用牛顿—莱布尼茨公式计算定积分时,需要求出被积函数的原函数,由于用换元积分法和分部积分法可以求出一些函数的原函数,因此,在一定条件下,可以用换元积分法和分部积分法来计算定积分.下面讨论定积分的这两种计算方法.一、定积分的换元积分法定理5.6 若函数f(x)在区间[a,b]上连续,函数x=φ(t)在区间[α,β]上具有连续的导数,当t在区间[α,β]上变化时,x=φ(t)的值在[a,b]上变化,且φ......
2023-11-22
1.积分(I)调节器
积分调节器(见图1.18a)的输出Uc为输入ΔU的积分

式中,τ为积分时间常数;Uc0为初始值。
积分调节器输入/输出特性如图1.18b所示,当输入ΔU为“+”时(0~t1),输出Uc增加,Uc的上升速率取决于积分时间常数τ和偏差ΔU;当输入ΔU=0时(t1~t2),Uc保持不变;只有当输入ΔU为“-”时(t2~t3),Uc才减小。积分调节器在输入ΔU=0时,能够保持输出值Uc,这与比例调节器不同,比例调节器在ΔU=0时,Uc=0,因此积分调节器的输出保持作用使它可以实现无静差调速。
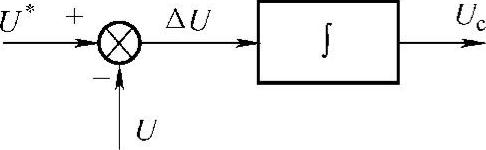
a)积分调节器框图
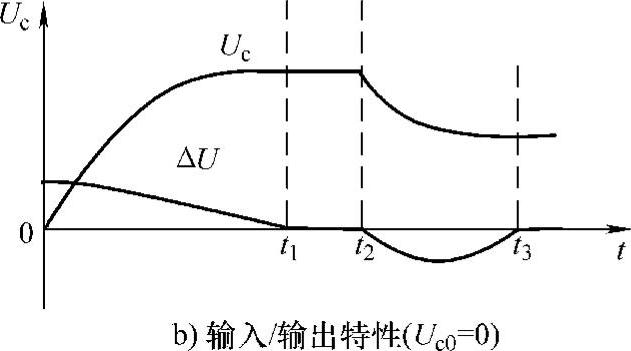
图1.18 积分调节器
积分调节器的传递函数如下式:

2.比例积分(PI)调节器
比例积分调节器是比例调节器和积分调节器的结合。其输出

当输入偏差ΔU如图1.19所示时,PI调节器输出Uc为调节器比例部分曲线UP和积分部分曲线UI的叠加。与积分调节器相比,PI调节器在t=0+时,其Uc不是从0开始,而是有一跳跃,因此PI调节器的比例部分可加快系统的调节过程,积分部分可以最终消除稳态误差。由于这个特点,PI调节器在系统无静差调节中最常使用。

图1.19 比例积分调节器输入/输出特性(Uc0=0)
PI调节器的传递函数为
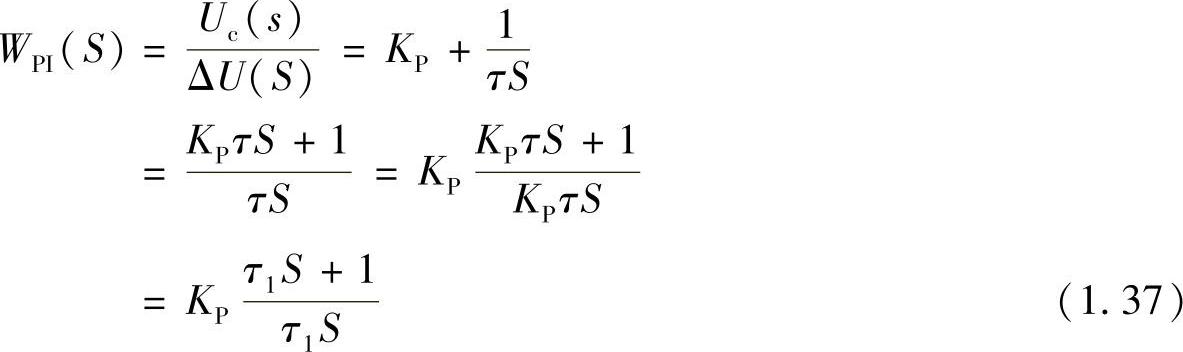
式中,KP为PI调节器的放大倍数;τ为PI调节器的积分时间常数;τ1为PI调节器的超前时间常数,τ1=KPτ。
有关电机运动控制系统的文章

用牛顿—莱布尼茨公式计算定积分时,需要求出被积函数的原函数,由于用换元积分法和分部积分法可以求出一些函数的原函数,因此,在一定条件下,可以用换元积分法和分部积分法来计算定积分.下面讨论定积分的这两种计算方法.一、定积分的换元积分法定理5.6 若函数f(x)在区间[a,b]上连续,函数x=φ(t)在区间[α,β]上具有连续的导数,当t在区间[α,β]上变化时,x=φ(t)的值在[a,b]上变化,且φ......
2023-11-22

为了消除稳态误差,在控制器中必须引入“积分项”。它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。......
2023-08-30

计算的参数:1)电流调节器ACR最常用的电流调节器是PI调节器。具有给定和反馈滤波器的电流调节器如图3-14所示。图3-14电流调节器图3-15电流调节器动态结构图2)电流环动态结构图双闭环直流调速系统中电流调节过程比转速调节过程快得多,因此电流环设计时,可忽略电动机反电动势的影响。......
2023-06-25

以电动水阀或风阀的开度控制为例,如果调节器的输出量表示电动水阀或风阀的开度,比例带δ就代表使电动水阀或风阀开度改变100%,也就是开度从0~100%全开情况下被调量的变化范围。超出这个“比例带δ”之外,电动水阀或风阀将处于全关或全开的状态,调节器的输入与输出之间的比例关系不再保持。当比例调节器的比例带或比例系数选择较为合适时,图中曲线1为衰减振荡过程,这是一个正常的调节过程。......
2023-08-30

定理2 设f(z)在实轴上解析,在上半平面Imz >0除有限个奇点z1,z2,··· ,zn 外解析.若存在正数r,M 和α >1,使当|z| ≥r 且Imz ≥0 时f(z)解析且满足|f(z)|≤M/|z|α,则积分I2 =存在且有证明设CR为上半圆周z = Reiθ(0 ≤θ ≤π),取充分大的R 使R ≥r并且奇点z1,z2,··· ,zn均在由CR及实轴上从-R 到R 的一段所围成的闭路......
2023-10-30
所谓比例式调节器一般是指稳态调节量比例于简单的实际运行参数与它的给定(整定)值之间的偏差值的调节器,有时又称为按偏移调节器。图14-3自动励磁调节系统下面以按电压偏差调节的比例式调节器为例来进行分析。如果不计调节器本身的时间常数,则调节器将是一个比例环节。为此,全式乘以xad/rf得注意到发电机空载电势强制分量的增量ΔEqe=XadΔife,于是得到式中,KU=xadKUR/rf称为调节器的综合放大系数。......
2023-06-15

【主要内容】1.积分中值定理设函数f(x)在[a,b]上连续,则存在ξ∈[a,b],使得注 (ⅰ)当上述的f(x)是单调函数时,中值ξ∈(a,b).(ⅱ)积分中值定理具有以下的推广形式:设函数f(x)在[a,b]上连续,函数g(x)在[a,b]上可积且不变号,则存在ξ∈[a,b],使得2.积分中值定理的应用积分中值定理主要用于把抽象函数f(x)的定积分转换成f(x)在[a,b]上某点η处的值与(b......
2023-10-27

【主要内容】1.不定积分的概念函数f(x)在区间I上的原函数全体F(x)+C(其中,F(x)是f(x)的一个原函数,即F′(x)=f(x),C是任意常数),称为f(x)的不定积分,记为∫f(x)dx.不定积分的计算主要依靠不定积分的基本公式、基本性质及基本运算方法.基本公式(1),(2),(3),(4),(5),(6),(7),(8),(9),特别地,,(10),(11),(12),此外,还有(1......
2023-10-27
相关推荐