表1.13 双闭环控制直流调速系统电流调节器参数和滤波器参数3.仿真与分析设置双闭环控制直流调速系统模型参数后,再设置仿真参数,仿真算法取ode15s,仿真时间预定为3s,启动仿真得到的转速和电枢电流波形如图1.56所示。......
2023-06-19
1.系统的组成
为了使调速系统具有良好的动、静态性能,在转速控制的基础上还需要电流控制。按照反馈控制理论,对某一物理量进行控制需要引入该物理量的负反馈,转速控制需要转速负反馈,电流控制同样需要引入电流的负反馈。为了使转速和电流能相对独立控制,应分别采用两个调节器,转速调节器(ASR)和电流调节器(ACR),并且将电流调节器置于转速调节器之后。因为转速偏差ΔUn反映了对电动机转矩和电流的控制要求,因此转速调节器的输出可以作为电流控制的给定信号U∗i,U∗i与电流反馈信号Ui比较后经电流调节器产生变流器控制信号Uc。如此组成的转速电流双闭环控制直流调速系统(也称串级调节系统)如图1.32所示。
在图1.32所示系统中,转速环包含了转速给定环节U∗n、转速检测和反馈环节Un、转速调节器、电流调节器、变流器(UPE)和电动机M;电流环包含了电流检测和反馈、电流调节器和变流器。因为电流环置在转速环内,常称为内环,而转速环则称为外环。一般转速调节器和电流调节器都采用带输出限幅的PI调节器。采用PI调节器可以使转速和电流在稳态时无静差,在动态时有快速响应能力。调节器的输出限幅是对输出正、负值的限制措施(图中以“ ”表示),转速调节器的输出是电流的给定值Ui∗,因此转速调节器的输出限幅限制了电流给定的最大值±Ui∗max,经过电流环调节可以控制电机的最大电流;电流调节器的输出是变流器的控制信号Uc,Uc的限幅则限制了变流器的输出电压Udmax,调节器的限幅不仅是过电流和过电压的保护措施,并且充分利用了变流器和电动机的最大负荷能力,发挥了变流器和电动机的效能。因为采用了PI调节器,转速和电流在稳态都是无差控制,因此:
”表示),转速调节器的输出是电流的给定值Ui∗,因此转速调节器的输出限幅限制了电流给定的最大值±Ui∗max,经过电流环调节可以控制电机的最大电流;电流调节器的输出是变流器的控制信号Uc,Uc的限幅则限制了变流器的输出电压Udmax,调节器的限幅不仅是过电流和过电压的保护措施,并且充分利用了变流器和电动机的最大负荷能力,发挥了变流器和电动机的效能。因为采用了PI调节器,转速和电流在稳态都是无差控制,因此:
转速反馈值Un=αn,转速反馈系数为
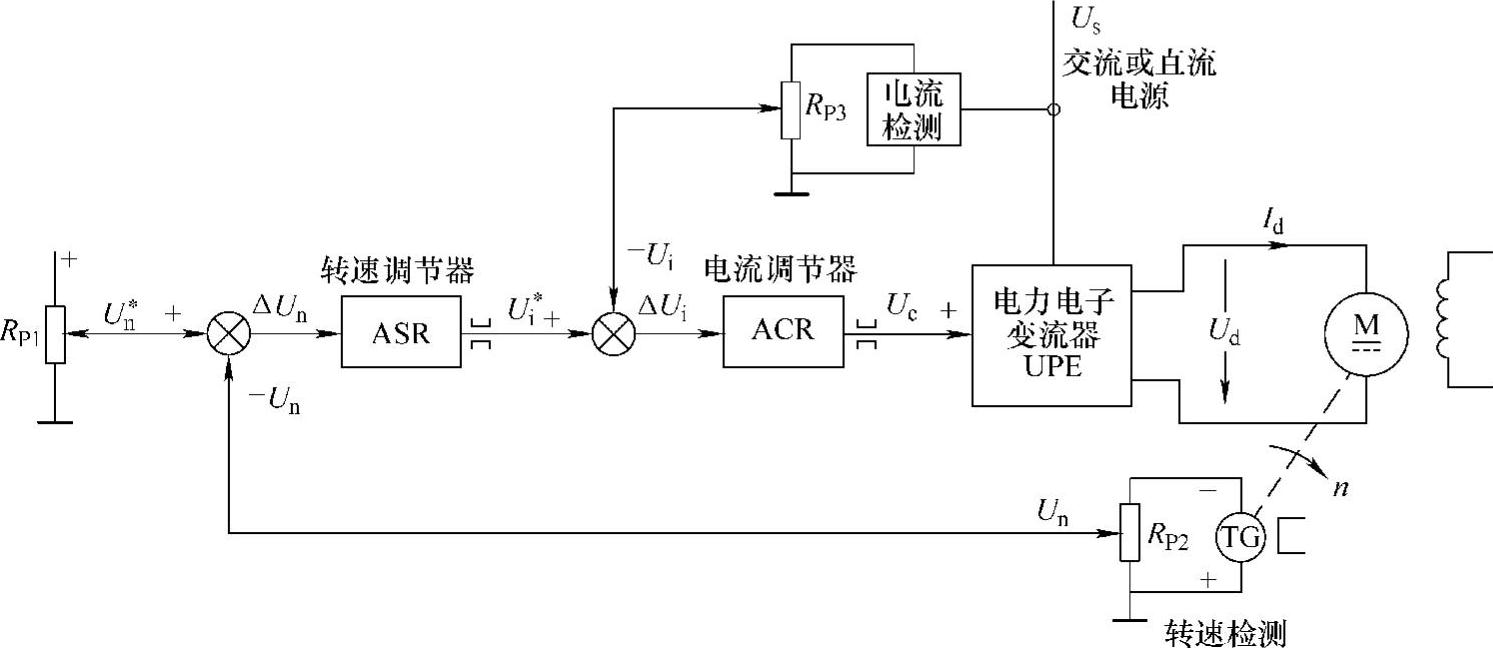
图1.32 转速电流双闭环控制直流调速系统

电流反馈值Ui=βId,电流反馈系数为

2.系统的工作原理
转速电流双闭环控制系统的工作原理可以用系统的起动过程和稳速运行的过程来叙述。
(1)系统的起动过程 转速电流双闭环系统电动机的起动过程可以分为三个阶段(见图1.33),分别是电流的上升阶段(Ⅰ),恒流升速阶段(Ⅱ)和转速的调节阶段(Ⅲ)。
1)第Ⅰ阶段:电流上升阶段(t0~t1)。

图1.33 双闭环控制直流调速系统转速和电流波形
在电机静止时转速给定Un∗和电枢电流Id都为0。突加转速给定Un∗时,因为电动机尚未起动,转速反馈Un=0,转速偏差ΔUn=Un∗,在转速调节器的比例积分作用下,转速调节器输出迅速达到最大的限幅值Ui∗max。在起动阶段电动机转速低,反电动势E很小,只需要很低的电压Ud,电枢电流Id就迅速从0上升,因此该阶段称为电流的上升阶段,也称为建流子阶段。随着电流上升,电磁转矩Te增加,当Te大于空载时的摩擦转矩或带载时的负载转矩时,电动机开始起动,当电流上升到Idmax时,本阶段结束。
2)第Ⅱ阶段:恒流升速阶段(t1~t2)。
在第Ⅰ阶段中随着电流上升,电流反馈值Ui也在迅速上升,当电流超过最大电流Idmax后,因为Ui>Ui∗max,电流偏差ΔUi变“-”,电流调节器输出将从Uc下降,使变流器输出电压Ud下降,电枢电流也有所减小。但是在转速没有达到给定转速n∗前,都有Un<Un∗,转速调节器保持着输出限幅状态,电流给定维持在最大值Ui∗max。因此,若Id<Idmax,则电流偏差ΔUi变“+”,电流调节器的积分作用使输出又增加一些,电流又要上升一些。也就是说,电动机没有达到给定转速前,电流给定都保持着最大值,电流调节器发挥着对电流的调节作用,使电动机保持着最大电流Idmax起动,电动机以允许的最大加速度升速,故这一阶段称为恒流升速阶段,这是电动机起动的主要阶段。在转速没有达到给定转速n∗前,都有Un<Un∗,转速调节器都处在输出限幅状态,电流给定都维持着最大值Ui∗max,这意味着系统将在最大电流和最大转矩下起动,这充分利用了电动机的电流和转矩能力,可以实现起动时间最短的最优控制。
3)第Ⅲ阶段:转速调节阶段(t2~t4)。
在恒流升速阶段电动机转速不断上升,当转速超过给定值时,n>n∗,Un>Un∗,转速偏差ΔUn变“-”,转速调节器输出将从限幅值Ui∗max下降,也称转速调节器退饱和。由于电流给定值减小,通过电流调节器调节,Uc、Ud、Id都从最大值下降(t2~t3),如果Id下降使电磁转矩小于负载转矩,电动机将减速,进入转速的调节阶段。在这个阶段中,只要转速反馈偏离转速给定值(Un≠Un∗),转速调节器都发挥调节作用,使电流给定值Ui∗随之调整,并且通过电流调节器和变流器调节电流,以保持电磁转矩和负载转矩的平衡(Te=TL)。这时,电动机进入保持转速稳定运行的阶段,起动过程结束。
这里需要补充说明的是,第Ⅲ阶段所述转速调节器退饱和与限幅是两个概念。由模拟器件(如运算放大器)组成的积分调节器,输出随积分增加,当输出达到运算放大器极限值时称为调节器饱和;而限幅是由附加的限幅电路完成的,限幅值可以根据需要调节,一般限幅值小于运算放大器饱和值。因此,调节器输入极性改变后先有退饱和,退饱和使运算放大器输出下降,在输出大于限幅电路的限幅值前,调节器输出仍维持限幅值,从运算放大器退饱和到调节器输出限幅值的一段时间称为退饱和时间。在数字调节器中,积分器限幅(相当于饱和)与调节器的限幅一般取值相同,这样可以减少退饱和时间,加速系统的调节过程,这时已无所谓退饱和问题,讲退饱和仅是习惯,实际上是指输出低于限幅值。
从起动过程中可以看到,引入电流调节器后,系统起动有如下特点:
1)在起动第Ⅰ阶段,电流迅速上升,在起动第Ⅱ阶段中,电动机保持以最大电流起动,充分利用了变流器和电动机的最大安全电流快速起动,使起动时间最短。在第Ⅲ阶段中,根据转速调节电流,使电磁转矩与负载转矩平衡,保持转速的稳定。
2)最大电流限制是利用了转速调节器的输出限幅。在第Ⅰ和第Ⅱ阶段,转速没有达到给定值前,转速调节器都保持着输出限幅饱和状态,电流给定维持着最大值,Ui∗不随转速上升而变化,转速环似乎不起作用,相当于转速开环状态。只有转速超过转速给定值,即发生转速超调后,转速调节器才退出限幅状态。
3)因为在起动中电动机反电动势随转速上升而增加,所以电流调节器的输出Uc是逐步增加的,但都小于限幅值(也称不饱和状态),即使在工作时,电流调节器输出Uc一般也小于限幅值。电流调节器输出限幅主要是限制整流器输出过电压,在起动和正常工作时,电流调节器都不应该饱和,才能起电流的调节作用,使电枢电流跟随电流给定值变化,电流环呈现为一个在转速环内的电流随动控制作用。
(2)稳速运行过程 电动机起动后一般要求电动机的转速稳定为给定值n∗,如果转速给定改变,则电动机的转速将随之改变。转速调节器为PI调节器,在转速出现偏差时,调节器的积分作用使调节器输出的电流给定值Ui∗改变,并经过电流调节器、变流器调节电动机的电枢电流,使电动机加速或减速来调整转速。如果电动机负载增加引起电动机转速的下降(如图1.33的t5时),转速下降引起Un↓,ΔUn↑,经转速调节器使Ui∗↑,在电流调节器作用下变流器输出电压Ud提高,Id上升,使电磁转矩有所增加,电动机转速回升,当转速回复到原来值n∗后调节过程结束。系统在运行中可能造成转速变化或波动的因素很多,因此抗扰性能是衡量系统性能的重要指标。
(3)系统减速和制动 转速电流双闭环直流调速系统与转速单闭环系统一样,若电力电子变流器不能提供电枢反向电流(是不可逆直流调速系统),则难于实现快速制动和减速。这时,虽然在电动机制动时将Un∗置0,ΔUn变“-”,转速调节器输出Ui∗下降至0,同时电流调节器输出Uc、变流器输出Ud都为0,电枢电流也下降到0,但是电动机在惯性作用下仍会继续旋转,由摩擦使转速下降,电动机处于自由停车状态,停车所需的时间较长。如要快速停车,则需要在电枢两端并联电阻进行能耗制动或在电动机轴上安装电磁抱闸强制制动。对于电流可逆的主电路,电动机正、反转和制动运行过程将在第2章中介绍。
有关电机运动控制系统的文章

表1.13 双闭环控制直流调速系统电流调节器参数和滤波器参数3.仿真与分析设置双闭环控制直流调速系统模型参数后,再设置仿真参数,仿真算法取ode15s,仿真时间预定为3s,启动仿真得到的转速和电枢电流波形如图1.56所示。......
2023-06-19

为此,在启动(或制动)过渡过程中,希望始终保持电流为允许的最大值,使调速系统以最大的加(减)速度运行。当达到稳态转速时,最好使电流立即降下来,使电磁转矩与负载转矩相平衡,从而迅速转入稳态运行。这是在最大电流(转矩)受限制时调速系统所能获得的最理想的动态过程。为了使转速、电流双闭环调速系统具有良好的动、静态性能,电流、转速两个调节器一般采用PI调节器,且均采用负反馈。......
2023-06-25

图1.33反映了双闭环控制后转速和电流在起动时的响应过程。转速电流双闭环控制系统的抗扰能力与转速单闭环控制系统的不同之处是,由于增加了电流控制环,对于被电流环包围的前向通道上的扰动,电流环有直接抑制的作用,而不必待这些扰动引起转速变化后,才由转速环对之产生抑制,因此双闭环控制系统较转速单闭环控制系统有更强的抗扰能力。......
2023-06-19

图1.35 转速电流闭环控制系统静特性3.转速和电流反馈系数的整定双闭环调速系统转速和电流反馈系数是系统调试时必须要整定的两个参数。......
2023-06-19

作为微机控制的全数字式双闭环直流电动机调速系统,其给定信号的输入是数据指令,通常由上位微型计算机通过串行或并行等通信方式来确定直流调速系统的速度和工作方式。微机控制的双闭环直流电动机调速系统的软件有主程序、初始化子程序和中断服务子程序等。......
2023-06-25
双闭环系统采用PI调节器,则其稳态时输入偏差信号一定为零,即给定信号与反馈信号的差值为零,属于无静差调节,下面分别介绍两个调节器的工作情况。双闭环系统的静特性比带电流截止负反馈的单闭环系统静特性好。可以看出,双闭环直流调速系统的正常工作段静特性如图3-3所示的n0A段。图3-4双闭环直流调速系统稳态结构图......
2023-06-25

双闭环控制直流调速系统的调节器设计,一般都遵循先内环、后外环的原则,即先设计好电流环,然后设计转速环。图1.39 转速电流双闭环控制直流调速系统动态结构图1.电流调节器设计电流环的简化 电流环结构图如图1.40a所示。以上双闭环控制直流调速系统工程设计方法,主要是从系统的跟随性能出发,没有讨论系统的抗扰性能。产生这个问题的原因是表1.7的超调量都是按调节器在线性状态计算的,而实际系统调节器输出有限幅。......
2023-06-19
在设备物理上的允许条件下实现最短时间的控制称作“时间最优控制”,对于调速系统,在电动机允许过载能力限制下的恒流启动,就是时间最优控制。在转速动态过程中,确保获得电动机允许的最大电流,从而加快动态过程。一旦故障消失,系统立即自动恢复正常。......
2023-06-25
相关推荐