比较晶闸管可逆系统,PWM可逆系统控制较为简单。两者制动过程都有电感续流和回馈制动阶段,不同的是PWM可逆系统在一个调制周期里VT1、VT3和VT2、VT4交替导通,电流有上升和下降(续流)的波动。PWM调速系统采用不控整流器,回馈制动时电能只能在电容中存储或在泵升电压限制电路的电阻R3上消耗,属于能耗制动,这是其不足,因此PWM可逆系统主要应用在中小功率调速场合。......
2023-06-19
在转速给定Un∗为“+”时,ASR和ACR输出都为“+”,PWM调制器输出的驱动脉冲G1、G3的宽度大于G2、G4的宽度,在VT1、VT3导通时电流Id自滤波电容C“+”端→VT1→电机电感(La)→VT3→电容C“-”端,电流上升电感储能增加;在VT1、VT3关断时,电感La电动势使电流经电动机→VD2→电容C→VD4续流,电流下降电感储能减小(见图2.21a)。同时,AB端输出平均电压Ud和电枢平均电流Id为“+”,电动机正转。在Un∗为“-”时,ASR和ACR输出都为“-”,PWM调制器输出的驱动脉冲G2、G4的宽度大于G1、G3的宽度,在VT2、VT4导通时Id电流自滤波电容C“+”端→VT2→电机电感(La)→VT4→电容C“-”端,电流上升;在VT2、VT4关断时经电动机→VD1→电容C→VD3续流,电流下降(见图2.21c)。同时,平均电流Id为“-”,AB端平均电压Ud为“-”,电动机反转。在稳定状态时电动机电流是脉动的,但是因为PWM斩波器调制频率很高,所以这种波动实际很小,而且依靠电枢电感La电流就能连续。
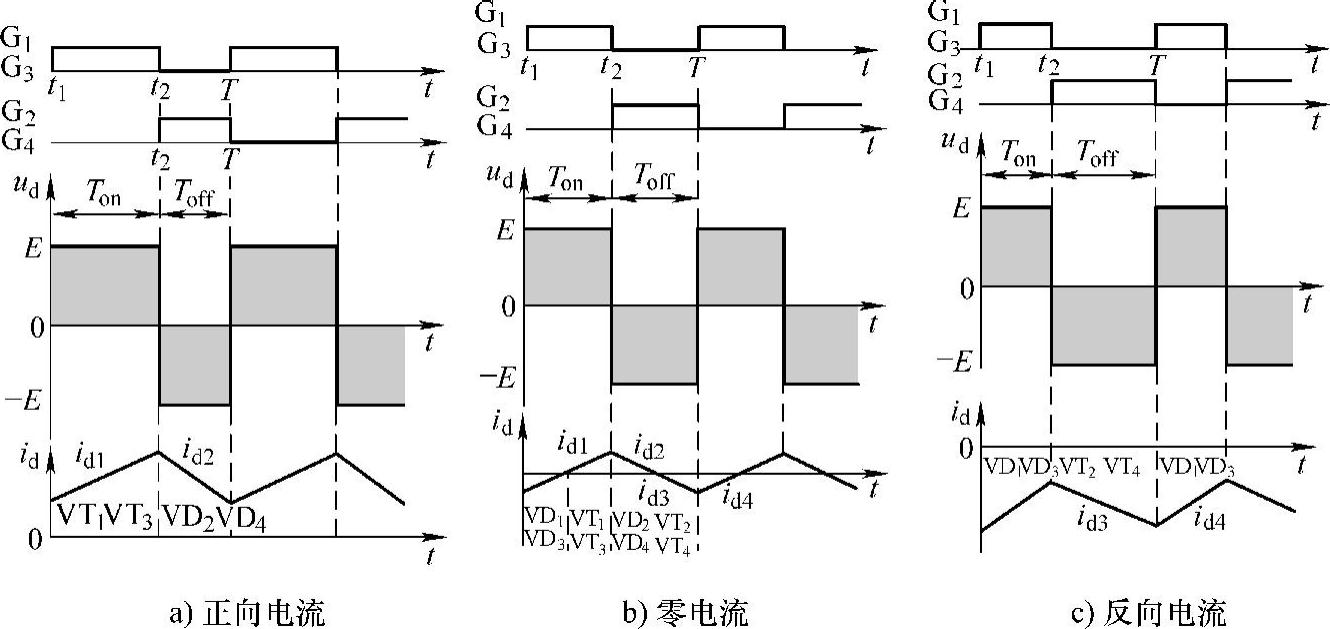
图2.21 PWM可逆系统电流波形
当Un∗为0时,ASR和ACR输出都为0,PWM调制器输出驱动脉冲G1、G3宽度与G2、G4脉冲宽度相等,电动机平均电流为0,电动机不转。但是实际电流是脉动的(见图2.21b),脉动电流使电动机产生微振,这种微振可以减小电动机在正、反转起动时的静摩擦力,提高起动的快速性。
有关电机运动控制系统的文章

比较晶闸管可逆系统,PWM可逆系统控制较为简单。两者制动过程都有电感续流和回馈制动阶段,不同的是PWM可逆系统在一个调制周期里VT1、VT3和VT2、VT4交替导通,电流有上升和下降(续流)的波动。PWM调速系统采用不控整流器,回馈制动时电能只能在电容中存储或在泵升电压限制电路的电阻R3上消耗,属于能耗制动,这是其不足,因此PWM可逆系统主要应用在中小功率调速场合。......
2023-06-19

直流PWM双闭环可逆调速系统仿真模型如图2.22所示,模型中电动机和调节器模块与晶闸管可逆系统相同,直流斩波器使用Universal Bridge模块,模块设置为二桥臂,如图2.23所示。图2.25 直流PWM双闭环可逆调速系统波形图2.26 无电压限制时电容电压图2.27 电阻R电流......
2023-06-19

图8-8比例-积分调节电路3.应用说明与V-M调速系统相比,PWM-M调速系统的开关频率较高,仅靠电枢电感的滤波作用就足以获得脉动很小的直流电流,电枢电流容易连续,系统的低速运行平稳,调速范围较宽,可达1∶1000左右。同时应该指出的是,受到器件容量的限制,直流PWM-M调速系统目前只用于中、小功率的系统。......
2023-06-25
本桥逆变阶段电枢回路的电压方程为式中,Udβ为逆变状态变流器输出电压;E为电动机反电动势;Id为电枢电流。该阶段电流图2.6 反组桥建流阶段图2.7 回馈制动阶段在回馈制动中随着转速下降,反电动势E下降,在E下降的同时,应使Udβ同步下降,以保持最大电流Idm制动,使制动速度最快。到制动末期转速已经很低,即使β→90°、Udβ→0,反电动势E也不能再维持最大电流,Id将减小直到0,随之转速也下降到0,制动过程结束。......
2023-06-19

例如图2.1所示的升降机可逆调速系统,电动机由一台电力电子变流器供电,采用转速和电流双闭环控制。直流可逆调速系统主电路如图2.2所示。其中,图2.2a所示为两台晶闸管变流器反并联的可逆电路,图2.2b所示为H形PWM变流器的可逆电路。......
2023-06-19

图2.2a所示的晶闸管可逆系统,从“环流”角度出发可以分为有环流控制系统和无环流控制系统两类。采用这种控制模式的可逆系统称为无环流可逆系统。现在的直流电动机可逆调速系统主要采用逻辑无环流控制方式,有环流控制和错位无环流可逆系统已逐渐淘汰,因此下面主要介绍逻辑控制的无环流可逆调速系统。......
2023-06-19

图2.3 晶闸管三相整流器可逆电路环流晶闸管直流可逆调速系统的主电路由两台变流器反并联组成,当两台变流器工作时,在它们之间会产生环流。当VR组工作在整流状态时,LP3和LP4同时流过直流电流IdF和脉动环流ip,电抗器饱和,由LP1、LP2限制环流。图2.4 三相桥反并联变流器脉动环流......
2023-06-19
相关推荐