图2.3 晶闸管三相整流器可逆电路环流晶闸管直流可逆调速系统的主电路由两台变流器反并联组成,当两台变流器工作时,在它们之间会产生环流。当VR组工作在整流状态时,LP3和LP4同时流过直流电流IdF和脉动环流ip,电抗器饱和,由LP1、LP2限制环流。图2.4 三相桥反并联变流器脉动环流......
2023-06-19
1.逻辑无环流可逆调速系统的组成
逻辑无环流可逆调速系统的组成如图2.9所示,晶闸管组成的正组变流器VF和反组变流器VR反并联组成电动机可逆主电路。电路中,电感L的作用是减小电流脉动,并减小电流的断续区,改善系统的机械特性。测速发动机TG用于检测转速,在电动机转向改变时转速反馈信号Un的极性随之改变。系统通过电流互感器TA和不控整流器检测交流侧电流,从而间接检测电动机电枢电流,得到电流反馈信号Ui。因为逻辑无环流系统的两组变流器不同时导通,检测的电流信号Ui只反映其中一组变流器的电流情况,又因为交流侧检测的电流信号Ui不能反映电流的方向,所以系统使用了两个电流调节器分别控制两组变流器。
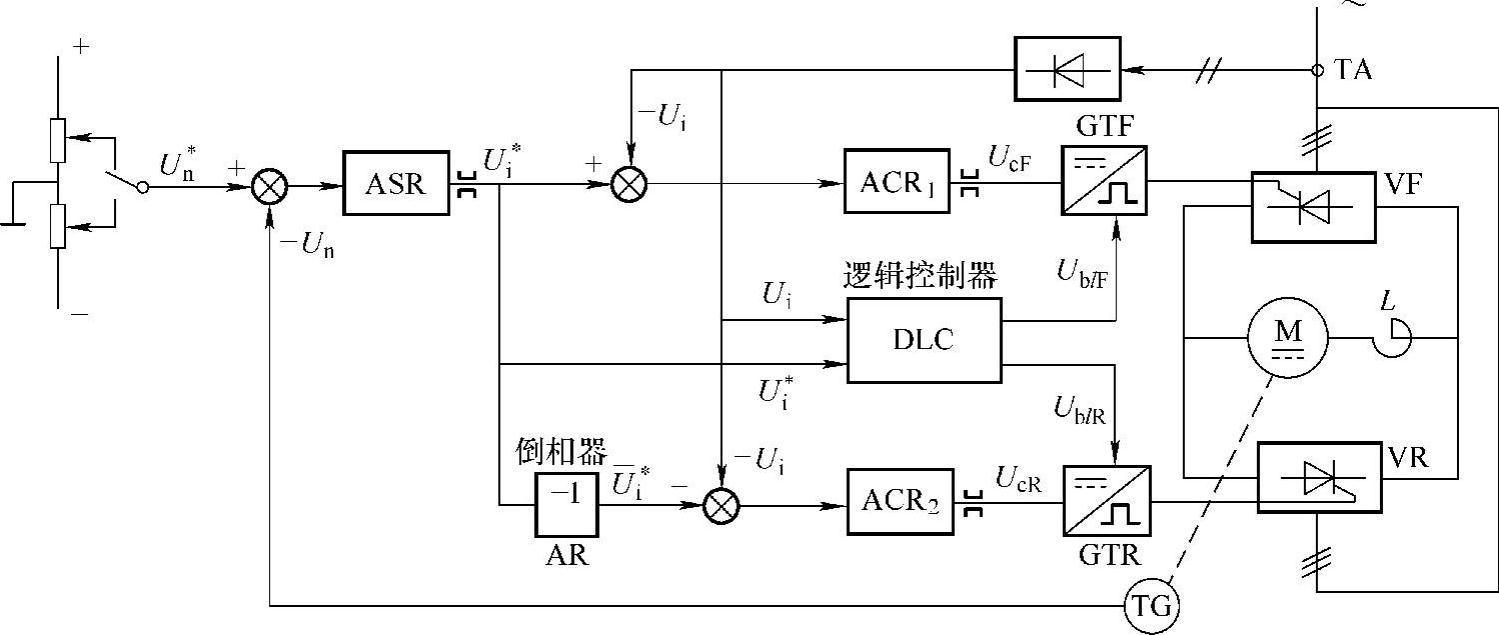
图2.9 逻辑无环流可逆调速系统的组成
系统的控制主要由转速闭环和电流闭环组成,包含了一个转速调节器(ASR),两个电流调节器(ACR1和ACR2)。ACR1用于电枢正向电流的调节,ACR2用于电枢反向电流的调节,ASR和ACR均采用带输出限幅的PI调节器。ASR的输出Ui∗为电流的给定信号(也是转矩信号),ACR1和触发器GTF组成正组变流器VF的控制通道;倒相器AR、ACR2和触发器GTR组成反组变流器VR的控制通道,由于AR的倒相作用,ACR2输入信号Ui∗与ACR1输入信号Ui∗的极性总是相反,因此两个电流调节器的输出UcF和UcR极性也相反,使两台变流器的工作状态(整流或逆变)总是相反。一般两个触发器GTF和GTR的零位都整定在90°,即UcF=UcR=0时,正组和反组的控制角都为90°。两路移相信号UcF和UcR的极性相反,使两个触发器输出的控制角,在⊕UcF=㊀UcR时,αF=βR;在㊀UcF=⊕UcR时,βF=αR,这统称为α=β控制。
在逻辑无环流系统中,任何时候两台变流器只有一台工作(开放),另一台不工作(封锁),这由逻辑控制器实现。
2.逻辑控制器
逻辑控制器(DLC),如图2.10所示,有两路输入信号(Ui∗、Ui)和两路输出信号(UblF、UblR)。两路输出信号中,UblF控制正组触发器GTF的脉冲输出,UblR控制反组触发器GTR的脉冲输出。在UblF或UblR为“1”时,相应的触发器输出脉冲,变流器有触发脉冲而开放;在UblF或UblR为“0”时,相应的变流器触发脉冲被封锁,变流器不会导通。至于开放的变流器是工作于整流还是逆变状态,取决于该控制通道中ACR输出的移相控制信号Uc。UblF和UblR的状态必须是互反的,任何时候只能是一个为“1”,一个为“0”,以保证两台变流器中总有一台被封锁,以阻断变流器之间的环流通路,使之不会产生环流。

图2.10 逻辑控制器
无论电动机制动或改变转向都需要电动机转矩改变方向,即电枢电流改变方向,但是转速给定信号Un∗的极性变化(“+”或“-”)仅反映了转向改变的要求,不能反映减速和制动对转矩方向改变的要求,只有ASR的输出信号Ui∗的极性在减速、制动和转向改变时都发生变化,因此Ui∗极性变化是DLC输出状态切换的条件之一。从表2.1可见,变流器状态的切换必须在本桥逆变结束,电枢电流下降为0之后,如果本桥逆变没有结束,电流还没有下降到0,电流反馈信号Ui=0,就改变DLC的输出,切换两组变流器的工作状态,就会发生本桥逆变失败的故障。因此综上所述,DLC逻辑切换的条件可归纳为:①Ui∗的极性改变——逻辑切换的必要条件;②Ui=0——逻辑切换的充分条件。只有当这两个条件都满足后,DLC的输出状态才能改变,两组变流器的工作状态(开放和封锁)才能相互切换。
根据变流器状态和可靠切换的要求,DLC的组成包括电平检测、逻辑判断、延时控制和连锁保护四部分(见图2.10),其各部分功能如下:
1)电平检测。检测Ui∗极性和Ui的零电流信号。当Ui∗极性为“+”时,输出转矩极性信号UT=1,当Ui∗极性为“-”时,输出转矩极性信号UT=0。当有电流Ui≠0时,使零电流信号Ui0=0,当电流下降到0时(Ui=0),使零电流信号Ui0=1。
2)逻辑切换。根据逻辑切换条件,在转矩信号UT极性(0或1)发生变化,且零电流信号Ui0=1后发出变流器工作状态切换信号,若封锁正组变流器,开放反组变流器,则UF=0、UR=1,若封锁反组,开放正组,则UR=0、UF=1。
3)延时控制。因为零电流检测有一定的精度,尤其在电流很小时电枢电流会出现断续现象,所以虽然检测到零电流,但其实际电流还没有真正为0,电感能量还没有完全释放,本组变流器还在逆变中,这时封锁本组变流器会发生逆变颠覆现象,因此逻辑判断还要经过一定延时再发出封锁信号,以确保电流下降到0后,再封锁本组逆变器。这段延时称为“封锁延时”。封锁延时的时间一般为电流脉动的0.5~1周期,对于三相桥式变流器约为2~3ms。
被封锁的变流器,其晶闸管PN结形成阻挡层、恢复阻断能力需要一定的时间,如果过早地开放反组变流器,则反组输出的电压可能使正在关断过程中的晶闸管误导通,发生两组变流器同时导通的故障。因此,在一组变流器封锁后,还需要经过一定延时才能开放另一组,以确保被封锁组晶闸管可靠关断。这段延时称为“开放延时”。对于三相桥式变流器,开放延时常取5~7ms。
4)连锁保护。连锁保护是确保逻辑控制器输出信号UblF和UblR互反的安全措施,尽管逻辑判断输出的信号UF和UR是互反的(0和1),为防止意外仍需要加连锁保护,一旦出现UF和UR同时为“1”的情况,使逻辑控制器输出信号UblF和UblR都为“0”,即同时封锁两组变流器的触发,并发出报警信号。正常时:
UblF=1,正组变流器开放;UblR=0,反组变流器封锁;
UblF=0,正组变流器封锁;UblR=1,反组变流器开放。
在数字化调速系统中,调节器和逻辑控制器已都由软件来实现。
3.逻辑无环流直流可逆系统的工作过程
(1)正转起动和运行在系统起动前,Ui∗=0、Ui=0,逻辑控制器UblF和UblR输出都为“0”,两组变流器都封锁。发出正转信号后Un∗极性为⊕,ASR输出Ui∗极性变⊕,在没有产生电流前Ui=0,DLC输出UblF=1、UblR=0,正组变流器开放,反组封锁。正组变流器控制通道ACR1和GTF输出极性都为⊕,正组变流器VF工作在整流状态。反组控制通道因为倒相器AR的作用,Ui∗极性为㊀,但UblR=0,反组变流器VR被封锁。电动机正转起动和运行时系统各单元的输出极性和工作状态如图2.11所示,图中没有考虑使用模拟调节器时的倒相作用。
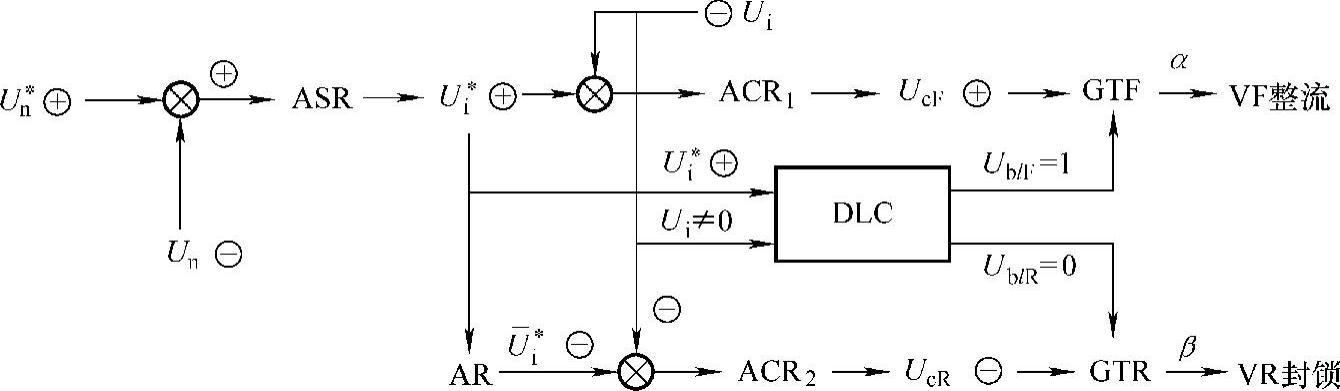
图2.11 正转起动和运行时系统各单元的输出极性和工作状态
(2)正转制动
1)本组逆变阶段。如果调节转速给定Un∗下降为0(制动情况),则因为实际转速还没有变化,Un极性仍为㊀,ASR输出Ui∗极性变㊀,使正向控制通道GTF输出控制角从α推到β,正组变流器从整流变为逆变,电枢电流开始下降(本桥逆变)。这时尽管Ui∗极性已变㊀,但电流还没有到0,Ui≠0,DLC输出状态不变,反组变流器VR仍在封锁中。该阶段系统各单元的输出极性和工作状态如图2.12所示(与图2.11所示状态有变化的信号已用灰色标出)。
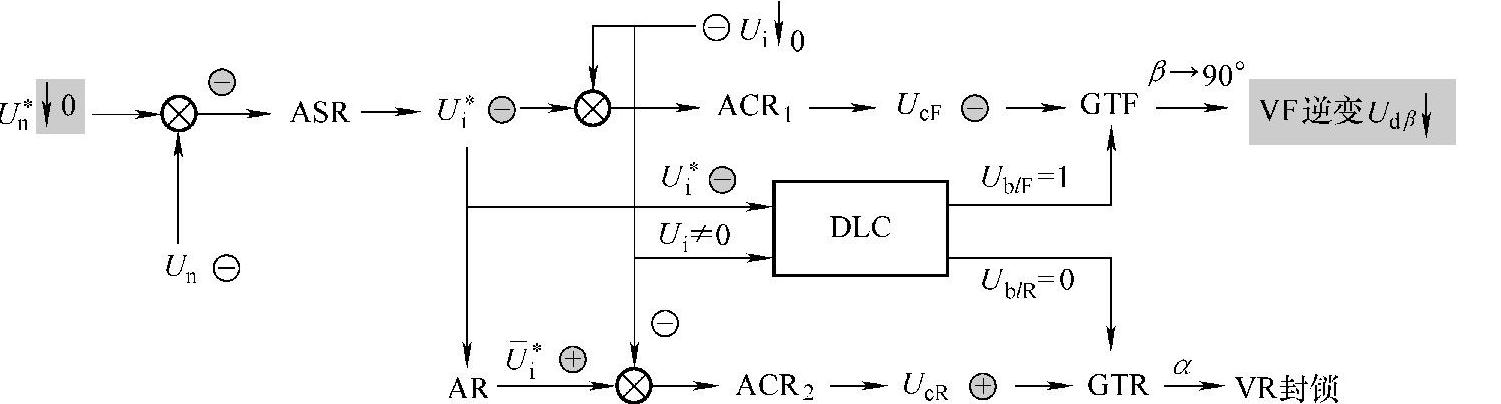
图2.12 本组逆变阶段各单元的输出极性和工作状态
2)他组建流阶段。在本组逆变中,随着电感能量的释放电流下降到0,Ui=0,DLC输出切换的条件已经满足,经过DLC的切换控制和关断延时,UblF从1→0,VF封锁,再经过开放延时后UblR=1,反组变流器VR开通,进入工作状态,因为从发出制动指令后Ui∗已为⊕,GTR输出脉冲控制角为α,因此VR开通就进入整流状态,输出电压Udα与电动机反电动势E同方向,电枢电流反向并迅速上升(反向建流),电动机进入反接制动阶段,转速下降。该阶段系统各单元输出变化如图2.13所示。
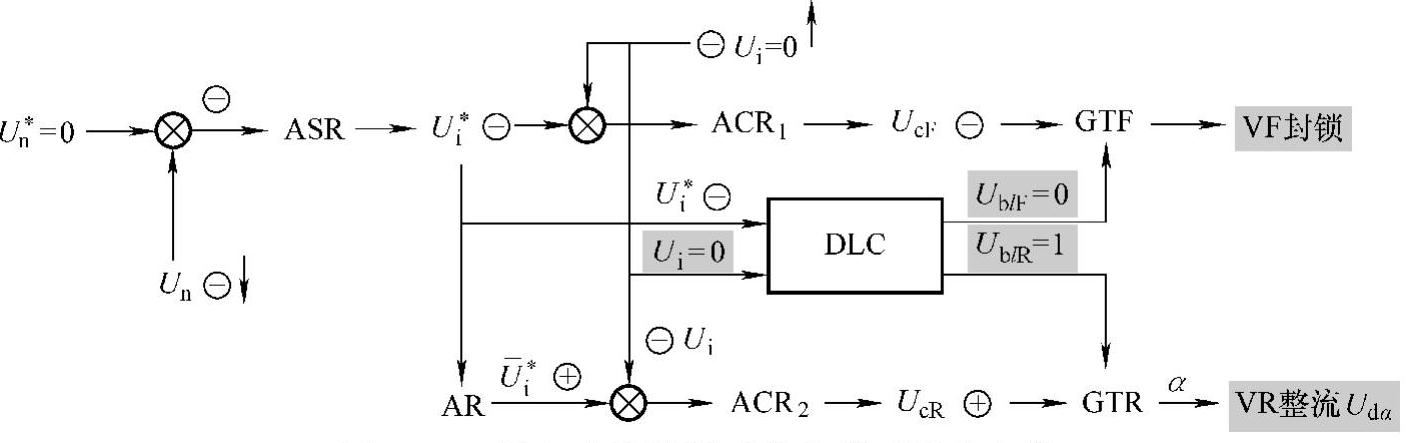
图2.13 他组建流阶段系统各单元输出变化
3)回馈制动阶段。在反组建流阶段,因为电动机是反接制动,电流上升很快并出现超调,Ui>U∗im,使ACR2的输入偏差变“-”,输出UcR变“-”,将变流器VR的控制角从α推到β,DLC状态没有变化,变流器VR仍开通,输出电压反向,VR进入逆变状态,电动机也进入回馈制动,在转速下降中电动机动能转化为电能经VR回输电网。回馈制动阶段是电动机制动的主要阶段,该阶段系统各单元输出变化如图2.14所示。随着转速的下降Un↓并趋近Un∗=0,ASR输出的Ui∗↓,AR输出的Ui∗也下降,GTR输出控制角β→90°,使VR输出的逆变电压Udβ随转速下降而减小,在回馈制动中保持逆变电流为最大,实现了电动机的快速制动。
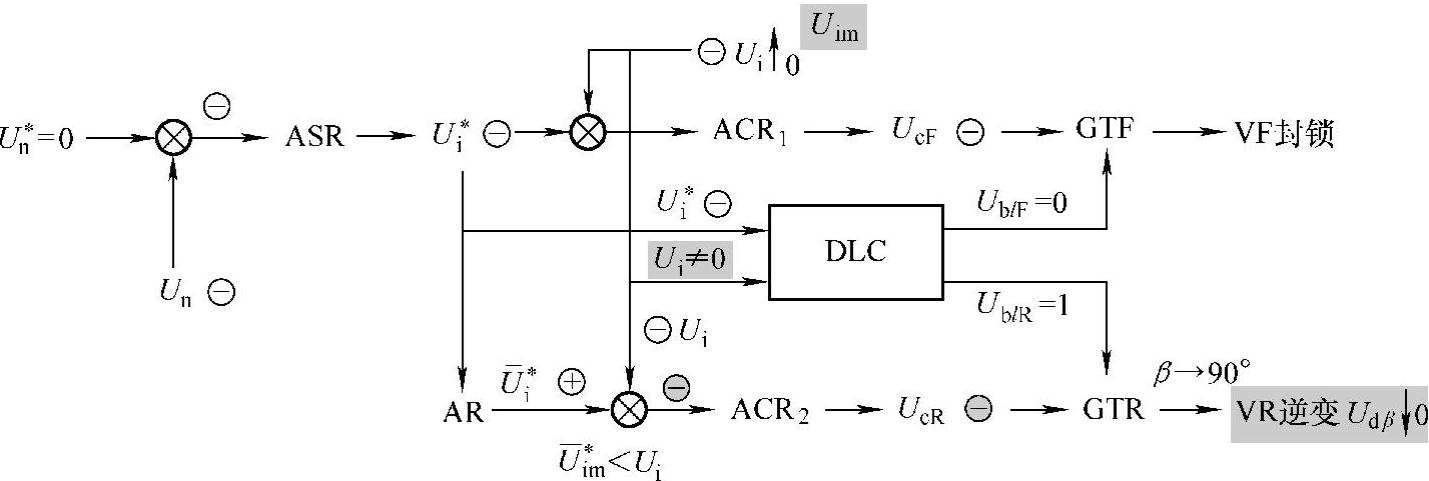
图2.14 回馈制动阶段系统各单元输出变化
以上是电动机正转制动情况,正转制动结束后如果给出反转信号,电动机将开始反转过程,如果在正转时直接将Un∗↓变到“-”值,即要求电动机反转,则其制动过程与上述相同,不同的是制动的末期,电流没有下降的过程,电动机维持最大反向电流直接开始反向起动(见图2.8)。
有关电机运动控制系统的文章

图2.3 晶闸管三相整流器可逆电路环流晶闸管直流可逆调速系统的主电路由两台变流器反并联组成,当两台变流器工作时,在它们之间会产生环流。当VR组工作在整流状态时,LP3和LP4同时流过直流电流IdF和脉动环流ip,电抗器饱和,由LP1、LP2限制环流。图2.4 三相桥反并联变流器脉动环流......
2023-06-19

图2.15 晶闸管逻辑无环流可逆直流调速系统仿真模型2.逻辑控制模块逻辑控制模块DCL是逻辑无环流控制的关键模块,用MATLAB功能模块组成的逻辑控制器仿真模型如图2.16所示,模块的功能参见图2.10。图2.17 延时模块延时0.002s表2.2 逻辑控制器模型的模块提取路径3.模型仿真模型电源、晶闸管整流器、电动机、转速调节器、电流调节器等参数同例1.2,逻辑控制器延时取0.002s,仿真算法为ode23tb。图2.18 可逆调速波形图2.19 逻辑控制器输出波形......
2023-06-19

直流PWM双闭环可逆调速系统仿真模型如图2.22所示,模型中电动机和调节器模块与晶闸管可逆系统相同,直流斩波器使用Universal Bridge模块,模块设置为二桥臂,如图2.23所示。图2.25 直流PWM双闭环可逆调速系统波形图2.26 无电压限制时电容电压图2.27 电阻R电流......
2023-06-19

本桥逆变阶段电枢回路的电压方程为式中,Udβ为逆变状态变流器输出电压;E为电动机反电动势;Id为电枢电流。该阶段电流图2.6 反组桥建流阶段图2.7 回馈制动阶段在回馈制动中随着转速下降,反电动势E下降,在E下降的同时,应使Udβ同步下降,以保持最大电流Idm制动,使制动速度最快。到制动末期转速已经很低,即使β→90°、Udβ→0,反电动势E也不能再维持最大电流,Id将减小直到0,随之转速也下降到0,制动过程结束。......
2023-06-19
例如图2.1所示的升降机可逆调速系统,电动机由一台电力电子变流器供电,采用转速和电流双闭环控制。直流可逆调速系统主电路如图2.2所示。其中,图2.2a所示为两台晶闸管变流器反并联的可逆电路,图2.2b所示为H形PWM变流器的可逆电路。......
2023-06-19

在稳定状态时电动机电流是脉动的,但是因为PWM斩波器调制频率很高,所以这种波动实际很小,而且依靠电枢电感La电流就能连续。图2.21 PWM可逆系统电流波形当Un为0时,ASR和ACR输出都为0,PWM调制器输出驱动脉冲G1、G3宽度与G2、G4脉冲宽度相等,电动机平均电流为0,电动机不转。但是实际电流是脉动的,脉动电流使电动机产生微振,这种微振可以减小电动机在正、反转起动时的静摩擦力,提高起动的快速性。......
2023-06-19

比较晶闸管可逆系统,PWM可逆系统控制较为简单。两者制动过程都有电感续流和回馈制动阶段,不同的是PWM可逆系统在一个调制周期里VT1、VT3和VT2、VT4交替导通,电流有上升和下降(续流)的波动。PWM调速系统采用不控整流器,回馈制动时电能只能在电容中存储或在泵升电压限制电路的电阻R3上消耗,属于能耗制动,这是其不足,因此PWM可逆系统主要应用在中小功率调速场合。......
2023-06-19

由于无换向器电动机本质与普通直流电动机相同,因此其调速系统可以和直流电动机调速系统一样采取转速电流双闭环控制。无换向器电动机调速系统如图6.18所示。无换向器电动机控制一般采用晶闸管器件,成本较低,频率与转速同步,没有失步问题,适用于高电压、大电流、大容量同步电动机调速系统。......
2023-06-19
相关推荐