由模型[见式]第1、2行可得usα=isα+Lmpirαusβ=isβ+Lmpirβ将式的irα、irβ代入上式,并令σ=1-L2m/LsLr,整理可得所以由式组成的转子磁链计算流程如图4.10所示。与电流模型法相比,电压模型法只涉及定子电阻,定子电阻易于测量并且受温度影响较小,但是在低速时,定子电阻压降的影响增大,定子电阻压降对磁链计算的影响增加,因此电压模型较适合于高速范围的观测。......
2023-06-19
1.建立在二相静止坐标系上的转子磁链观测模型
由式(4.42)可得,转子磁链在α、β轴上的分量为
Ψrα=Lrirα+Lmisα
Ψrβ=Lrirβ+Lmisβ (4.64)则

r
在二相静止坐标系上电压方程[见式(4.52)]中,对于笼型异步电动机,urα=0,urβ=0,得
Lmpisα+Lrpirα+ω(Lmisβ+Lrirβ)+Rrirα=0
Lmpisβ+Lrpirβ+ω(Lmisα+Lrirα)+Rrirβ=0
将式(4.64)、式(4.65)代入上式整理后得

根据式(4.66)得到的二相静止坐标系上的转子磁链观测模型的计算框图如图4.8所示。实测定子三相电流iA、iB、iC和电动机转速ω,经3s/2s变换得到定子电流的isα、isβ分量,经过式(4.66)运算得到转子磁链的Ψrα、Ψrβ分量,再经过极坐标计算得到转子磁链的幅值Ψr和位置角φ,根据转子磁链的位置角φ可以对dq坐标系进行定向控制。
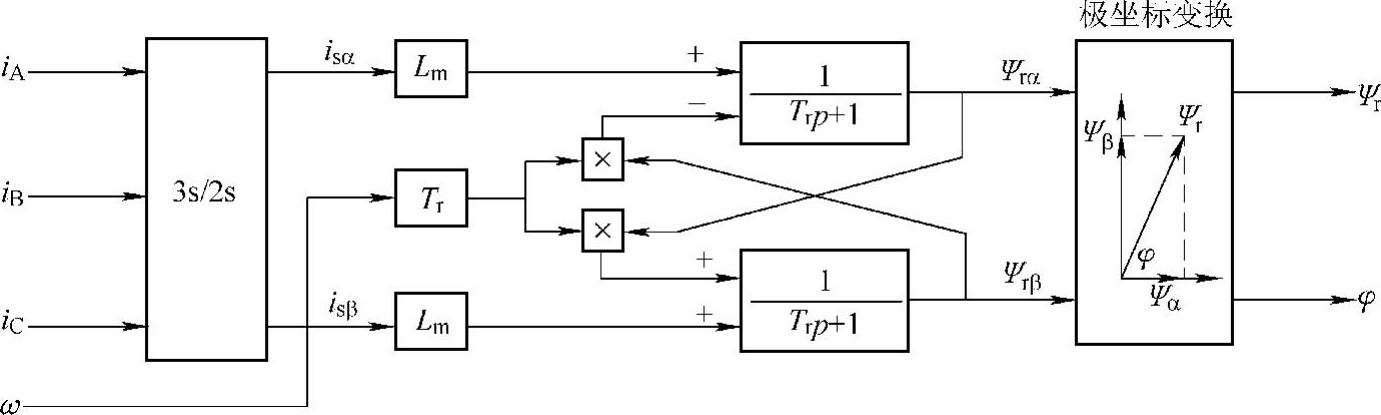
图4.8 二相静止坐标系上的转子磁链观测模型的计算框图
2.按磁场定向的二相旋转坐标系上转子磁链观测模型
根据矢量控制方程式(4.61)和式(4.63)可以得到在二相旋转坐标系上按转子磁链定向的转子磁链观测模型,如图4.9所示。模型中,同步频率ω1是转差频率ωs与转子转速折算的频率ω之和,转子磁链的相位角φ是ω1的积分。
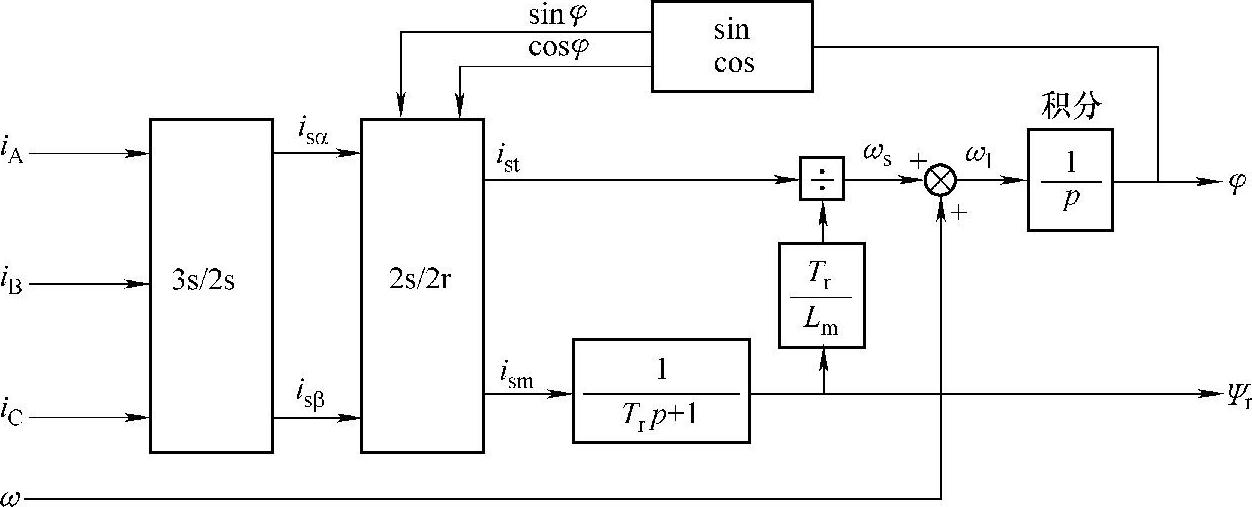
图4.9 二相旋转坐标系上按转子磁链定向的转子磁链观测模型
有关电机运动控制系统的文章

由模型[见式]第1、2行可得usα=isα+Lmpirαusβ=isβ+Lmpirβ将式的irα、irβ代入上式,并令σ=1-L2m/LsLr,整理可得所以由式组成的转子磁链计算流程如图4.10所示。与电流模型法相比,电压模型法只涉及定子电阻,定子电阻易于测量并且受温度影响较小,但是在低速时,定子电阻压降的影响增大,定子电阻压降对磁链计算的影响增加,因此电压模型较适合于高速范围的观测。......
2023-06-19

双馈发电机转子侧变流器按磁链定向的矢量控制系统如图8.11所示。图8.11 双馈发电机转子侧变流器按定子磁链定向的矢量控制系统系统检测发电机定子侧三相电压和电流,经3s/2s静止变换得到αβ坐标系上的电压usα、usβ和电流isα、isβ,然后由定子磁链观测器计算定子磁链Ψs幅值和位置角θs[见式、式]。......
2023-06-19

定子磁链观测有电压模型法、电流模型法和两者结合的复合模型法等多种方法。图5.7 定子磁链的电压模型1.定子磁链观测的电压模型法定子磁链观测的电压模型法检测电动机定子三相电压和电流,经3/2变换得到在αβ静止坐标系的二相电压和电流,如图5.7所示。由式,异步电动机转子磁链Ψrα、Ψrβ为综合式和式可得定子磁链的电流模型如图5.9所示。图5.11 定子磁链观测的电动机模型......
2023-06-19

图4.20 磁链开环转差型矢量控制系统1.采用晶闸管电流型逆变器的磁链开环转差型矢量控制系统磁链开环转差型矢量控制系统也称间接型矢量控制系统,如图4.20所示。系统采取磁链开环控制,以磁链给定Ψr直接计算定子电流的励磁分量ism。采用晶闸管电流型变流器的磁链开环转差型矢量控制系统,适用于中大功率调速系统,但是因为电抗器体积大,输出电流是三相矩形波,谐波大,所以现在使用很少。图4.22 磁链开环转差控制型PWM调制矢量控制系统......
2023-06-19

例4.2建立磁链开环转差型矢量控制系统模型并进行仿真分析。图4.23 转差频率控制的矢量控制系统仿真模型为了便于比较,转差频率矢量控制系统电动机参数与磁链闭环矢量控制系统模型相同,ASR取值也相同,其他模块参数见表4.2。图4.24 带转矩内环的转速、磁链闭环矢量控制系统仿真结果图4.25 定子磁链轨迹图4.26 转矩-转速特性电动机转速波形反映了电动机起动时,转速从0上升到1400r/min和下降到1000r/min的运行过程。......
2023-06-19

从式可以看到,电流正反馈Ui的作用相当于增加了转速给定值,因此称为电流补偿控制。因为βcr受放大倍数和电阻等诸多因素的影响,这些因素稍有变化,全补偿状态就可能被破坏,使系统不稳定,所以通常只使用欠补偿控制。关于电流补偿控制的讨论如下:1)电流补偿只是针对负载扰动的一种补偿措施。这时,电流正反馈补偿不仅没有抑制转速上升,反而是助长了转速上升,起了相反的作用。补偿控制也常用于温度等其他控制场合。......
2023-06-19
水位观测的时间和次数,以能测得完整的水位变化过程为原则。图X2.2浮子式自记水位计1—平衡锤;2—悬索;3—浮筒;4—水位轮;5—自记笔架;6—记录纸及滚筒;7—牵引索;8—钟发条轴;9—小滑轮;10—外壳;11—自记钟室;12—滚筒轴;13—导杆;14—画线笔;15—小弹簧2.水位资料的整理针对观测的原始水位记录,水位资料整理的内容之一是计算逐日平均水位,其计算方法主要有算术平均法和面积包围法。......
2023-06-21
图3.31可控电流源参数设置②串联RLC1 参数设置:电阻为1(Ω),电感为1e-2。图3.32脉冲发生器1 参数设置仿真电路图中U0 为负载电压,I0 为负载电流,单相电流型逆变电路的仿真波形如图3.33所示。脉冲发生器3、5 的延迟时间分别为0.03 s、0.05 s,脉冲发生器4、6、2 的延迟时间分别为0.04 s、0、0.02 s。图3.36三相电流型逆变电路的仿真波形......
2023-06-23
相关推荐