图2.9 逻辑无环流可逆调速系统的组成系统的控制主要由转速闭环和电流闭环组成,包含了一个转速调节器,两个电流调节器。......
2023-06-19
1.晶闸管逻辑无环流可逆系统模型
逻辑无环流可逆直流调速系统(见图2.9)仿真模型如图2.15所示,模型中直流电动机(DC motor)电枢连接了两台反并联的晶闸管整流器模块(thyristor bridge-F和thyristor bridge-R),两台晶闸管整流器共用一台三相交流电源。系统控制部分由正、反转速度给定模块(Un∗1和-Un∗2),给定选择开关(Manual Switch),给定滤波器(N-Filt),转速调节器(PIASR)和电流给定(i-Filt),以及两路电流调节器(PIACR1和PIACR2),移相控制(Fcn-F和Fcn-R)和触发器控制模块(6-Pulse-F和6-Pulse-R)组成。其中,反组电流给定信号经过倒相器模块Gain1,使两台晶闸管整流器控制角始终保持α=β状态,两套触发器是否有脉冲输出受逻辑控制模块DCL的输出信号UblF和UblR控制。双击选择开关模块(ManualSwitch)可以切换正转和反转。电动机可逆运行时,负载转矩应随转向改变符号,因此转矩给定环节增加了转向判别模块Sign,在正转时使TL为“+”,反转时TL为“-”。
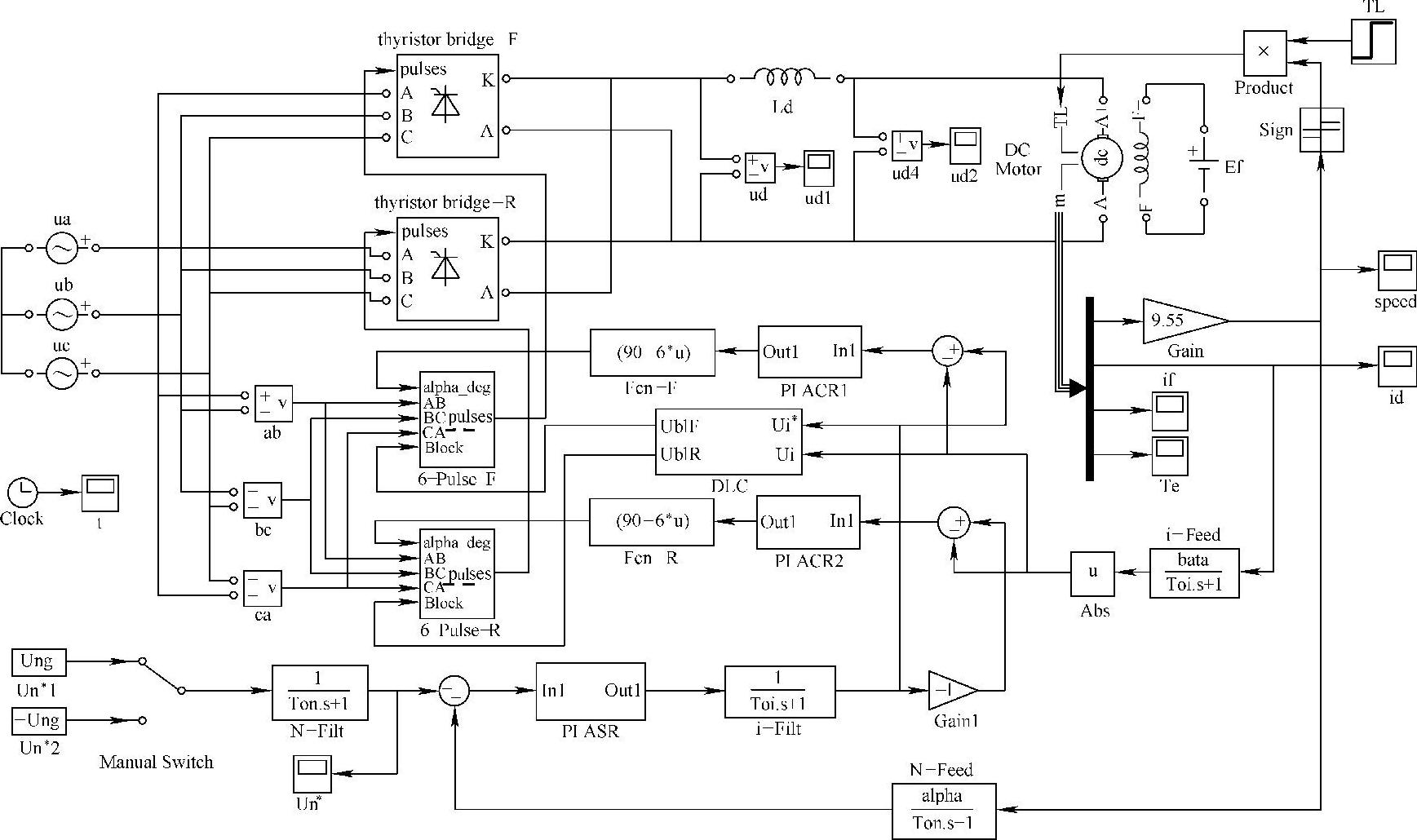
图2.15 晶闸管逻辑无环流可逆直流调速系统仿真模型
2.逻辑控制模块
逻辑控制模块DCL是逻辑无环流控制的关键模块,用MATLAB功能模块组成的逻辑控制器仿真模型如图2.16所示,模块的功能参见图2.10。模块输入信号Ui∗取自转速调节器输出,Ui是电枢电流的反馈信号,模块的输出UblF、UblR,分别连接到两个触发模块的Block端,控制触发器的脉冲输出,UblF、UblR为“0”,触发器输出脉冲;UblF、UblR为“1”,封锁触发器输出脉冲。
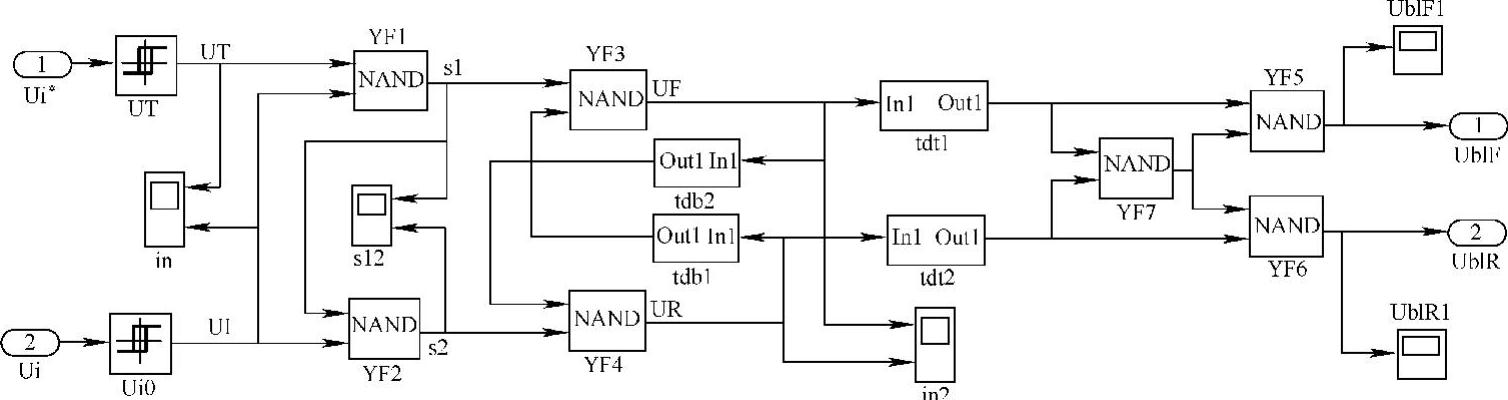
图2.16 逻辑控制器仿真模型
DLC的UT和Ui0模块用于电平检测,与非门模块YF1~YF4用于逻辑判断,YF5~YF7作用是连锁保护,模块tdb1、tdb2用于关断延时,tdt1、tdt2用于开通延时,延时模块结构如图2.17所示。逻辑控制器模型的模块提取路径见表2.2。

图2.17 延时模块延时0.002s
表2.2 逻辑控制器模型的模块提取路径

3.模型仿真
模型电源、晶闸管整流器、电动机、转速调节器、电流调节器等参数同例1.2,逻辑控制器延时取0.002s,仿真算法为ode23tb。电动机0.1s时加额定负载为171N·m,启动仿真后得到转速和电枢电流波形如图2.18所示。从转速波形(见图2.18a)可见,起动后0.1s加载,1s后电动机转速稳定在1360r/min左右,在2s时双击选择开关(Manual Switch),电动机正转减速并反转,3.5s时基本达到反向给定转速1360r/min。电流波形(见图2.18b)表明,起动时电流迅速上升,0~0.6s间保持最大电流恒流起动,随转速接近给定,电流下降到136A左右,1s后基本进入正转稳定状态。2s时发出反转指令,电流经历了正向下降反向增加的过程,这个时间是短暂的,接着是反向恒流升速和电流的调节过程,因为正反转的速度给定相同,所以电动机正转和反转稳定后的转速和电流相同,方向相反。图2.19所示是逻辑控制器输出的触发器控制信号波形,按触发器模块要求,block端为0电平时,触发器输出脉冲,block端为1电平时,触发器封锁停发脉冲。在2s前UblF为0,正组触发器输出脉冲,反组UblR为1,反组触发器封锁。2s后UblR信号为0,UblF为1,电动机开始反转过程。UblF和UblR信号始终相反,保证了两组整流器不会同时工作,总有一台是封锁的。
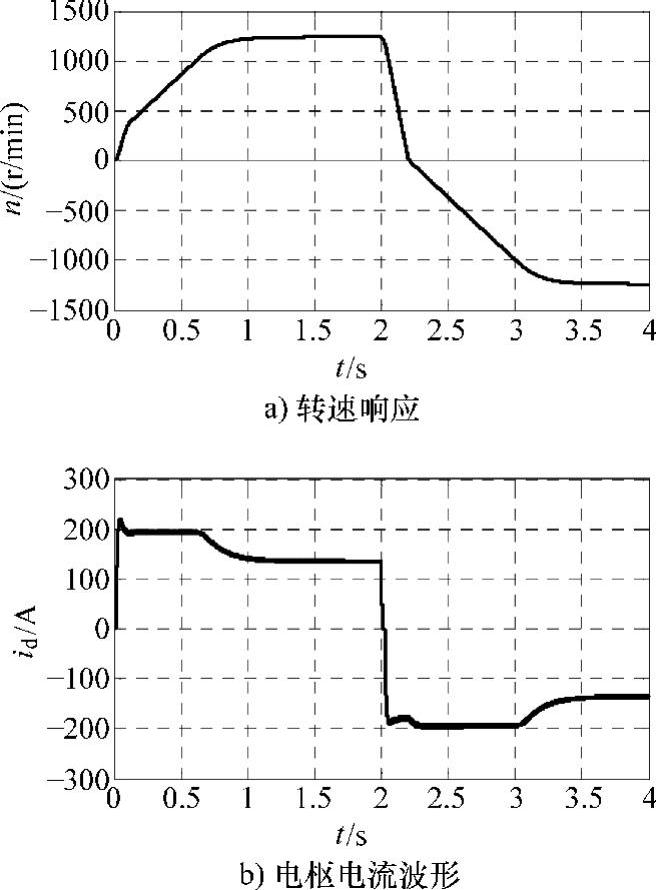
图2.18 可逆调速波形
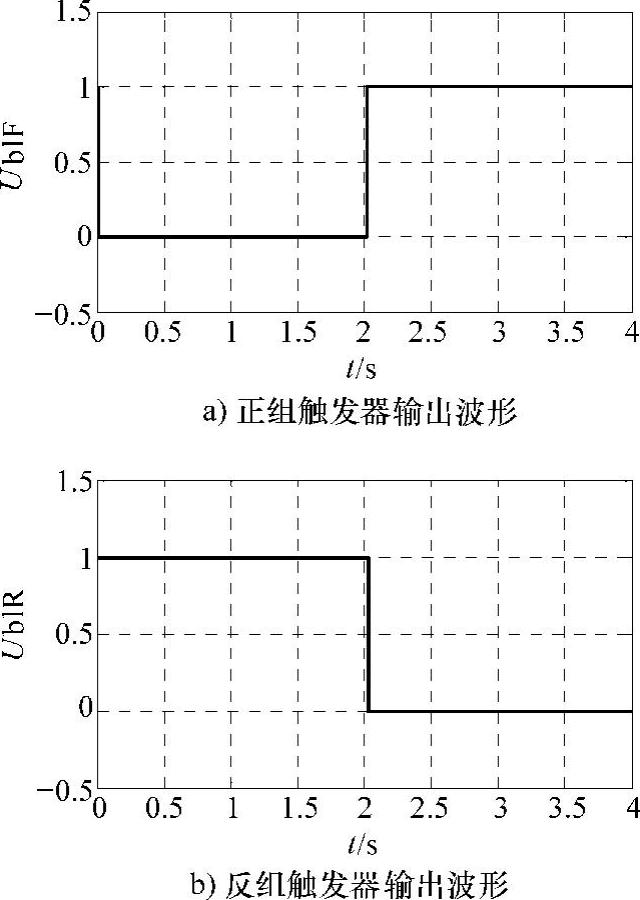
图2.19 逻辑控制器输出波形
有关电机运动控制系统的文章

由于东西方文化的差异和思维形式、方法的反差,在科学逻辑和模型V&V的讨论方面并没有出现类似西方的百家争鸣的现象。在严复看来,名学(逻辑)作为“求诚之学”,就是研究如何获得“真实无妄之知”的学问。严复在这里所说的名学(逻辑学),实际上也包括认识论。严复关于认识模型方面的思想,基本上是在近代西方实证的自然科学和唯物主义经验论的基础上建立起来的。......
2023-08-15

电路设计及仿真模拟的传统工具主要有Cadence公司的Spectre、SYNOPSYS公司的HSPICE以及Mentor公司的Eldo三大类。尤其是其具有图形界面的电路图输入方式,使其成为目前最为常用的CMOS模拟集成电路设计工具。与Cadence公司的Spectre图形界面输入不同,HSPICE通过读取电路网表以及电路控制语句的方式进行仿真,是目前公认仿真精度最高的模拟集成电路设计工具。Eldo可以方便地嵌入到目前的其他的模拟集成电路设计环境中,并可以扩展到混合仿真平台ADMS,进行数字、模拟混合仿真。......
2023-06-26
本书研究的生产仿真系统, 需要仿真数据库与企业的生产制造系统相连接, 可以实时获取生产制造系统中的当前生产线状态数据, 为仿真系统提供仿真的实时初始化数据。录入仿真系统的未来事件数据, 根据仿真模型进行生产仿真预测, 获得的仿真结果可以用于指导制定调度方案。仿真事件数据库子系统。仿真时钟每推进一次, 就产生一次生产线状态数据。图6-7数据库子系统的框架和数据流向......
2023-06-20

图6.27 无刷直流电动机调速系统仿真模型无刷直流电动机仿真使用永磁同步电机模块,在模块对话框中Flux distribution栏下选择Trapezoidal(梯形波)。图6.29c所示是无刷直流电动机一相绕组感应电动势,感应电动势是底宽为180°的梯形波,因此每相的磁通也是梯形波,以此特征,无刷直流电动机也称梯形波永磁同步电动机。表6.2 无刷直流电动机调速系统模块参数图6.29 无刷直流电动机系统仿真结果......
2023-06-19

图2.3 晶闸管三相整流器可逆电路环流晶闸管直流可逆调速系统的主电路由两台变流器反并联组成,当两台变流器工作时,在它们之间会产生环流。当VR组工作在整流状态时,LP3和LP4同时流过直流电流IdF和脉动环流ip,电抗器饱和,由LP1、LP2限制环流。图2.4 三相桥反并联变流器脉动环流......
2023-06-19

西方哲学可谓学派林立,理论观点丰富多样,交替更迭。表3.1给出了西方哲学不同学派的总结简表。下文将逐一简单论述模型验证问题中的科学哲学问题。表3.1 科学哲学的不同学派简表①笛卡尔,法国著名哲学家、数学家。③马赫,奥地利著名物理学家、哲学家。④波普尔,奥地利当代著名哲学家,创立了批判理性主义哲学。......
2023-08-15

相关推荐