图1.43所示是晶闸管-直流电动机开环直流调速系统主电路模型,模型中主要模块提取路径见表1.11。现以例1.2的双闭环控制直流调速系统为例说明。......
2025-09-29
1.恒压频比VVVF调速系统仿真模型
图3.13所示的恒压频比控制VVVF变频调速系统仿真模型如图3.15所示,模型主电路由逆变器SPWM Bridge和异步电动机AC motor模块组成。为简化模型逆变器直流测电源,用定压源模块E代替了不控整流器和滤波电容。逆变器SPWM Bridge由PWM Generator模块提供驱动信号。异步电动机负载由TL模块设定,通过电动机测量端m连接的Machines Demux模块可观测电动机的11项参数,模型选用了其中定子三相电流(is_abc)、转子三相电流(ir_abc)、定子磁通、转速和转矩五项参数。模型中,多路测量仪Multimeter用于观察和记录逆变器的输入直流电压和输出三相交流电压(线电压)。
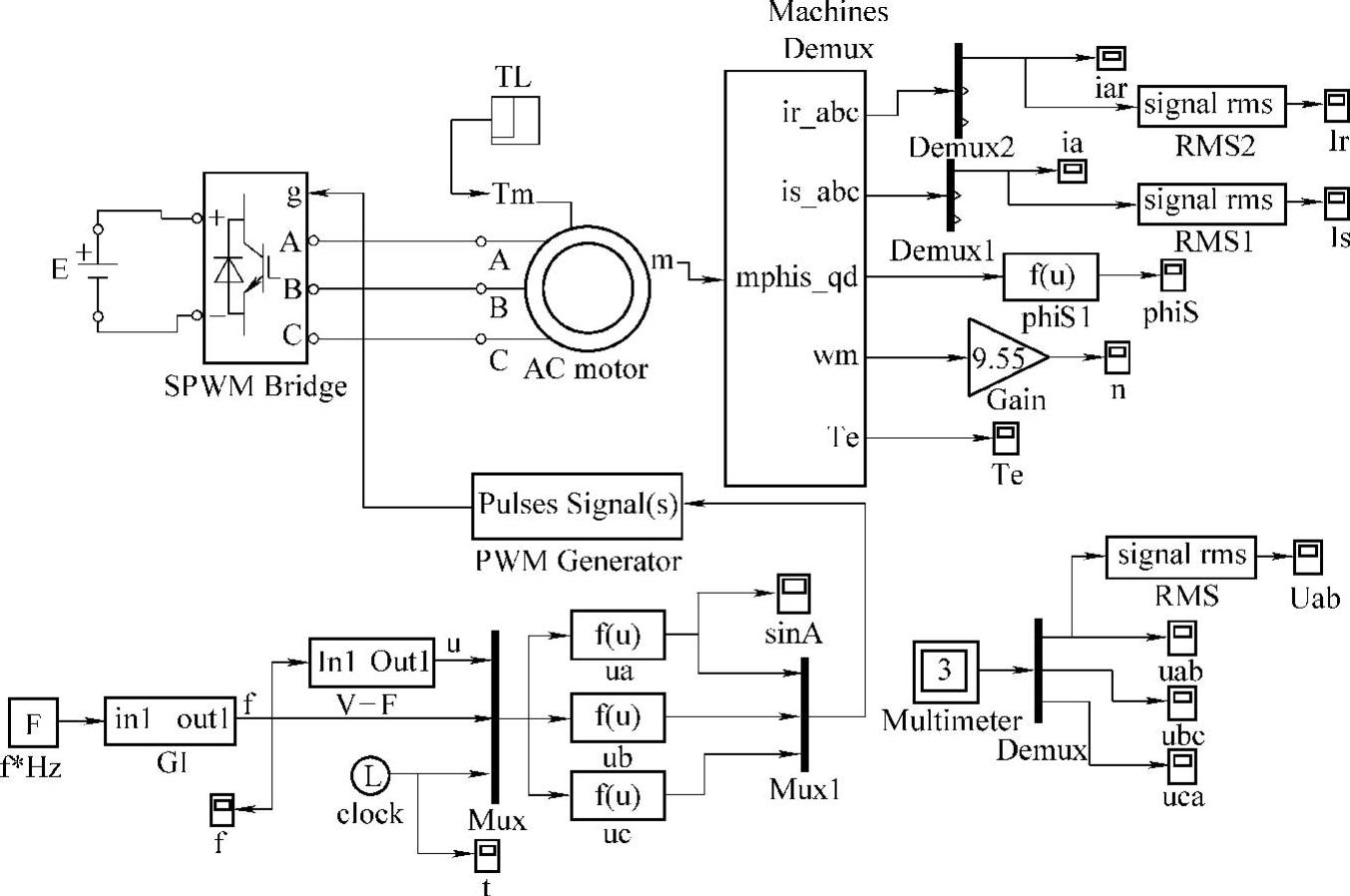
图3.15 恒压频比控制VVVF变频调速系统仿真模型
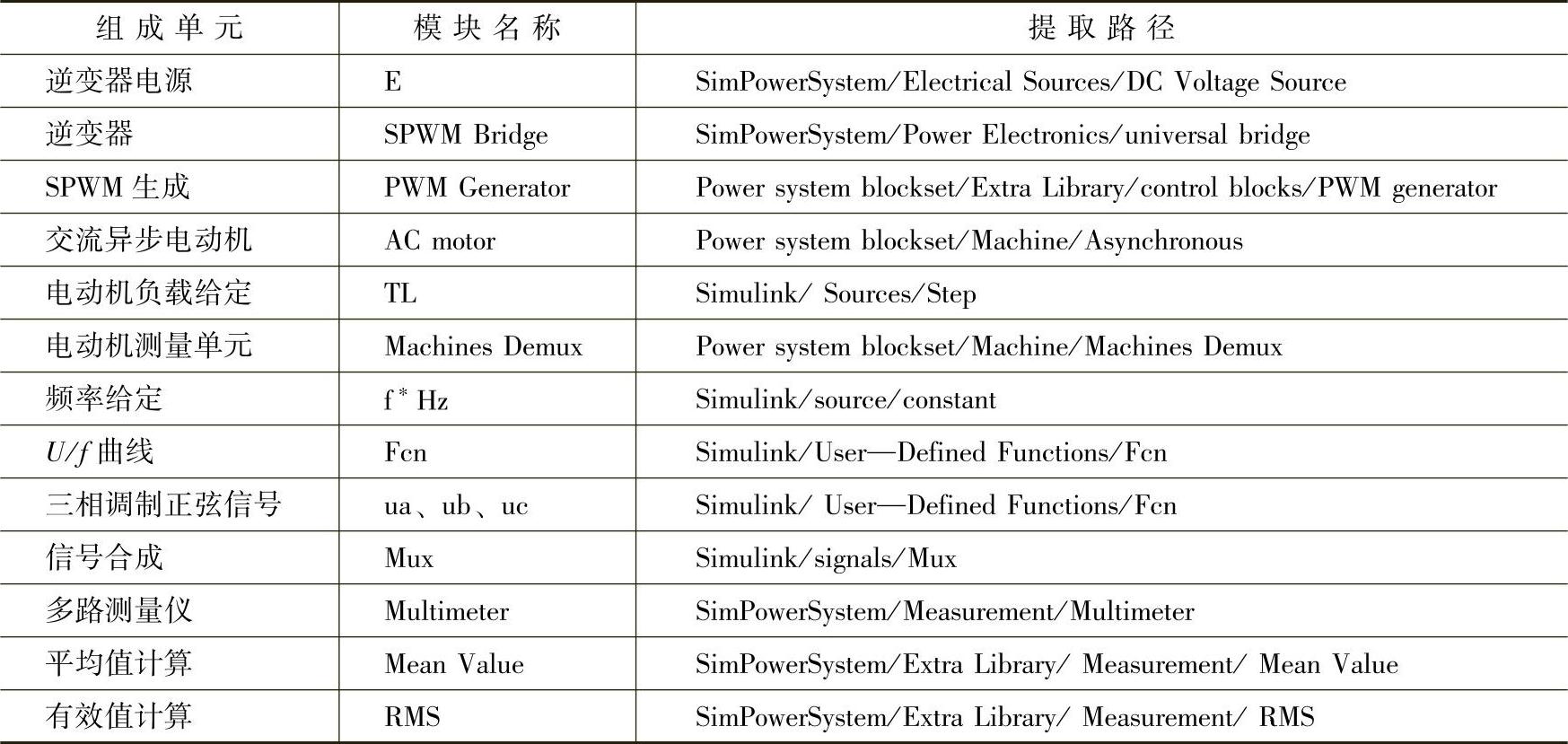
模型的控制部分由f∗Hz模块设定电动机频率,GI模块限制升频速率,V-F模块设定压频比(U/f曲线),函数模块ua、ub、uc产生三相调制波[见式(3.35)]。模型的主要模块提取路径见表3.1。
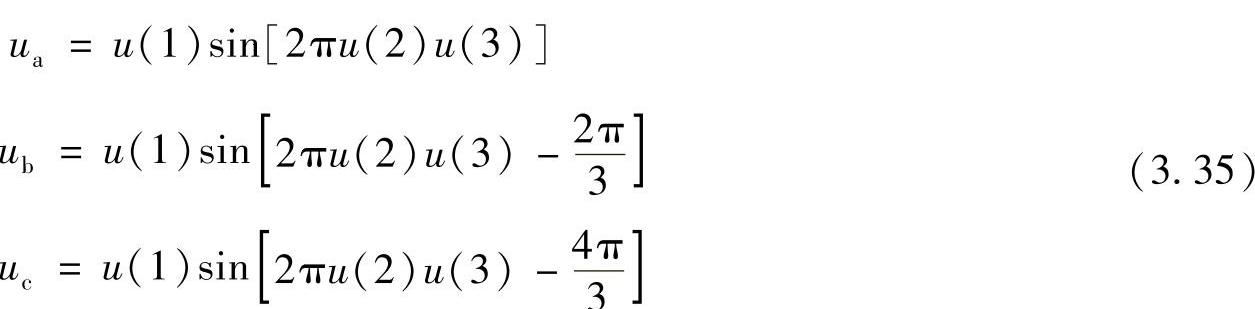
表3.1 变频器-电动机系统模型的主要模块提取路径
(1)GI模块 GI模块的作用是限制起动时逆变器的升频速度,升频速度过快易引起跳频现象。GI模块结构如图3.16所示。模块是一个带反馈的积分电路,设定放大器Gain放大倍数可以调节输出频率信号的上升速度,反馈使Out1端输出频率的稳定值与In1端输入频率相同。
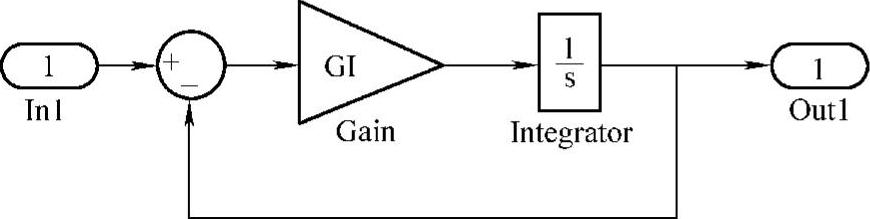
图3.16 GI模块结构
(2)V-F模块 V-F模块用于设定压频比,使逆变器电压随频率调节,在调频中保持气隙磁通不变。V-F模块结构如图3.17所示。模块中函数模块Fcn1用于产生与频率信号f相应的电压信u∗,函数的表达式为

式中,UN为电动机额定电压;U0为起动时补偿定子电阻压降的电压;fN为电动机额定频率。

图3.17 V-F模块结构
因为PWM Generator模块有调制信号的幅值限制,电压调制信号的幅值不能大于1,模型中用放大模块Gain1调整Fcn1模块的输出信号幅值,并且经过Saturation1模块限幅以保证V-F模块输出不大于1。电压u、频率f和时间t信号经Mux模块汇总为一维矢量x=[u(1),u(2),u(3)],式中u(1)、u(2)、u(3)依次表示电压、频率和时间三个变量。经汇总的变量输入三个函数模块(Fcn)产生三相调制信号ua、ub、uc,再经Mux1输入PWM Generator模块产生逆变器SPWM Bridge的控制脉冲。(https://www.chuimin.cn)
(3)磁链观察通过电动机测量模块Machines Demux可以观察电动机定子和转子磁链。在图3.15所示模型中,通过函数模块phis1计算定子磁链Ψs,计算表达式为
 。式中,u(1)为定子磁链的直轴分量phisd,u(2)为定子磁链的交轴分量phisq。
。式中,u(1)为定子磁链的直轴分量phisd,u(2)为定子磁链的交轴分量phisq。
2.恒压频比控制调速系统仿真
例3.1仿真异步电动机恒压频比控制调速系统,电动机额定参数为17kW、380V、27A、4极、1450r/min。
(1)参数设置 逆变器和异步电动机模块参数设置如图3.18和图3.19所示,其他控制模块参数设置见表3.2。
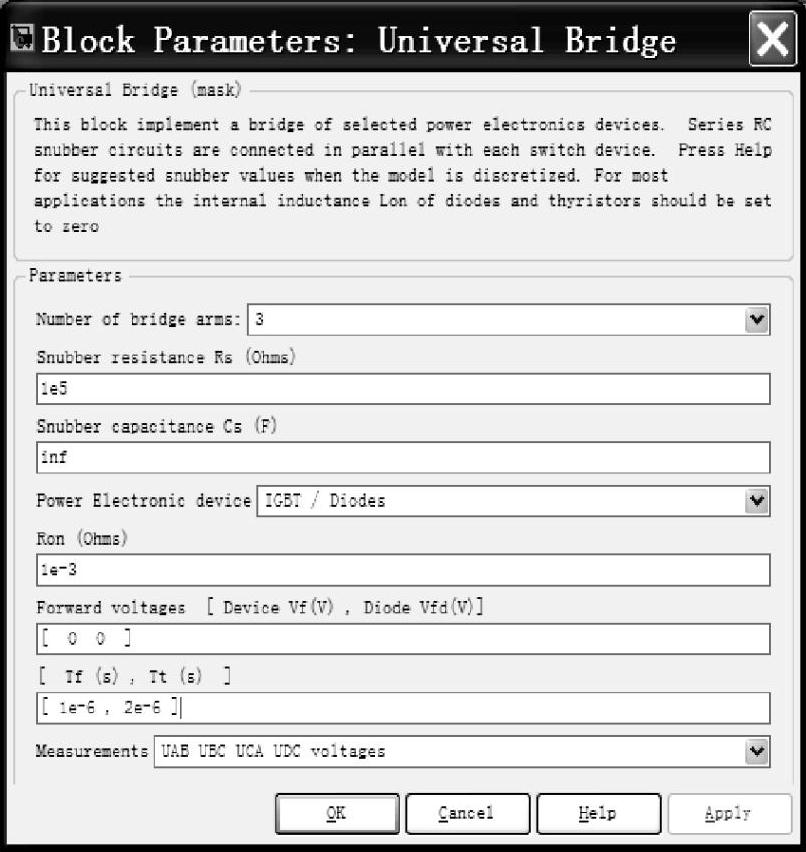
图3.18 逆变器模块参数设置
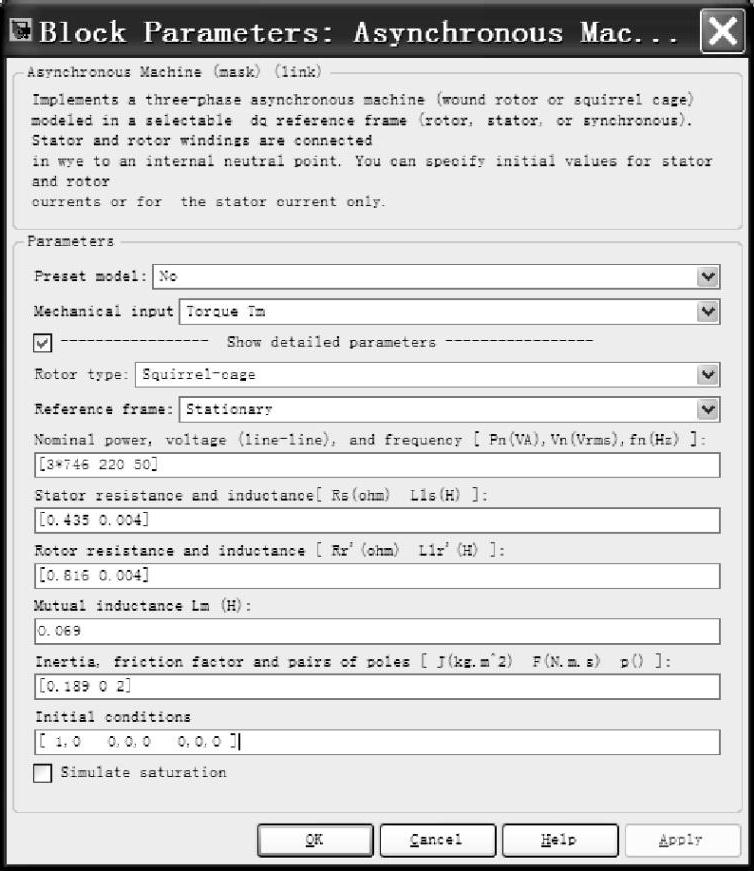
图3.19 异步电动机模块参数设置
表3.2 恒压频比控制VVVF系统模块参数
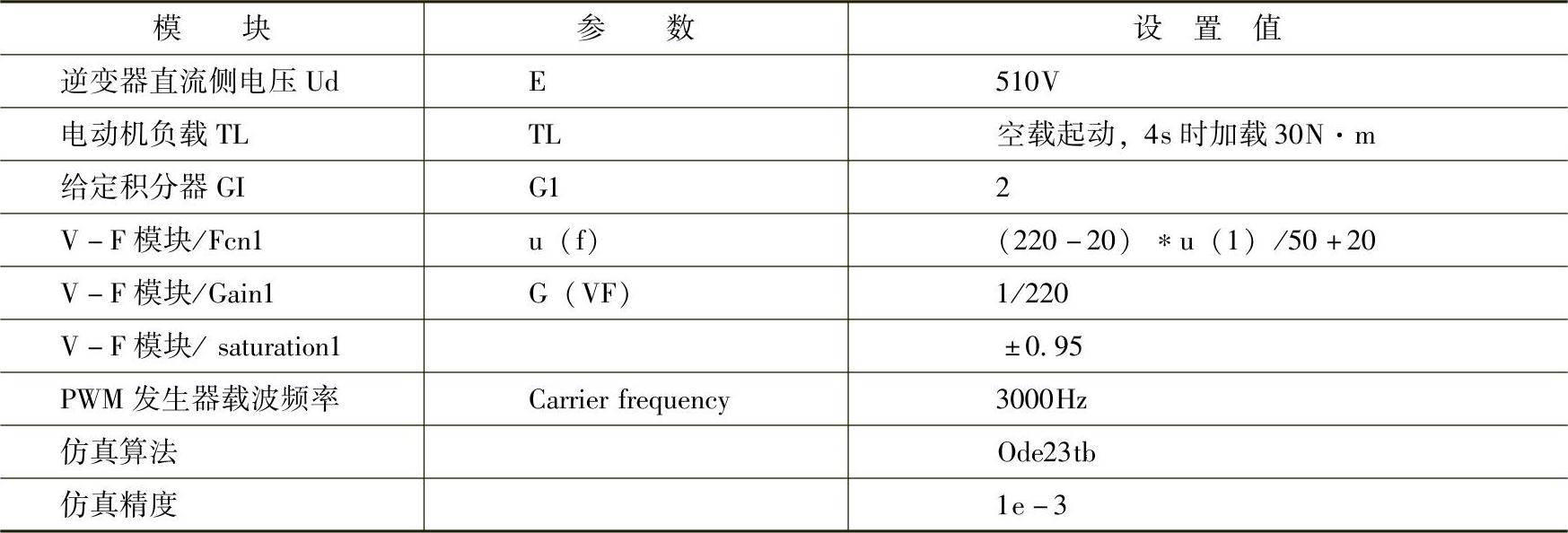
(2)仿真和分析 电动机在给定频率为50Hz、空载起动、4s时加额定负载30N·m的情况下,观察到的波形如图3.20所示。从GI模块输出的升频曲线(见图3.20a)可看到,频率上升到给定的50Hz有3s的过程。图3.20b所示是一相电压的调制波,调制电压信号是幅值随频率增大的正弦波。图3.20c所示是正弦调制下经计算的电动机定子线电压有效值曲线,起动时Ul≈100V,3s左右Ul达到380V,与V-F曲线控制相符。从电动机磁链曲线(见图3.20e)可以看到恒压频比控制还不能很好地保持磁通稳定,气隙磁通不稳定会造成转矩较大波动(见图3.20f),这也是转速波动(见图3.20d)的重要原因。电动机的起动电流较大(见图3.20g),并且在起动中磁通有从0上升的过程,产生的转矩较小,限制了转速的上升速度。图3.20h所示是电动机工作时的转矩-转速特性,磁链大幅度变化引起的
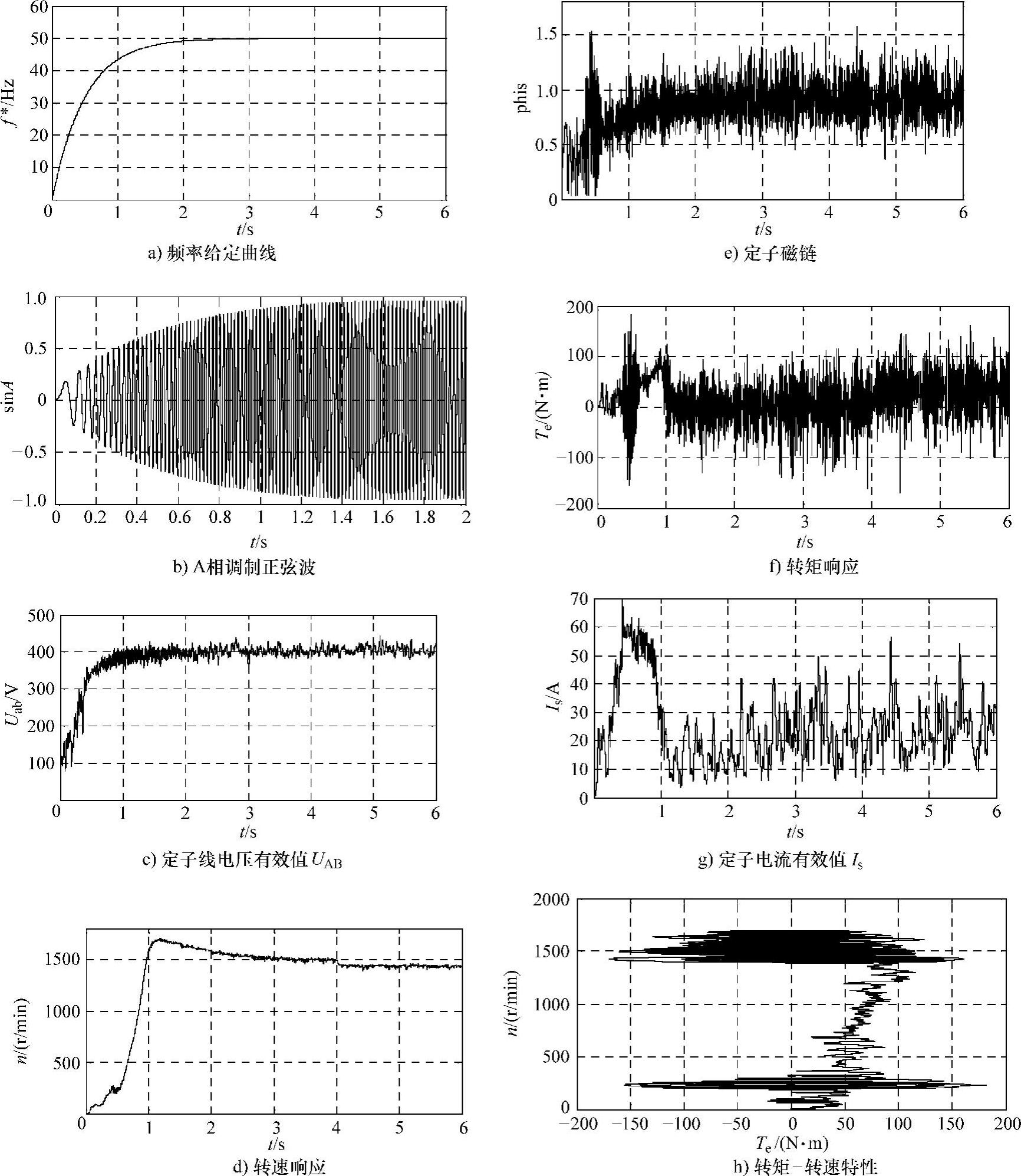
图3.20 VVVF起动过程(50Hz)
转矩波动对转矩-转速特性有很大影响。图3.21所示是给定f∗为40Hz和30Hz时的转速波形,调节f∗可以改变电动机的稳定转速,实现了VVVF变频调速,在4s加载时转速都有下降,这是转速开环控制时必然存在的。
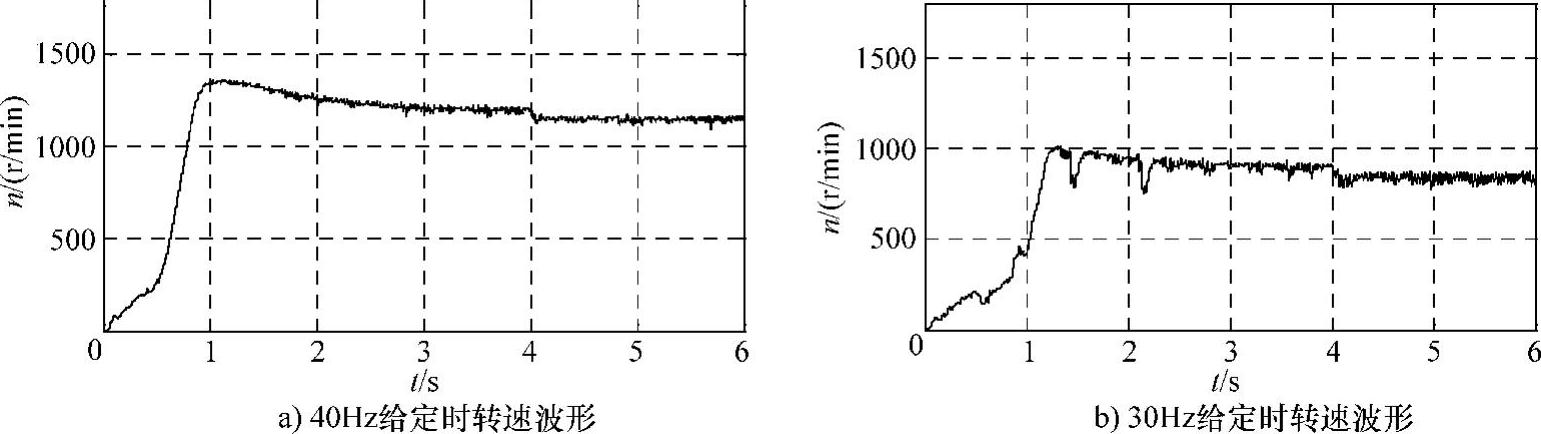
图3.21 VVVF变频调速的转速波形
相关文章

图1.43所示是晶闸管-直流电动机开环直流调速系统主电路模型,模型中主要模块提取路径见表1.11。现以例1.2的双闭环控制直流调速系统为例说明。......
2025-09-29

表1.13 双闭环控制直流调速系统电流调节器参数和滤波器参数3.仿真与分析设置双闭环控制直流调速系统模型参数后,再设置仿真参数,仿真算法取ode15s,仿真时间预定为3s,启动仿真得到的转速和电枢电流波形如图1.56所示。......
2025-09-29

本桥逆变阶段电枢回路的电压方程为式中,Udβ为逆变状态变流器输出电压;E为电动机反电动势;Id为电枢电流。该阶段电流图2.6 反组桥建流阶段图2.7 回馈制动阶段在回馈制动中随着转速下降,反电动势E下降,在E下降的同时,应使Udβ同步下降,以保持最大电流Idm制动,使制动速度最快。到制动末期转速已经很低,即使β→90°、Udβ→0,反电动势E也不能再维持最大电流,Id将减小直到0,随之转速也下降到0,制动过程结束。......
2025-09-29

自动弱磁控制直流调速系统是基速以下采用调压调速,基速以上自动进行弱磁升速的调速系统,系统的组成如图2.29所示。图2.29 自动弱磁控制直流调速系统的组成系统弱磁控制过程如下:调节转速给定Un信号,转速上升,在转速没有达到额定转速时,因为电动势反馈信号Ue
2025-09-29

图1.10 调压调速静特性调速范围与静差率的关系 生产机械一般不仅要求转速能在一定范围内调节,并且要求负载等变化对转速的影响小,以保证生产过程的稳定性,提高产品质量。也就是说,要求在一定调速范围内,尽管负载变化,但静差率都小于规定指标。调速系统主要的抗扰性能指标有动态降落ΔCmax和恢复时间tv等,如图1.11b所示。......
2025-09-29
如果仅从降低浴比的角度来讲,染液循环系统所占用的空间越小越好,因为它可以减少存水量,但就实际情况来看,过分地减少循环系统的存水量,就会使自由循环染液减少,带来一些不利影响。这一点对超低浴比染色设备与生产工艺来说是非常重要的,也是最难的要求。GF241XL超低浴比染色机成功解决了这个染色问题并推向市场。表5-1常用纤维的吸水量与循环液量在低浴比染色染液的实际循环系统中,设备性能的改变是很关键的因素。......
2025-09-29

直流调速系统主要由直流调压-直流电动机主电路和控制两部分组成。仿真时,由于主电路对系统的影响很大,宜分步进行,应首先仿真主电路,在直流调压-直流电动机主电路仿真结果符合要求后,再仿真完整的系统。下面在直流调压-直流电动机主电路即开环系统的基础上介绍双闭环控制直流调速系统的仿真。......
2025-09-29

图2.28 调压调速和弱磁调速稳态参数关系虽然额定功率、额定电压和额定电流是电动机长期运行不能超过的,但是额定转速有一定的上调裕量,因此,采用弱磁升速可以扩大电动机的调速范围。即在调速范围要求较大的场合采取调压调速和弱磁调速相结合的方法,在额定转速以下采用调压调速,在额定转速以上采用弱磁调速,以扩大调速范围。......
2025-09-29
相关推荐