图3.24所示的转速闭环转差频率控制的变频调速系统采用了交-直-交电压型电流跟踪逆变器,既是电压型逆变器又能对电流进行控制,综合了两种方式的优点。......
2025-09-29
1.转差频率控制系统仿真模型
按转差频率控制系统原理(见图3.24)建立的仿真模型如图3.26所示。模型的主电路由逆变器和异步电动机模块连接组成,控制电路包括转速给定Constant模块和转速调节器PIASR模块等。函数发生器模块Is(Ws)按式(3.41)计算定子电流给定值Is∗,Fcn1~Fcn3模块按式(3.42)生成三相电流函数。三相滞环控制器模块Subsystem中包含六个滞环Relay控制模块(见图3.27),通过三相反馈电流与给定波形比较产生六路驱动脉冲。
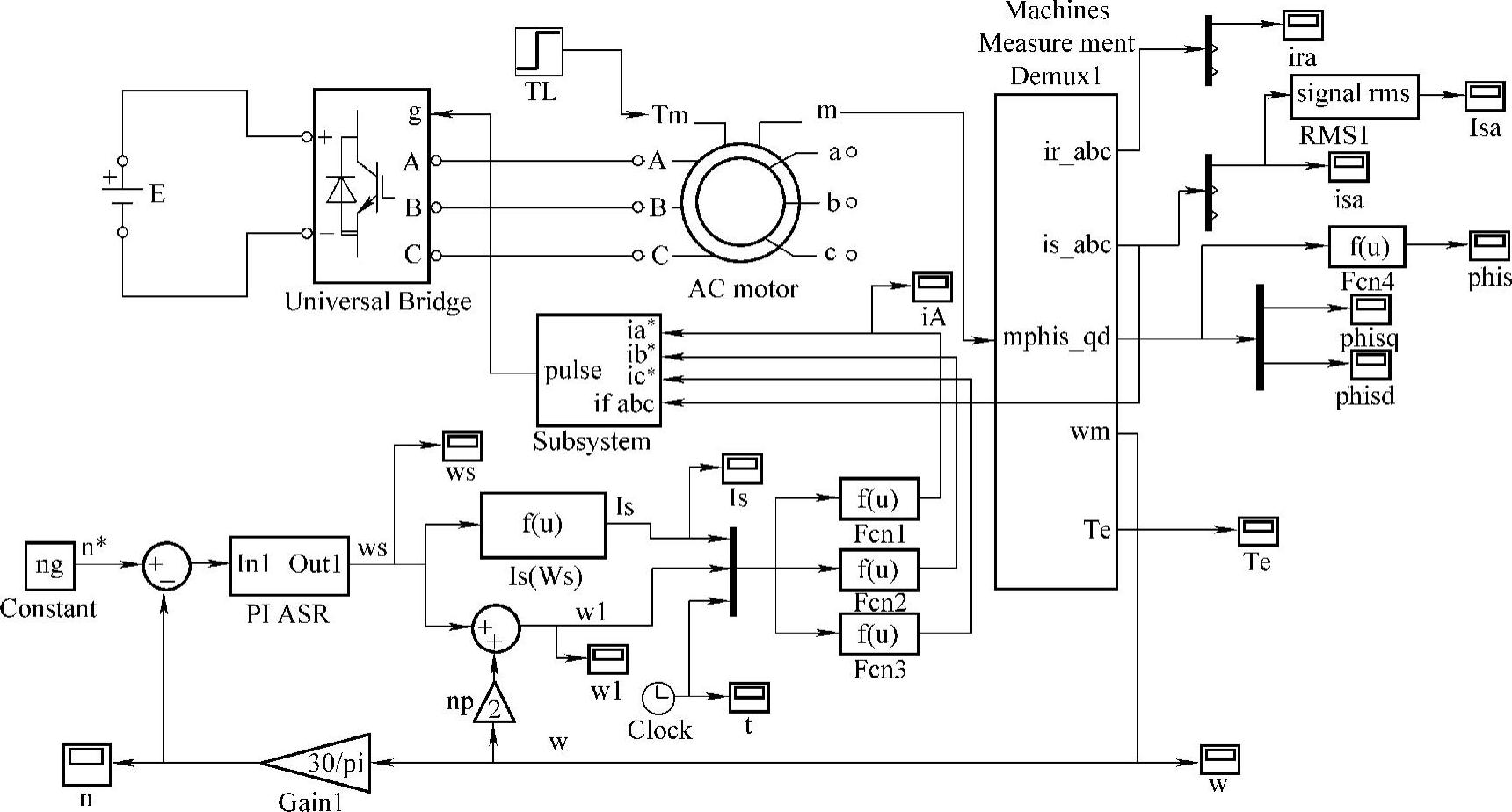
图3.26 转差频率控制系统仿真模型
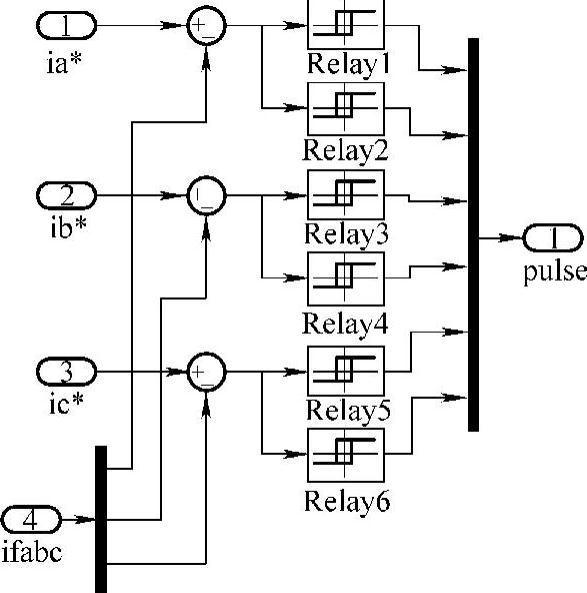
图3.27 三相滞环控制器
2.仿真分析
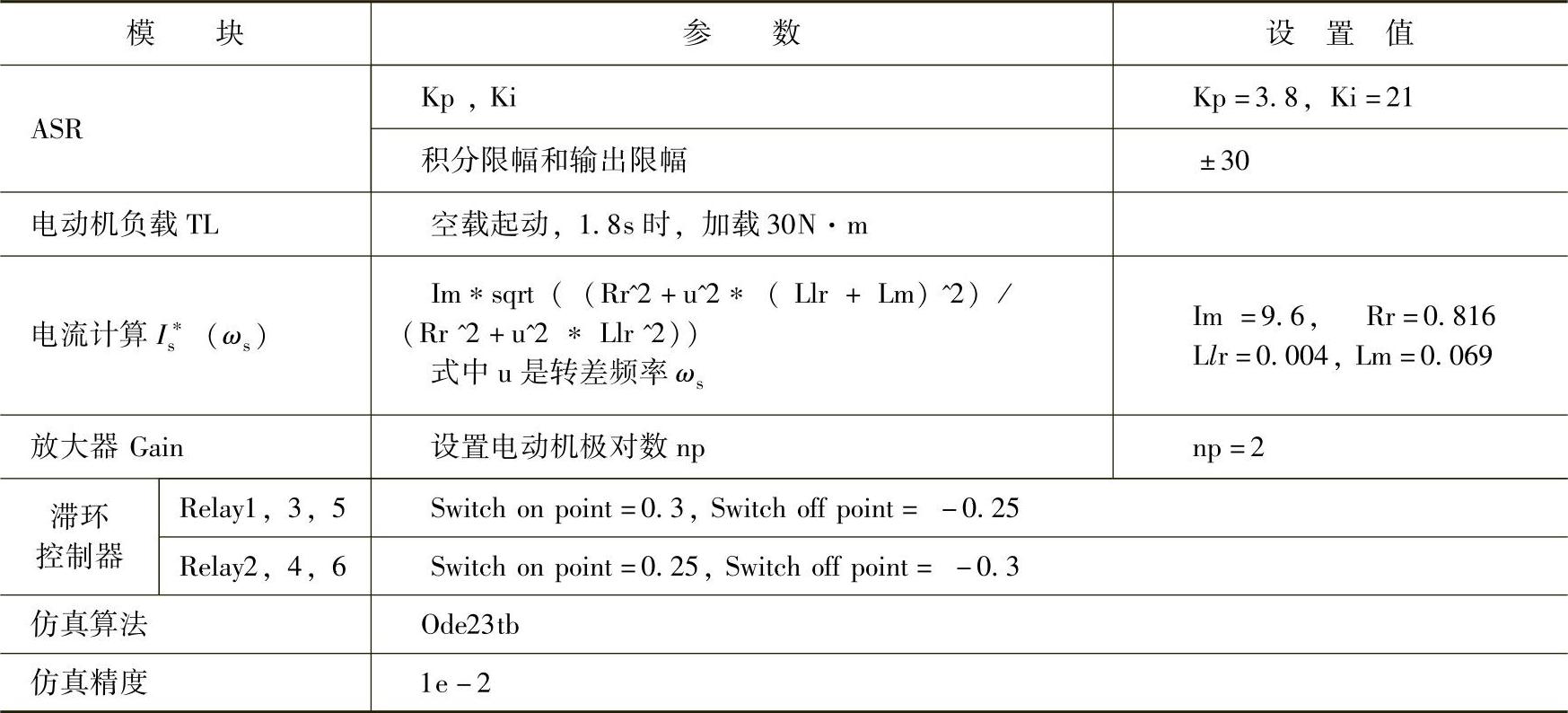
例3.2仿真异步电动机参数与例3.1相同,其他模块参数见表3.3,在转差频率控制中,确定励磁电流Im很重要,Im近似为电动机空载时的定子电流,或额定状态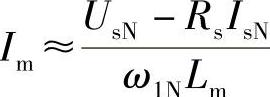 。
。
表3.3 转差频率控制模型的模块参数
 (https://www.chuimin.cn)
(https://www.chuimin.cn)
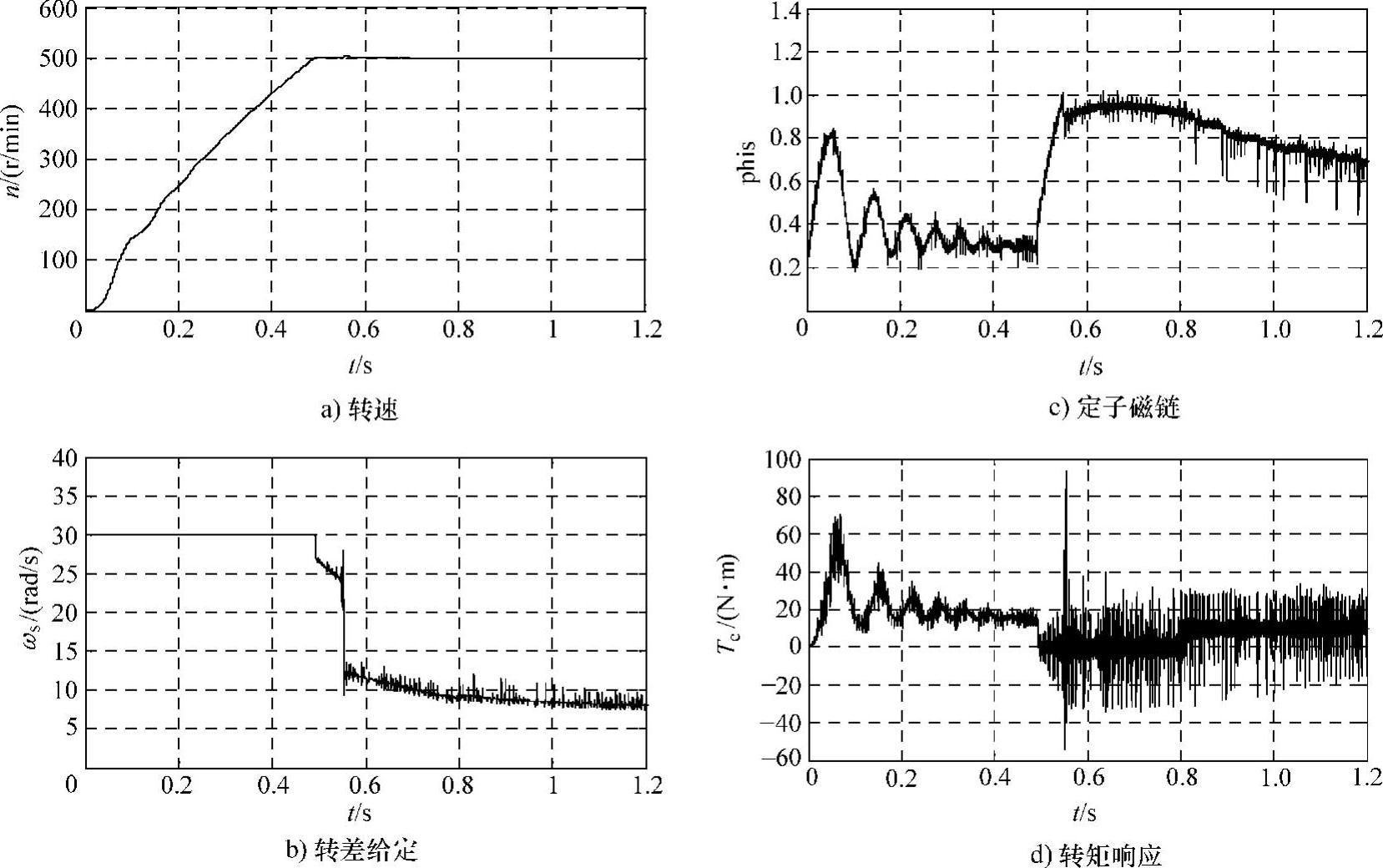
图3.28 给定500r/min时系统响应波形
在转速给定为500r/min时模型各响应波形如图3.28所示。图3.28a所示是系统的转速响应,0~0.5s是电动机起动阶段,转速基本没有超调,在0.8s时加载10N·m对转速的影响也不大。图3.28b所示是ASR输出的转差频率,起动中ASR饱和,输出为限幅值ω∗sm=30,起动后ωs∗减小。图3.28e所示是根据ωs∗计算的定子电流Is∗,Is∗的变化与ωs∗曲线对应。图3.28c所示是仿真得到的定子磁链幅值,在起动时定子磁链有较大起伏,起动后磁链比较平稳,磁链的变化对电动机转矩(见图3.28d)和电流(见图3.28f)都有影响,从图3.28d可见0.8s加载时电动机转矩的反应,但电流的变化不明显,主要是因为加载较小,电流的转矩分量较小。图3.29显示了定子磁链轨迹,磁链轨迹基本呈圆形,但是跟踪控制产生的电流毛刺使磁链轨迹不光滑。图3.30所示的转矩-转速特性反映起动中,在转速到300r/min后基本是恒转矩起动,但是在500r/min左右转矩有较大波动。此波动与转矩曲线0.55s的波动对应(见图3.28d)。该模型的转速设定不能太大,较高转速设定在转速调节阶段易引起跳频现象,使电动机运行不稳定。模型ASR的输出限幅ω∗sm对系统运行影响很大,当ω∗sm限幅值较大时,电动机起动电流和转矩大,起动速度快,但定子电流频率的急剧变化也易引起跳频;当ω∗sm限幅值较小时,起动时间长,起动较平稳,但较小的ω∗sm限制了电动机的负载能力。因为模型的计算量大,仿真需要较长时间,所以本例仿真折中设置了ω∗sm=±30。从磁链曲线比较恒压频比控制(见图3.20e)和转差频率控制(见图3.28c)的效果,差别是明显的,虽然二者都是按稳态模型控制,但转差频率控制在转速稳定后磁链的波动较小。
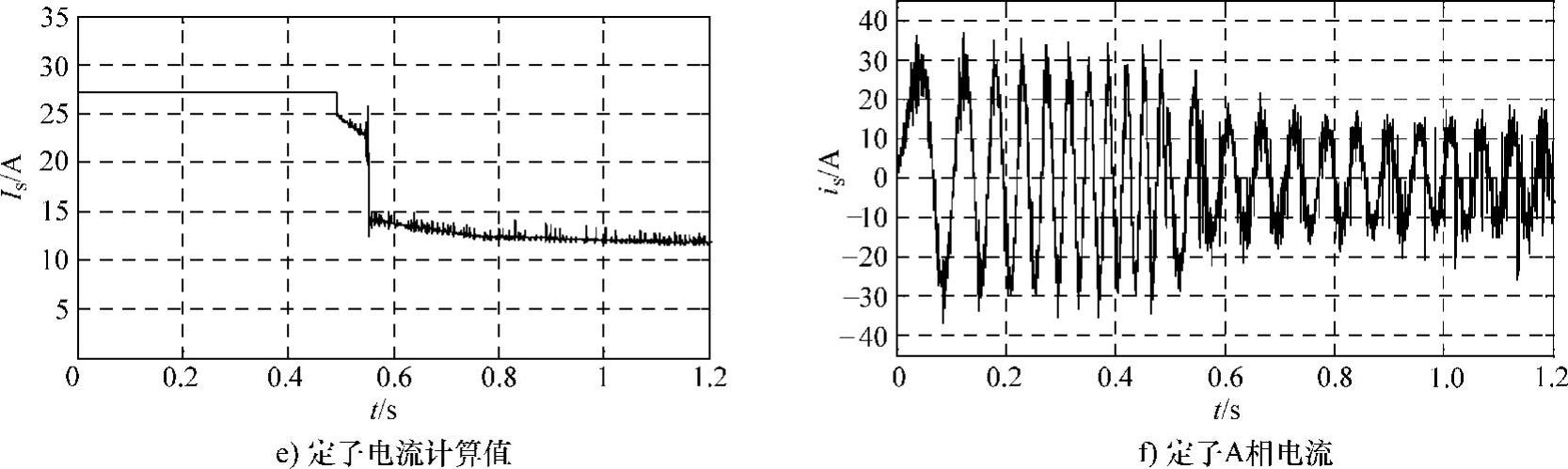
图3.28 给定500r/min时系统响应波形(续)
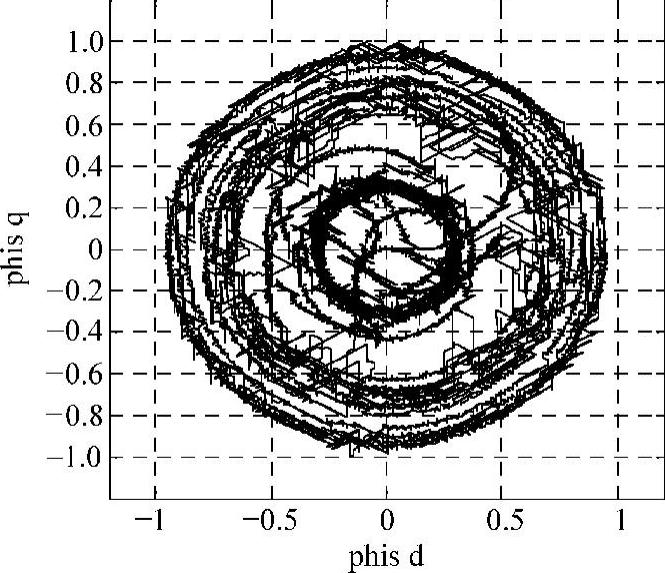
图3.29 定子磁链轨迹
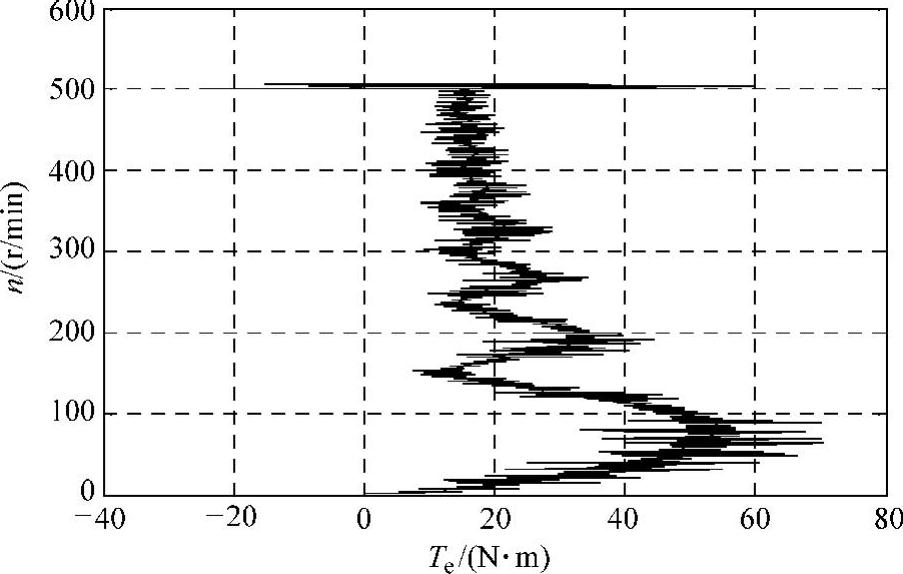
图3.30 转矩-转速特性
相关文章

图3.24所示的转速闭环转差频率控制的变频调速系统采用了交-直-交电压型电流跟踪逆变器,既是电压型逆变器又能对电流进行控制,综合了两种方式的优点。......
2025-09-29

下面以反馈控制理论为基础研究转速调节器的设计。有静差调速系统转速调节器的放大倍数 关于0型系统比例调节器放大倍数KP的设计在有静差调速系统分析时已经介绍,它可以根据满足调速指标时对转速闭环系统的转速降要求来确定。......
2025-09-29

转速闭环控制的异步电动机调压调速系统如图3.6所示。显然,闭环控制后,负载增加时由于转速闭环控制自动提高了电动机的供电电压,电动机工作在电压较高的特性曲线上,使负载增加引起的转速降减小。连接A点和C点可以得到转速闭环控制后的机械特性,该特性有较小的斜率和较大的硬度,闭环控制减小了由负载变化引起的转速降。......
2025-09-29

保证电梯安全和正常运行无论采取何种控制器件,对于电梯最终实现的控制运行要求都是一致的。此类电梯与按钮控制电梯相同,也必须由专职司机操作。电梯为无司机操纵。(三)电梯运行控制的充分必要条件根据国家相关标准的规定,不论何种形式的电梯,其安全可靠运行的要求是完全一致的。作为电梯安全可靠运行的充分必要条件主要有:1.电梯整机系统所有的安全保护系统可靠有效。......
2025-09-29

继电器控制式正转控制线路如图4-16所示。调节端子10、2、5外接电位器RP,变频器输出电源频率会发生改变,电动机转速也随之变化。3)变频器异常保护。同时继电器KA线圈也失电,3个KA常开触头均断开。在变频器运行时,若要切断变频器输入主电源,必须先对变频器进行停转控制,再按下按钮SB1,接触器KM线圈失电,KM主触头断开,变频器输入电源被切断。......
2025-09-29
图9.10 为工作台位置控制系统的工作原理图。图9.10工作台位置电液控制系统1—输入电位计;2—反馈电位计;3—放大器;4—电液伺服阀;5—液压缸;6—齿条齿轮副;7—工作台图9.11电液伺服系统的职能方块图θr—输入电位计转角;θc—反馈电位计转角;Ur—输入电位计输出端电位;Uc—反馈电位计输出端电位;i—电液伺服阀输入电流;ΔU=Ur-Uc;q—电液伺服阀输出流量;y—活塞位移......
2025-09-29
随着亮化工程的增加,控制效果也要求越来越复杂,目前对于LED控制系统,有多种分类方式,按其工作性质分为网络控制系统、总线控制系统和驱动型控制系统三类。DMX512也是目前应用最广泛的LED控制系统。串行LED控制器需要在LED的光源板配有移位寄存器,超过512路需要加分控器。LED必须是共阳极连接法,控制器控制阴极,控制器不包括低压电源。......
2025-09-29

LED控制系统由控制系统和驱动系统两大部件组成。LED控制系统内置高性能单片微型控制芯片,控制器通过内部控制程序向LED驱动芯片发送控制信号和数据,LED驱动芯片根据控制信号和数据的要求,产生相应的动作,从而对每一路红、绿、蓝LED实现单独的控制。驱动系统驱动系统的功能是接收颜色数据并驱动LED按该数据所表示的亮度值显示。LED控制系统承载着控制的总功能,在LED越来越被广泛使用的今天,其功能也将越来越强大。......
2025-09-29
相关推荐