根据生产工艺对静、动态调速性能要求的不同,串级调速可以采用开环控制和闭环控制系统。由于串级调速系统的静态特性中静差率较大,通常开环系统只能用于对调速精度要求不高的场合。与直流调速系统一样,通常采用转速和电流双闭环串级调速系统。图5-15双闭环串级调速原理图......
2023-06-25
绕线转子异步电动机双馈控制电动机的调速范围宽,但是对转子电源的要求很高。一般绕线转子异步电动机是在同步速以下调速,工作在低同步速电动状态,这时仅需要将转差功率回输电源,利用晶闸管整流技术就可以实现转差功率的回馈控制,这种系统称为绕线转子异步电动机串级调速系统,如图3.35所示。
串级调速系统的转子电源由不控整流和晶闸管整流器组成,二极管整流器将转子的交流变为直流,直流电压Ud不受转子频率fr变化的影响,Ud=2.34sUr0。欲使晶闸管整流器工作在有源逆变状态,逆变状态晶闸管控制角的范围为90°≤α≤180°,以逆变角β表示时,β=180°-α,范围为0°≤β≤90°。晶闸管整流器直流侧电压Udβ=2.34UTcosβ,式中UT是网侧变压器二次电压,控制β就可以控制直流侧电压Udβ,从而控制直流电流Id和转子侧电流Ir,即

因此,绕线转子异步电动机串级调速系统改变逆变角β就可以控制转子电流进行调速。系统中,平波电抗器Ld的作用是平滑电流Id。在这种调速方式中,转子转差功率经不控整流器、晶闸管整流器和变压器回馈电源,因此属于异步电动机转差功率回馈型调速,系统效率比较高,是较节能的交流调速方式。串级调速系统晶闸管整流器交流侧电流IT与电压UT的相位差φ与逆变角β有关,在深控状态时β较大,系统的功率因数λ较低,λ=cosφ≈cosβ,并且IT为方波,谐波较大。因为使用了不控整流器,晶闸管串调系统只能输出转差功率,电动机不能如双馈电机一样进行次同步速下的回馈制动,如果要快速制动需要采用其他制动措施,这些是串级调速系统的不足之处。

图3.35 绕线转子异步电动机串级调速系统
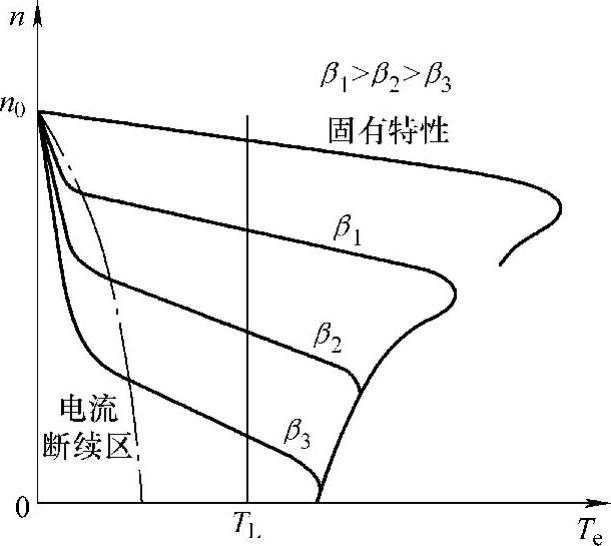
图3.36 串级调速机械特性
绕线转子异步电动机串级调速的机械特性如图3.36所示,因为RΣ包含转子电阻、电抗器电阻和变压器电阻等,所以串级调速系统转子回路电阻RΣ比较大,而且绕线转子异步电动机转子的漏抗比较大,漏抗在整流器换流时会造成换流电压降,使二极管整流器输出电压Ud减小,漏抗越大,负载越大,换流电压降也越大。上述回路电阻和换流电压降使绕线转子异步电动机串级调速机械特性较其固有机械特性的斜率大、机械特性软,在负载增加时转速降较大。串级调速系统的机械特性随晶闸管整流器逆变角β变化,最大转矩随β减小而减小,在负载不变时调节逆变角β,转速随之变化,如图3.36所示。晶闸管整流器在负载较小时会发生电流断续现象,负载越小电流断续越严重,在电流断续区电动机的转速降很大,因此电动机工作一般要避开电流的断续区。增大电抗器Ld可以减小电流断续区的范围。
串级调速系统的晶闸管整流器采用转速电流双闭环控制,系统起动时,ASR输出的电流给定Ui∗为限幅值,ACR输出的移相信号Uc最大,触发器输出β=90°的脉冲,晶闸管整流器电压Udβ=0,起动前转子电动势Er=sEr0=Er0,Ud=2.34Er0,有

所以起动时转子电流迅速上升,ACR限制了起动时的转子最大电流,当转速达到给定转速时,有

改变转速给定Un∗,系统即通过ASR和ACR控制Udβ,调节转速。ASR和ACR采用PI调节器,可以实现转速和电流的无静差控制。
绕线转子异步电动机串级调速比较异步电动机定子调压调速,其效率提高,调速范围扩大,调速性能好,但是尚不及变频调速。变频调速系统有更宽的调速范围,转速降小,转差损耗也较小,因此在变频调速发展后,串级调速已经很少应用。
有关电机运动控制系统的文章

根据生产工艺对静、动态调速性能要求的不同,串级调速可以采用开环控制和闭环控制系统。由于串级调速系统的静态特性中静差率较大,通常开环系统只能用于对调速精度要求不高的场合。与直流调速系统一样,通常采用转速和电流双闭环串级调速系统。图5-15双闭环串级调速原理图......
2023-06-25

在刚起动时,转子绕组回路的电阻值较大,转子以较慢的转速起动,然后随着转速的加快逐步减小电阻。图3-52a为对称串接电阻起动方式。电动机起动完成后,KM触头闭合,频敏变阻器被短接不起作用,电动机正常运转。图3-52 绕线转子电动机的起动调速方式......
2023-06-15

如图8-16所示为采用低同步晶闸管的串级调速系统,图中,M为电动机,NB为逆变变压器,ZPZ为转子整流器,KPZ为晶闸管逆变器。根据负载对静、动态调速性能要求的不同,串级调速可以采用开环控制和闭环控制系统。通常采用转速和电流双闭环串级调速系统。图8-18接触器控制电路为了进一步提高串级调速系统的性能,实现宽调和精调,扩大应用范围,可以利用微机实现的闭环调速系统,借以调节空调风机的风量。......
2023-06-25

图2.47串级调速系统原理图整流后的直流回路电压平衡方程式为或式中,UT2 为逆变变压器的二次相电压;β 为逆变装置的逆变角;R 为转子直流回路的总电阻。式可以看作在串级调速系统中异步电动机机械特性的间接表达式s=f。对串级调速系统而言,启动应有足够大的转子电流Ir 或足够大的整流后直流电流Id 。因此串级调速系统没有制动停车功能,只能靠减小β 角逐渐减速,并依靠负载阻转矩的作用自由停车。......
2023-06-23

说明:1)该模具为磁电动机转子自动叠铆的冲孔、落料等8个工位硬质合金级进模。④异形小凸模11、12采用保护套10结构,小凸模11同时采用铜焊套结构将凸模固定。淬硬套,既有利于保证导柱复位精度,又有利于上模座1、卸料板基体52、下模座49三个基体板配镗,更好地保证模架精度。......
2023-06-26
图5-11采用直流附加电动势的串级调速原理框图2.串级调速的分类从功率传递方向来看,串级调速实质上就是利用附加电动势Eadd控制异步电动机转差功率而实现调速的。因此,串级调速系统的基本运行状态可以通过功率传递关系来分析。但由于转速较低时,直流电动机不能产生足够的附加电动势,所以这种串级调速系统调速范围不大,通常在2∶1以内。图5-14机械串级调速......
2023-06-25
各种机床设备对三相异步电动机拖动的要求是,不仅能实现起动、停止、制动等操作,而且还要其能进行调速。所谓调速,是指用人为的方法,在负载转矩不变的情况下,通过改变三相异步电动机的参数或改变机械变速箱的变速比而得到不同的转速,以满足各种机床设备和机械加工工艺对不同转速的要求。......
2023-06-15
以普通晶闸管构成的方波型逆变器被全控型高频率开关组的PWM逆变器取代后,正弦波脉宽调制逆变器及其专用集成芯片得到普遍应用。磁通跟踪型PWM逆变器以其控制简单、数字化方便而又呈现出取代传统SPWM逆变器的趋势。另外,电流跟踪型PWM逆变器及滞环电流跟踪型PWM逆变器也受到了重视。......
2023-06-25
相关推荐