图1.10 调压调速静特性调速范围与静差率的关系 生产机械一般不仅要求转速能在一定范围内调节,并且要求负载等变化对转速的影响小,以保证生产过程的稳定性,提高产品质量。也就是说,要求在一定调速范围内,尽管负载变化,但静差率都小于规定指标。调速系统主要的抗扰性能指标有动态降落ΔCmax和恢复时间tv等,如图1.11b所示。......
2025-09-29
1.跟随性能
以起动过程分析有静差调速系统的跟随性能,如图1.15所示。起动前电动机静止,n=0,转速反馈Un=0;在t=0时突加Un∗,ΔUn=Un∗-Un=Un∗,转速调节器输出Uc=KPΔUn,变流器输出Ud=KPKsΔUn,电枢电流Id迅速上升,电动机起动,n↑;起动后随n↑,转速偏差从ΔUn=Un∗下降,使Ud↓,Id↓,电动机转速继续上升,但增速变缓。若转速超过给定转速n∗,ΔUn和Uc变“-”,这时变流器有两种情况:
1)变流器能产生正向和反向的电压及电流(如H形直流斩波器),则-Uc使Ud和Id反向,电动机制动,转速n↓。
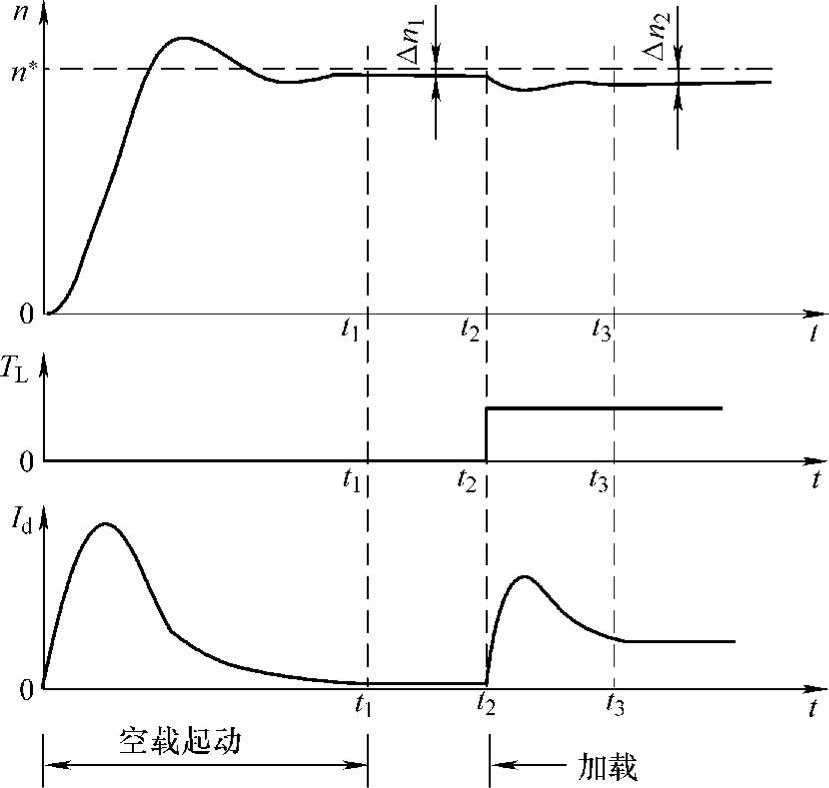
图1.15 有静差调速动态响应
2)变流器不能提供反向电压和电流(如晶闸管整流器),则转速超调时,尽管ΔUn和Uc变“-”,但Ud只能最低为0,电动机在摩擦和负载等阻转矩作用下减速,转速n↓。
当n小于n∗,ΔUn、Uc、Ud和Id又为“+”时,转速n又上升一些,当偏差ΔUn维持的Uc和Ud使电枢电流Id与负载折算的电流IdL平衡时,电动机完成起动过程进入稳定运转状态,如图1.15所示。稳定后的转速是低于给定转速的,因为采用比例调节器的系统Uc、Ud、Id都受偏差ΔUn控制,没有一定的偏差,电动机不能工作。因此,采用比例调节器的系统是稳态转速有静差调速系统,静差是指稳态有偏差的系统。
在起动过程中电机转速有超调,产生转速超调的原因是:虽然随着n↑,在n=n∗时ΔUn、Uc都为0,但是变流器存在失控时间,电枢回路有电感,模拟调节器还有退饱和时间,使Ud和Id的下降都要滞后一些时间,在这段时间里,电动机转速会继续上升,于是转速出现了超调。
在比例调节器控制的电动机起动过程中,起动瞬间ΔUn最大、Ud最高,但电动机反电动势E为0,使Id迅速上升到最大值,这时电动机增速很快。之后随转速上升,ΔUn变小,电动机反电动势E逐步增加,Id减小,电动机增速变缓,在整个起动过程中,电流不能维持在最大状态,电动机不能以最大转矩升速,使起动时间较长。同时,起动瞬间起动电流很大,将造成电流冲击,而过大的起动电流会对变流器和电动机的安全造成危险。
2.抗扰性能
调速系统的扰动是指除转速给定Un∗以外的所有能引起转速变动的因素,其主要扰动有负载变化、供电电源电压变化、调节器参数变化、电动机励磁变化、测速发电机励磁变化、转速反馈电位器分压比的改变引起转速反馈系数的变化等,如图1.16所示。电动机工作时的热态电阻值和冷态时不同,一般热态电阻值高于冷态电阻,电阻值的变化影响电动机的电流和转矩,因此也是一种扰动。扰动都会引起转速的变化,但是系统对扰动的反应不同。根据反馈控制理论,被反馈环包围的前向通道上的扰动可以被抑制或克服,而反馈通道上的扰动是不能克服或抑制的。这里抑制和克服有两种含义,一种含义是扰动引起的影响被削弱和减小,另一种含义是扰动影响被消除,究竟是哪一种要根据具体情况作具体分析。
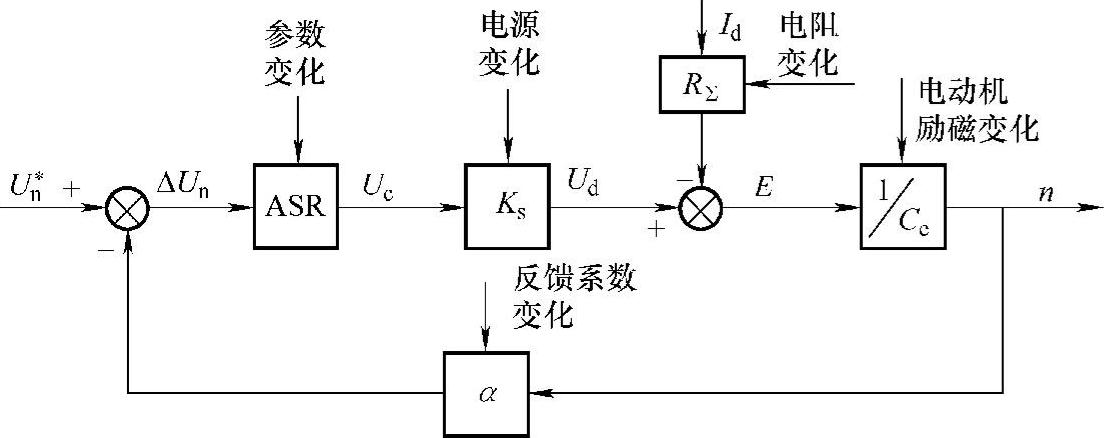
图1.16 调速系统的主要扰动
在转速闭环调速系统中,负载变化、供电电源电压变化、调节器参数变化、电动机励磁变化等,都是被转速反馈包围的前向通道上的扰动,它们的变动都会引起转速变化,并被测速发电机检测到,从而使反馈值Un和转速偏差ΔUn发生变化,然后经调节器和变流器调节电动机的电压、电流,使电动机转速上升或下降,减小这些扰动引起的转速变化,因此这些扰动是可以被抑制的。测速发电机励磁变化和转速反馈电位器分压比的变化等属于反馈环上的扰动,它们会引起反馈系数变化,使反馈值不准确,因此它们的影响不能被克服。下面举例说明。
(1)负载扰动 负载扰动首先将引起转速变化,由式(1.5),若Te>TL, 为“+”,电动机加速;Te<TL,
为“+”,电动机加速;Te<TL, 为“-”,电动机减速。因此在负载增加时,系统的调节过程如下:(https://www.chuimin.cn)
为“-”,电动机减速。因此在负载增加时,系统的调节过程如下:(https://www.chuimin.cn)

经过调节,负载增加引起的转速下降被克服,但是因为采用的是比例调节器,所以转速不会恢复到扰动发生前的值(见图1.15中的加载过程),但是与开环系统相比,负载增加引起的转速降将大大减小。
(2)电源扰动 电源扰动将引起变流器输出电压和电枢电流变化,从而影响电磁转矩使转速变化,转速变化将引起系统的调整,其调整过程与负载引起转速变化后的调节过程类同。以下是电源电压Us下降时系统的调节过程,经过调节,电源电压下降引起的转速下降被减小:

(3)转速反馈系数变化的扰动和系数整定
1)转速反馈系数引起的扰动。在转速给定和负载都不变时,若某种原因使转速反馈系数发生变化,则转速反馈值和转速偏差值ΔUn与正常时相比都会发生改变,将使控制电压Uc和整流器输出电压Ud都不是正常时的值,电动机的转速也必然不是原来的转速,这种变化是系统不能克服的。例如,1500r/min时原来整定Un=15V,对应的α=15/1500=0.01,现因为某种原因使α变为了0.009,则在Un=15V时,对应转速变成了n=(15/0.009)r/min=1666r/min,显然远远偏离了原来整定的1500r/min。因此,转速反馈系数变化是系统不能克服的扰动,系统长期运行,振动和老化都可能引起测速发动机励磁或转速反馈电位器分压比的变化,使转速反馈系数发生变化,影响系统控制的精度。
2)转速反馈系数的整定。转速反馈系数对系统转速影响很大,在系统运行前,首先要整定(调整和确定)转速反馈系数。由系统的稳态结构图(见图1.13),在转速稳定时转速反馈值应为

且

在整定时,首先断开转速反馈使系统开环工作,在电动机达到额定状态时,调节电位器RP2(见图1.12),令反馈电压Un等于式(1.27)的计算值,就完成了转速反馈系数的整定工作。在实际工作中,因为转速偏差一般较小,Un与Un∗较接近, ,所以,可首先按Un=Un∗调整RP2,然后在闭环时再略微调节RP2,使转速达到要求值。转速反馈系数整定后,电位器应锁紧,避免偶然原因造成分压比变化使α改变,影响系统工作。
,所以,可首先按Un=Un∗调整RP2,然后在闭环时再略微调节RP2,使转速达到要求值。转速反馈系数整定后,电位器应锁紧,避免偶然原因造成分压比变化使α改变,影响系统工作。
3.反馈控制系统的准确度
从以上分析可知,转速跟随给定变化,改变给定值Un∗,转速即随之改变,这是系统正常的调节。虽然改变反馈系数α也能使转速改变,但这种方法仅使用在系统进行整定的时候。此外,因为α变化而造成的转速改变是不正常的,是系统不可克服的扰动,所以应予以避免。在实际系统中,尤其是在模拟元件组成的控制系统中,用作给定信号的稳压电源和测速机输出电压信号都含有一定的纹波成分,这些纹波同样会引起转速变化并影响系统的控制准确度。为了减小这些纹波对转速的影响,一般在给定和反馈环节中加滤波器,滤掉给定和反馈信号中的高频脉动成分,从而提高系统的控制准确度。采用高精度稳压电源或采用数字给定和数字测速也是提高系统准确度的重要措施。
相关文章

图1.10 调压调速静特性调速范围与静差率的关系 生产机械一般不仅要求转速能在一定范围内调节,并且要求负载等变化对转速的影响小,以保证生产过程的稳定性,提高产品质量。也就是说,要求在一定调速范围内,尽管负载变化,但静差率都小于规定指标。调速系统主要的抗扰性能指标有动态降落ΔCmax和恢复时间tv等,如图1.11b所示。......
2025-09-29

由系统的传递函数框图可得EPC系统的开环传递函数为式中 k——开环放大系数,。将算得的ωh、ξh、k代入式,可据此画出EPC系统的开环伯德图。图12-18 改造前后CP机组EPC系统的开环伯德图由图12-18可得系统的性能指标为:①穿越频率:ωc=2.4Hz;②幅值裕量:h=16dB;③相位裕度:γ=75°。可见实测值和理论分析值比较接近,说明上面建立的EPC系统的数学模型和确定的参数是正确的,是可以作为预测改造后系统性能的依据的。......
2025-09-29

由上述分析可知:某硅钢片厂跑偏控制EPC系统可以简化成一个三阶系统。上面从理论上分析了现有EPC系统及改造后EPC系统的动态特性,并实测了CP机组和CW机组的频宽,现将结果综合列在表12-3中。表12-3 EPC系统的性能参数由表12-3可以看出:1)增大活塞有效面积和卷重后,系统的开环放大系数k将降低,快速性和卷取精度都受影响。......
2025-09-29
利用CP机组动特性分析中得到的数学模型和公式,代入CW机组的结构参数就可以得到CW机组的动特性指标。由于分析过程相同,下面只将CW机组的参数和特性指标列出。将算得的ωh、ξh、k代入式,可据此画出现有CW机组EPC系统开环伯德图,如图12-20中的曲线A和曲线B所示。改造后的动特性指标预测ωh=73.48s-1=11.7Hzξh=0.21图12-20 改造前后CW机组EPC系统的开环伯德图开环放大系数,k=14.78s-1=2.35Hz。......
2025-09-29

2)性能分析当溢流阀稳定工作时,作用在滑阀上的力是平衡的,在不考虑阀芯的自重和摩擦的情况下,阀芯受力的平衡方程式为:式中p——作用在阀芯上的液压力;Fs——弹簧作用力;A——阀芯截面积;K——调压弹簧的刚度;x0——弹簧的预压缩量;Δx——弹簧的附加压缩量。图4.32为溢流阀的图形符号。图4.34 所示为Y1 型溢流阀结构,这种阀是一些液压系统中普遍使用的形式。Y 型溢流阀的最大调整压力为6.3 MPa。......
2025-09-29

转差频控制的基本思想是采用转子速度闭环控制,速度调节器通常采用PI控制。它的输入为速度设定信号和检测的电动机实际速度之间的误差信号,速度调节器的输出为转差频率设定信号。速度调节器的限幅值决定了系统的最大转差频率。因此,控制转差角频率可以实现对电磁转矩Te的控制,达到控制转速的目的。......
2025-09-29

如图3.5所示显示出了两个算法程序的运行时间。此图验证了前一自然段中的时间效率分析,表明CpecuFind时间效率的优势显著。表3.54个ROC曲线下方面积对比结果图3.6两算法在30+330数据集上计算的ROC曲线PecuFind;CpecuFind图3.7两算法在550数据集上计算的ROC曲线Pecu Find;Cpecu Find由此,4个ROC曲线的对比说明,CpecuFind算法性能优于Pecufind算法性能。......
2025-09-29

系统切换是指冗余CPU判断是否需要进行系统切换之后自动切换控制系统与待机系统,包括控制系统异常时的切换和由网络模块的系统切换请求而进行的切换。......
2025-09-29
相关推荐