【摘要】:励磁和转矩可以独立控制而互不影响,这是直流电动机的优点。对于交流电动机的等效模型,如图4.7a所示,定子和转子都有两个互相垂直的绕组,定子磁场Ψs由定子d、q轴绕组磁场合成产生,转子磁场Ψr由转子d、q轴绕组合成产生,Ψs、Ψr和d、q轴及其绕组以同步速ω1旋转,它们之间的位置是相对静止的,这与直流电动机绕组的静止对应。图4.7 dq坐标系定向模型
在二相dq任意旋转坐标系的模型中[见式(4.49)],令ωdq=ω1,即dq坐标系以电动机同步速旋转,则ωdqs=ωdq=ω1,ωdqr=ωdq-ω=ω1-ω=ωs,代入式(4.49),得到异步电动机在一个二相dq同步旋转坐标系上的电压方程

模型的磁链方程、转矩方程和运动方程均不变,二相同步旋转坐标系模型(见图4.7a)的特点是:由式(4.29)和式(4.30),当三相ABC坐标系中的电压和电流是交流正弦波时,变换到同步旋转坐标系上就成为直流电,异步电动机在dq同步旋转坐标系上的模型与直流电机模型(见图1.2)有了相似性,所不同的是直流电机d轴只有一个定子励磁绕组,q轴只有一个等效的转子绕组,它们产生的磁场在空间上是静止并且互相垂直的,因此直流电动机可以分别通过定子绕组电流和转子绕组的电流来控制励磁和转矩。励磁和转矩可以独立控制而互不影响,这是直流电动机的优点。对于交流电动机的等效模型,如图4.7a所示,定子和转子都有两个互相垂直的绕组,定子磁场Ψs由定子d、q轴绕组磁场合成产生,转子磁场Ψr由转子d、q轴绕组合成产生,Ψs、Ψr和d、q轴及其绕组以同步速ω1旋转,它们之间的位置是相对静止的,这与直流电动机绕组的静止对应。但是Ψs和Ψr都不在d轴或q轴线上,图4.7中,Ψs和Ψr的位置是任意画的,仅为说明问题,也就是说,定子磁场Ψs和转子磁场Ψr都还不能像直流电动机那样由独立的绕组控制。(https://www.chuimin.cn)
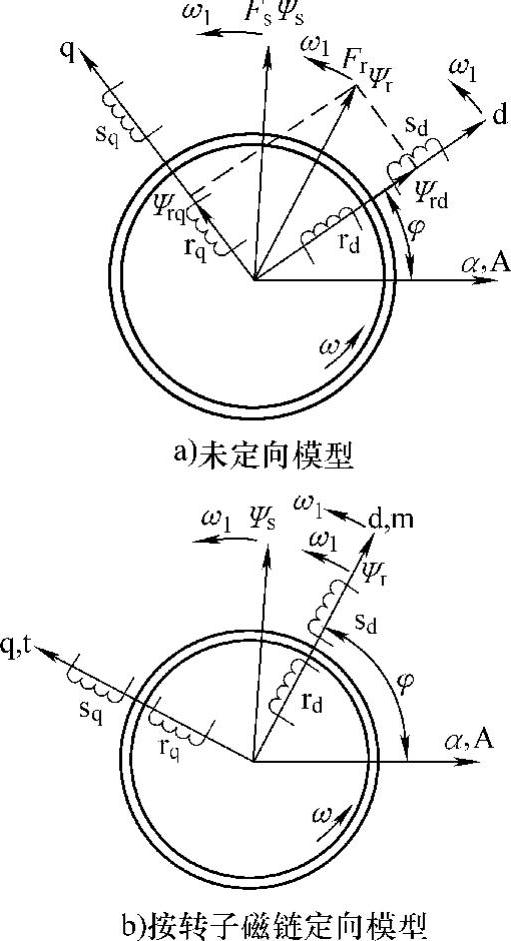
图4.7 dq坐标系定向模型




相关推荐