表1.13 双闭环控制直流调速系统电流调节器参数和滤波器参数3.仿真与分析设置双闭环控制直流调速系统模型参数后,再设置仿真参数,仿真算法取ode15s,仿真时间预定为3s,启动仿真得到的转速和电枢电流波形如图1.56所示。......
2025-09-29
电动机的正转和反转都可以归结于电动机的转矩控制,改变电动机电磁转矩的大小和方向即可控制电动机的转速和转向,有以下两种情况:
1)电动机正转和反转时电动机负载的转矩方向不变。例如升降机,无论上升或下降运动,重物产生的转矩方向都不变,如果电动机产生的电磁转矩大于负载转矩,升降机作上升运动,如果电动机产生的电磁转矩小于负载转矩,升降机作下降运动。
2)负载转矩方向随转向而改变,大多数生产机械都有这个特点,如龙门刨床刨台的运动和可逆轧机等。
改变电动机励磁方向或电枢电流方向都可以改变电动机转矩的方向,现代电动机调速系统都是通过电力电子变流器向电动机供电的,而电力电子器件的单向导电性使变流器只能输出单方向电流,这为电动机电枢电流或励磁电流改变方向带来了复杂性,因此,如何改变电流方向是可逆系统要解决的重要问题,也是学习时要注意的问题。
1.负载转矩方向不变时的可逆调速系统
负载转矩方向不变(位能负载)时的可逆调速,调节电枢电流的大小可以改变电动机的转矩而控制转向,这时电流的方向不变,因此用一台变流器就可以进行电动机的转向控制。例如图2.1所示的升降机可逆调速系统,电动机由一台电力电子变流器供电,采用转速和电流双闭环控制。
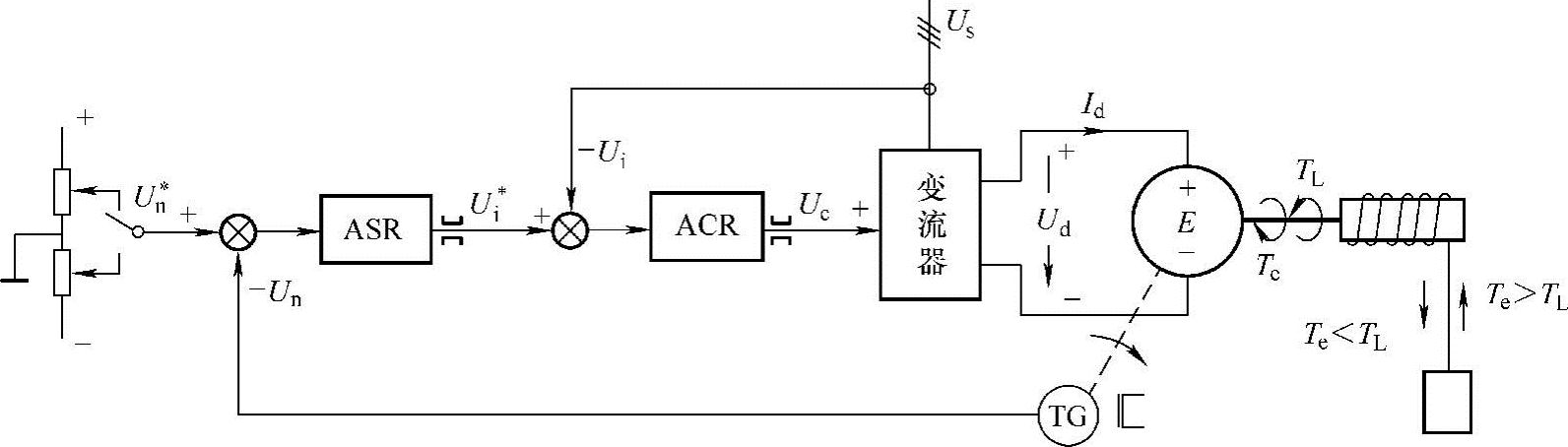
图2.1 升降机可逆调速系统(https://www.chuimin.cn)
(1)升降机上升阶段 当转速给定Un∗为“+”时,发出提升指令,转速调节器(ASR)输出为“+”,电流调节器(ACR)输出为“+”,变流器工作于整流状态,电动机工作在电动状态,电动机电枢电流 ,当电动机转矩大于重物的负载转矩时(Te≥TL),提升重物,转速闭环使重物以给定速度上升。如果重物在空中转速给定调节为“0”,由于ASR的积分作用,输出Ui∗保持着一定值,使变流器输出电流与负载平衡,重物可悬停在空中(n=0)。若重物有下降趋势使电动机转向改变,将引起转速反馈信号Un极性从“-”变“+”,但ASR输出Ui∗和ACR输出Uc的极性仍为“+”,变流器仍工作于整流状态,这时输出电压、电流增加,转矩增加,保持重物在空中悬停。为了保证重物在空中的可靠悬停,升降机一般还用电磁抱闸确保重物不会下坠。
,当电动机转矩大于重物的负载转矩时(Te≥TL),提升重物,转速闭环使重物以给定速度上升。如果重物在空中转速给定调节为“0”,由于ASR的积分作用,输出Ui∗保持着一定值,使变流器输出电流与负载平衡,重物可悬停在空中(n=0)。若重物有下降趋势使电动机转向改变,将引起转速反馈信号Un极性从“-”变“+”,但ASR输出Ui∗和ACR输出Uc的极性仍为“+”,变流器仍工作于整流状态,这时输出电压、电流增加,转矩增加,保持重物在空中悬停。为了保证重物在空中的可靠悬停,升降机一般还用电磁抱闸确保重物不会下坠。
(2)升降机下降阶段 若转速给定Un∗变“-”,发出下降指令,ASR输出和ACR输出变”-”,变流器输出电压Ud由“+”变“-”,电压的下降使电流减小,当电动机电磁转矩小于负载转矩(Te<TL)时,电动机在重物作用下开始反转,重物下降。电动机反转使电动势E的方向改变,在E>Ud时电枢电流 ,但电流的方向仍不变,电流从Ud的“+”极端流入变流器,变流器工作于逆变状态,电动机工作于回馈发电状态,将重物的位能转变为电能回输给电源Us。控制变流器输出电压Ud可以控制电枢电流和电磁转矩,从而控制重物的下降速度。
,但电流的方向仍不变,电流从Ud的“+”极端流入变流器,变流器工作于逆变状态,电动机工作于回馈发电状态,将重物的位能转变为电能回输给电源Us。控制变流器输出电压Ud可以控制电枢电流和电磁转矩,从而控制重物的下降速度。
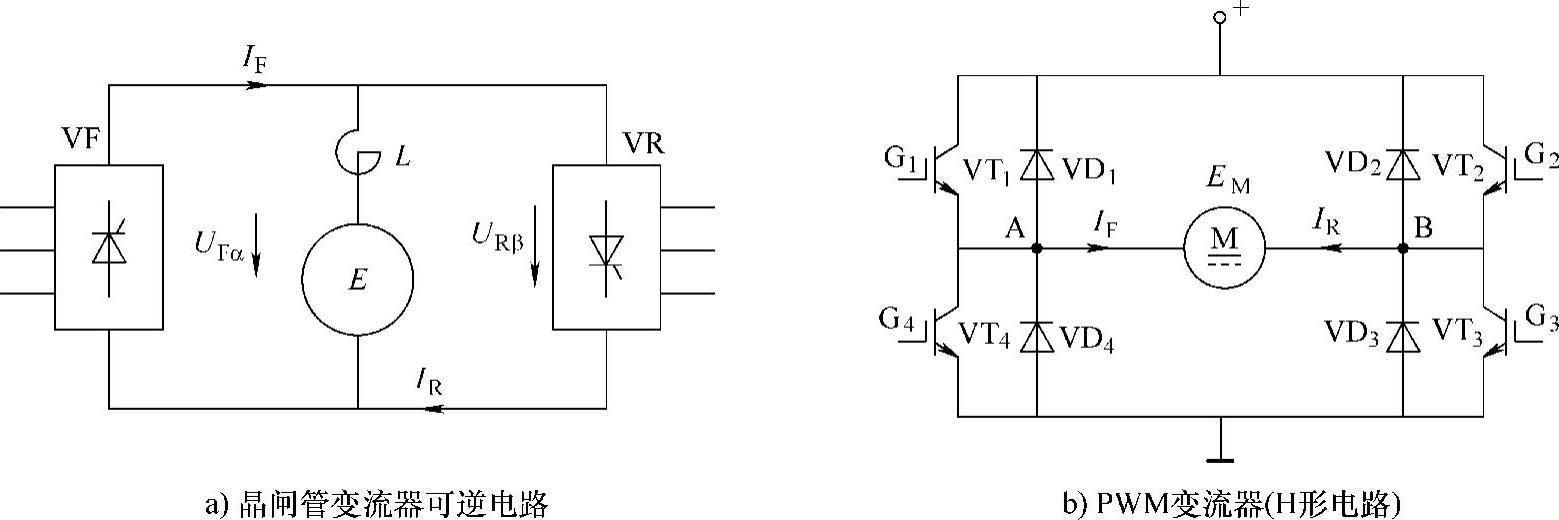
图2.2 直流可逆调速系统主电路
2.负载转矩随转向改变时的可逆调速
除位能性负载外,一般电动机的负载转矩方向都随电动机转向而改变。改变电动机转向首先要使电动机产生的电磁转矩改变方向,由Te=KmΦI可知,控制电动机的励磁或电枢电流的方向都可以控制转矩的方向。一般情况下,直流电动机励磁回路的时间常数比较大,励磁调节的时间比较长,这将影响系统调节的快速性,而且在励磁改变方向时还有失磁的问题。而电枢回路的时间常数比较小,电枢电流的响应速度快,因此在可逆系统中采用电枢电流方向可逆的方案较多。下面主要介绍电枢可逆的方案。
改变电枢电流方向可使电动机改变转向,但一般电力电子变流器只能提供单一方向的电流,改变电枢电流方向就必须有两台变流器,正转时由一台变流器为电动机提供正向电流IF,反转时由另一台变流器向电动机提供反向电流IR,两台变流器作并联连接。直流可逆调速系统主电路如图2.2所示。其中,图2.2a所示为两台晶闸管变流器反并联的可逆电路,图2.2b所示为H形PWM变流器的可逆电路。H形变流器可逆电路实际上也是两个单向PWM斩波电路的反并联,在VT1和VT3导通时,电动机流过正向电流IF,电动机正转;在VT2和VT4导通时,电动机流过反向电流IR,电动机反转。
相关文章

表1.13 双闭环控制直流调速系统电流调节器参数和滤波器参数3.仿真与分析设置双闭环控制直流调速系统模型参数后,再设置仿真参数,仿真算法取ode15s,仿真时间预定为3s,启动仿真得到的转速和电枢电流波形如图1.56所示。......
2025-09-29

图1.35 转速电流闭环控制系统静特性3.转速和电流反馈系数的整定双闭环调速系统转速和电流反馈系数是系统调试时必须要整定的两个参数。......
2025-09-29

图1.33反映了双闭环控制后转速和电流在起动时的响应过程。转速电流双闭环控制系统的抗扰能力与转速单闭环控制系统的不同之处是,由于增加了电流控制环,对于被电流环包围的前向通道上的扰动,电流环有直接抑制的作用,而不必待这些扰动引起转速变化后,才由转速环对之产生抑制,因此双闭环控制系统较转速单闭环控制系统有更强的抗扰能力。......
2025-09-29

前面介绍了转速反馈控制直流调速系统的原理,实际调速系统控制器的组成是随电子技术的不断发展而更新的。图1.26所示是由运算放大器组成的转速调节器控制的转速负反馈直流调速系统。表1.4 运算放大器组成的调节器参数2.电流截止负反馈环节调速系统引入转速负反馈控制后,转速偏差被减小或消除,系统的调速性能和调速范围有很大的提高,但是还存在起动和堵转时的过电流问题,影响电动机正常工作。转速调节器采用比例调节器。......
2025-09-29

图1.10 调压调速静特性调速范围与静差率的关系 生产机械一般不仅要求转速能在一定范围内调节,并且要求负载等变化对转速的影响小,以保证生产过程的稳定性,提高产品质量。也就是说,要求在一定调速范围内,尽管负载变化,但静差率都小于规定指标。调速系统主要的抗扰性能指标有动态降落ΔCmax和恢复时间tv等,如图1.11b所示。......
2025-09-29

双闭环控制直流调速系统的调节器设计,一般都遵循先内环、后外环的原则,即先设计好电流环,然后设计转速环。图1.39 转速电流双闭环控制直流调速系统动态结构图1.电流调节器设计电流环的简化 电流环结构图如图1.40a所示。以上双闭环控制直流调速系统工程设计方法,主要是从系统的跟随性能出发,没有讨论系统的抗扰性能。产生这个问题的原因是表1.7的超调量都是按调节器在线性状态计算的,而实际系统调节器输出有限幅。......
2025-09-29
因此,采用比例调节器的系统是稳态转速有静差调速系统,静差是指稳态有偏差的系统。因此,转速反馈系数变化是系统不能克服的扰动,系统长期运行,振动和老化都可能引起测速发动机励磁或转速反馈电位器分压比的变化,使转速反馈系数发生变化,影响系统控制的精度。......
2025-09-29

有静差调速系统由调节器、变流器、电动机和测速等环节组成,以传递函数表示各环节即组成系统的动态结构图,也称数学模型。由式,K=KPKsα/Ce,其中Ks、Ce在选定变流器和电动机后已经确定,α在选定给定Un和额定转速后也已经确定,对于有静差调速系统,唯一可调的只是放大器放大倍数KP,KP=KCe/αKs。......
2025-09-29
相关推荐