力。(https://www.chuimin.cn)
2.采用电压型SPWM逆变器
电流跟踪逆变器的电流调制频率不固定,变化较大,对电动机转矩波动影响较大,电压型SPWM逆变器调制频率是载波(三角波)频率,较高的载波频率可以减少转矩波动,因此图4.13所示系统采用了电压型SPWM逆变器。系统控制原理与采用电流跟踪逆变器系统(见图4.12)相同,不同之处是增加了三相电流调节器(ACR)。ACR的输出是SPWM逆变器的三相电压调制信号uA∗、uB∗、uC∗,ACR使uA∗、uB∗、uC∗跟随电流变化,因为三相电流和电压都是正弦波信号,所以对ACR的参数整定和调节速度要求较高。磁链给定和三相电流给定后的滤波器用于减少给定波动对转速和磁链的影响。
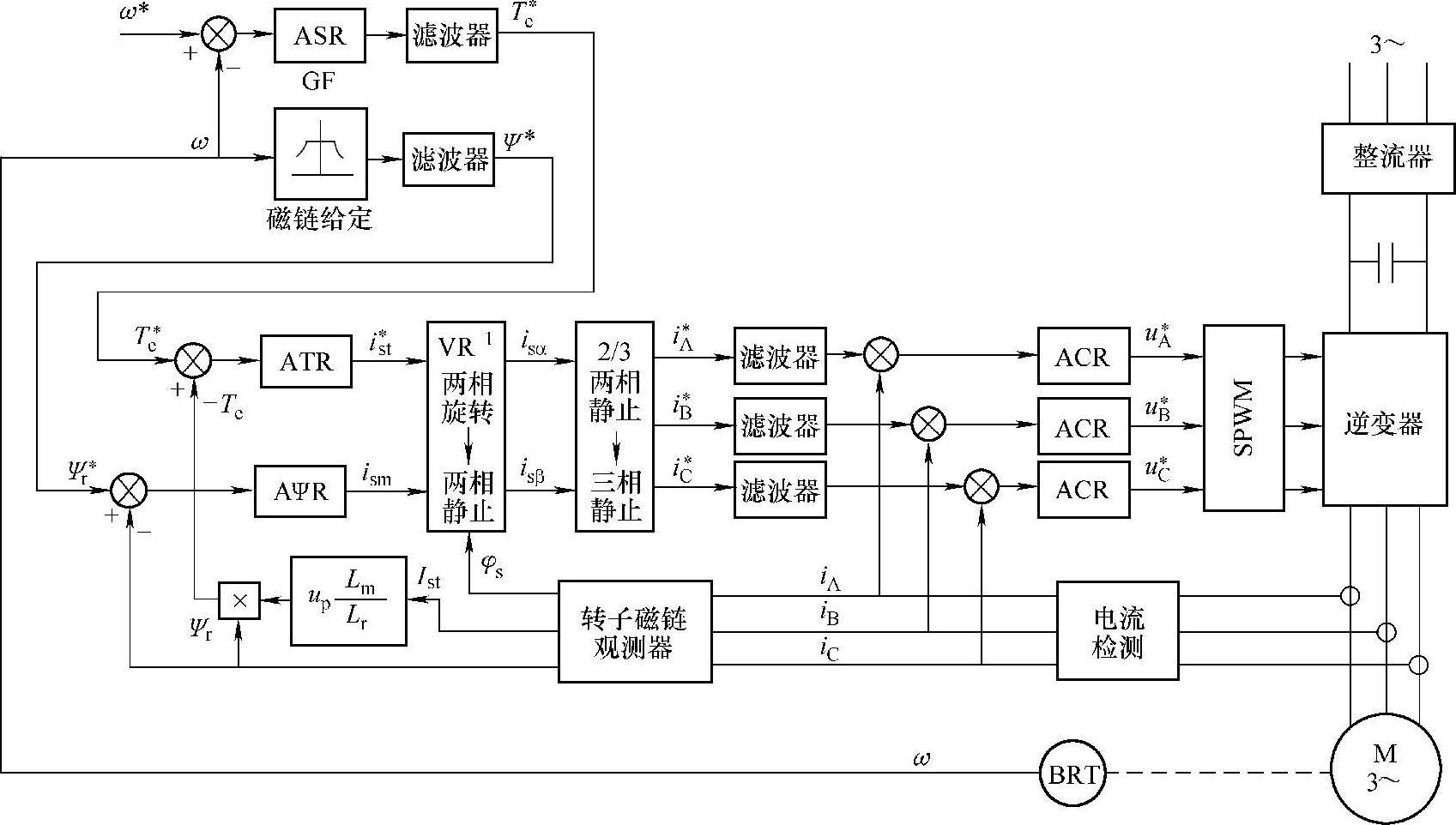
图4.13 采用SPWM逆变器的带转矩内环的转速、磁链闭环矢量控制系统
相关文章

转速闭环控制的异步电动机调压调速系统如图3.6所示。显然,闭环控制后,负载增加时由于转速闭环控制自动提高了电动机的供电电压,电动机工作在电压较高的特性曲线上,使负载增加引起的转速降减小。连接A点和C点可以得到转速闭环控制后的机械特性,该特性有较小的斜率和较大的硬度,闭环控制减小了由负载变化引起的转速降。......
2025-09-29

由模型[见式]第1、2行可得usα=isα+Lmpirαusβ=isβ+Lmpirβ将式的irα、irβ代入上式,并令σ=1-L2m/LsLr,整理可得所以由式组成的转子磁链计算流程如图4.10所示。与电流模型法相比,电压模型法只涉及定子电阻,定子电阻易于测量并且受温度影响较小,但是在低速时,定子电阻压降的影响增大,定子电阻压降对磁链计算的影响增加,因此电压模型较适合于高速范围的观测。......
2025-09-29
图4.8 二相静止坐标系上的转子磁链观测模型的计算框图2.按磁场定向的二相旋转坐标系上转子磁链观测模型根据矢量控制方程式和式可以得到在二相旋转坐标系上按转子磁链定向的转子磁链观测模型,如图4.9所示。图4.9 二相旋转坐标系上按转子磁链定向的转子磁链观测模型......
2025-09-29
图3.24所示的转速闭环转差频率控制的变频调速系统采用了交-直-交电压型电流跟踪逆变器,既是电压型逆变器又能对电流进行控制,综合了两种方式的优点。......
2025-09-29
前面介绍了转速反馈控制直流调速系统的原理,实际调速系统控制器的组成是随电子技术的不断发展而更新的。图1.26所示是由运算放大器组成的转速调节器控制的转速负反馈直流调速系统。表1.4 运算放大器组成的调节器参数2.电流截止负反馈环节调速系统引入转速负反馈控制后,转速偏差被减小或消除,系统的调速性能和调速范围有很大的提高,但是还存在起动和堵转时的过电流问题,影响电动机正常工作。转速调节器采用比例调节器。......
2025-09-29

扶手带及扶手带驱动系统主要由扶手带、扶手带驱动装置、扶手带导轨及扶手张紧装置等组成。与自动扶梯相同,扶手带驱动系统有大摩擦轮驱动、直线型扶手驱动及端部驱动三种方式。......
2025-09-29

梯级需要安装于梯级链轴上组成稳定的梯级联合体,在梯级链的牵引下,沿梯路导轨方向运行。因此,梯级与梯级链之间必须要有可靠的连接。但为了在日常维修中能方便地对梯级进行拆卸,梯级与梯级链之间的连接在结构上必须是相当简单的。但在套筒及梯级连接件中均加工有定位孔,并且在梯级连接件侧安装有定位弹簧销。......
2025-09-29

在忽略电动机铁心的铁耗和饱和时,绕组产生的磁动势与磁通成正比,并且相位相同,因此研究中常使用磁动势的概念。因为电动机绕组的对称性,因此,三相定子绕组的漏感相同,表示为Lls,三相转子绕组的漏感相同,表示为Llr。......
2025-09-29
相关推荐