前面介绍了转速反馈控制直流调速系统的原理,实际调速系统控制器的组成是随电子技术的不断发展而更新的。图1.26所示是由运算放大器组成的转速调节器控制的转速负反馈直流调速系统。表1.4 运算放大器组成的调节器参数2.电流截止负反馈环节调速系统引入转速负反馈控制后,转速偏差被减小或消除,系统的调速性能和调速范围有很大的提高,但是还存在起动和堵转时的过电流问题,影响电动机正常工作。转速调节器采用比例调节器。......
2025-09-29
1.系统稳态结构图和主要参数
转速电流双闭环控制直流调速系统稳态结构图如图1.34所示。因为转速和电流调节器都使用PI调节器,在稳态时转速偏差和电流偏差均为0,因此可以得到系统稳态时各主要参数之间关系为
ΔUn=0,Un=Un∗=αn=αn0 (1.53)
ΔUi=0,Ui=Ui∗=βId=βIdL (1.54)
由Ud=KsUc,及Ud=RΣId+Cen得

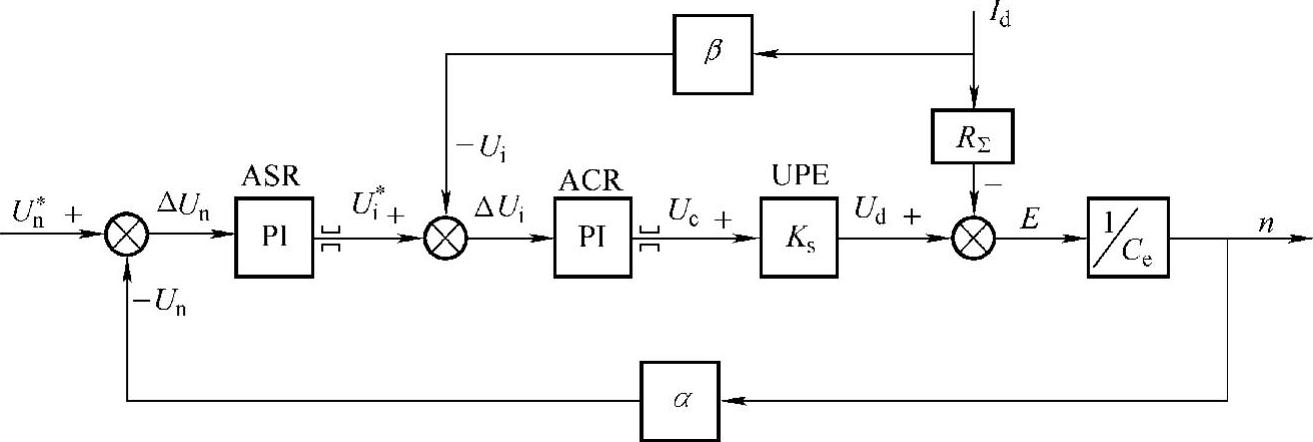
图1.34 转速电流双闭环控制直流调速系统稳态结构图(https://www.chuimin.cn)
2.系统静特性
采用PI调节器的双闭环调速系统,在允许的负载电流范围内(0<Id<Idm),电动机的稳态转速是不变的。改变转速给定Un∗时,系统的理想空载转速(n01、n02、n03)改变,调节Un∗可以调节转速,并且在额定范围内稳态转速不随负载变化而变化,系统的转速降Δn=0,因此系统的静特性是一族水平直线(见图1.35中的AB段)。
如果负载增加或堵转使电流超过允许的最大值Idmax,则因为电流环控制了电流Id,使其不能大于Idmax,也就是使电动机提供的转矩小于负载转矩,电动机将带不动负载,转速将迅速下降直到0(特性BC段)。此时,BC段的下垂特性起着电动机过载和堵转时的过电流保护作用。
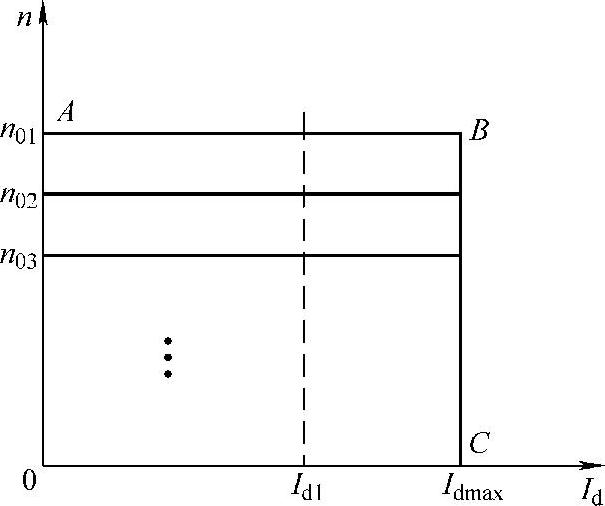
图1.35 转速电流闭环控制系统静特性
3.转速和电流反馈系数的整定
双闭环调速系统转速和电流反馈系数是系统调试时必须要整定的两个参数。一般调节器输出的限幅值(Un∗max和Ui∗max)是系统设计时选定的,最高转速和最大电流在电动机铭牌上有限定,按式(1.52a)和式(1.52b)可以计算转速反馈系数和电流反馈系数。因为稳态无静差,所以转速和电流反馈系数的整定比较简单,其方法是:首先断开转速反馈和电流反馈,将调节器输出限幅值(Un∗max和Ui∗max)调整为设计值,然后在系统开环状态下,调节变流器控制电压Uc,使转速上升到额定值nN,再调节转速反馈电位器RP2,使转速反馈电压UnN=Un∗N,转速反馈调整完毕。电流反馈系数的整定一般不在最大电流下进行,因此首先要计算电流反馈系数, ,然后在一定负载下测量电枢电流Id,调节电流反馈电位器RP3,使电流反馈值Ui=βId,电流反馈系数整定完成。整定后应锁紧电位器,保证转速和电流反馈系数不再改变。
,然后在一定负载下测量电枢电流Id,调节电流反馈电位器RP3,使电流反馈值Ui=βId,电流反馈系数整定完成。整定后应锁紧电位器,保证转速和电流反馈系数不再改变。
相关文章

前面介绍了转速反馈控制直流调速系统的原理,实际调速系统控制器的组成是随电子技术的不断发展而更新的。图1.26所示是由运算放大器组成的转速调节器控制的转速负反馈直流调速系统。表1.4 运算放大器组成的调节器参数2.电流截止负反馈环节调速系统引入转速负反馈控制后,转速偏差被减小或消除,系统的调速性能和调速范围有很大的提高,但是还存在起动和堵转时的过电流问题,影响电动机正常工作。转速调节器采用比例调节器。......
2025-09-29

图1.30所示系统采用比例调节器,是有静差调速系统。电压反馈的极性与转速给定极性相反,因此是电压负反馈,电流反馈极性与给定极性相同,因此是正反馈。图1.31 电压负反馈电流正反馈控制直流调速系统稳态结构图将静特性[见式]与转速负反馈系统[见式]比较可以看出,电压反馈只是将电压环内电阻Rn造成的转速降减小了,而环外电阻Ra造成的转速降仍和开环调速时一样。......
2025-09-29

若k是按系统对稳态误差的要求选取的,则此项自然满足,可免去。需要校验的稳态误差可能包括:1.输入信号引起的误差e1)位置信号x=x0引起的误差eP。3)反馈传感器精度所引起的误差ε3不因k的改变而减少,故必须使反馈传感器有较高的精度。......
2025-09-29

图1.10 调压调速静特性调速范围与静差率的关系 生产机械一般不仅要求转速能在一定范围内调节,并且要求负载等变化对转速的影响小,以保证生产过程的稳定性,提高产品质量。也就是说,要求在一定调速范围内,尽管负载变化,但静差率都小于规定指标。调速系统主要的抗扰性能指标有动态降落ΔCmax和恢复时间tv等,如图1.11b所示。......
2025-09-29
因此,采用比例调节器的系统是稳态转速有静差调速系统,静差是指稳态有偏差的系统。因此,转速反馈系数变化是系统不能克服的扰动,系统长期运行,振动和老化都可能引起测速发动机励磁或转速反馈电位器分压比的变化,使转速反馈系数发生变化,影响系统控制的精度。......
2025-09-29
有静差调速系统由调节器、变流器、电动机和测速等环节组成,以传递函数表示各环节即组成系统的动态结构图,也称数学模型。由式,K=KPKsα/Ce,其中Ks、Ce在选定变流器和电动机后已经确定,α在选定给定Un和额定转速后也已经确定,对于有静差调速系统,唯一可调的只是放大器放大倍数KP,KP=KCe/αKs。......
2025-09-29

式(6.6)就是进油节流调速回路的速度负载特性。图6.6非恒定负载的功率-速度曲线1—液压缸的有功功率;2—负载特性曲线;3—液压泵的功率曲线图6.7出油节流调速③进油节流调速的效率:不考虑液压泵、液压缸和管路的功率损失时,进油节流调速的效率可表示为:2)出油节流调速回路出油节流调速回路如图6.7 所示。由式可见,出油节流调速回路的速度负载特性公式与进油节流调速回路的速度负载特性公式完全一样。......
2025-09-29

由系统的传递函数框图可得EPC系统的开环传递函数为式中 k——开环放大系数,。将算得的ωh、ξh、k代入式,可据此画出EPC系统的开环伯德图。图12-18 改造前后CP机组EPC系统的开环伯德图由图12-18可得系统的性能指标为:①穿越频率:ωc=2.4Hz;②幅值裕量:h=16dB;③相位裕度:γ=75°。可见实测值和理论分析值比较接近,说明上面建立的EPC系统的数学模型和确定的参数是正确的,是可以作为预测改造后系统性能的依据的。......
2025-09-29
相关推荐