基于系统分析的需要,下面介绍一些传递函数的概念。在图2-20中,将反馈环节H的输出端断开,则前向通道传递函数与反馈通道传递函数的乘积G1G2H称为系统的开环传递函数,相当于B/E。因此有5.闭环系统的误差传递函数误差大小直接反映了系统的控制精度。令n=0,则可由图2-20转化得到的图2-23求得n作用下闭环系统的扰动误差传递函数Φen。......
2023-06-28
电力电子变流器是调速系统重要的装置,直流调速系统的变流器主要有AC/DC整流器和DC/DC斩波器,前者在小功率大功率系统中都有应用,后者目前主要使用在中小功率调速系统中。
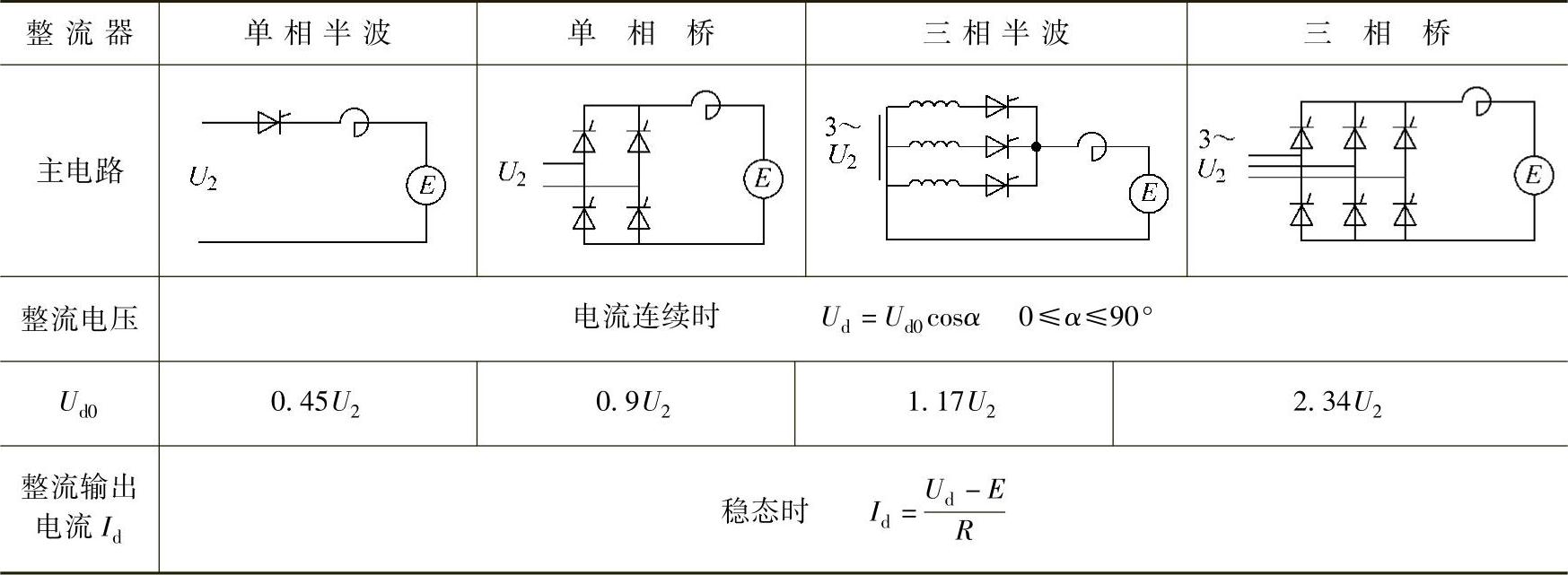
(1)整流器 目前应用的电力电子整流器主要是晶闸管整流器,采用可关断器件的PWM整流器可以控制网侧功率因数,但是成本较高,目前使用还不普遍。晶闸管整流器的特点是:采用相位控制,通过脉冲移相控制晶闸管触发时刻调节输出电压,输出电压的脉动与整流相数有关,一般在直流回路串电感(平波电抗器)来减小输出电压和电流的脉动。常用的整流器主电路见表1.1。
表1.1 整流器
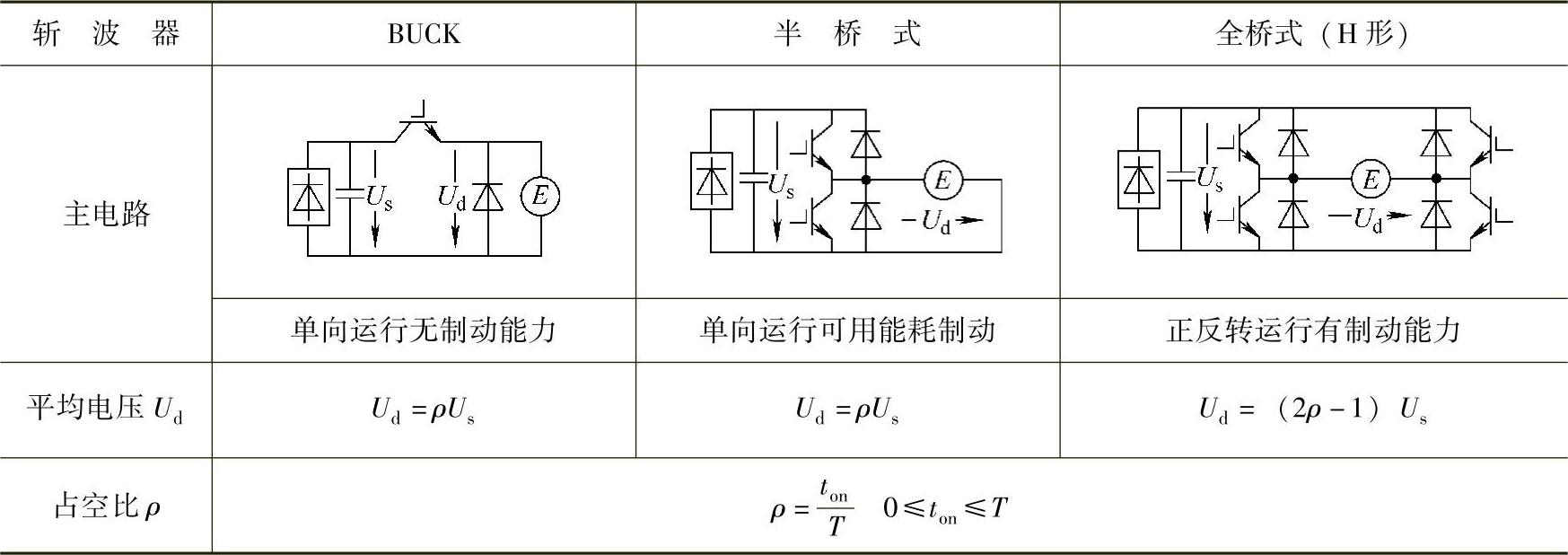
(2)斩波器 电力电子斩波器采用可关断器件(MOSFET、IGBT等)和PWM调制,其调制频率较高,输出电流脉动小、响应快,但由于受器件容量限制,因此目前主要使用在小功率高性能的调速系统中。斩波调速的调制频率较高,依靠电动机电枢电感电枢电流就可以连续,因此电枢回路一般不必串联平波电抗器,使系统体积、重量都大大减小。常用的斩波器主电路见表1.2。
表1.2斩波器
2.电力电子变流器的传递函数
(1)失控时间 电力电子变流器依靠脉冲移相(晶闸管)或改变脉冲宽度(PWM)来调节输出电压,晶闸管脉冲移相和PWM调制在原理上都是由锯齿波和控制信号Uc比较来产生脉冲信号,如图1.8所示。由图可以看出,虽然t1时Uc发生了变化,但是并不能立刻产生脉冲,而要到t2时才能产生驱动脉冲信号,中间有时间滞后ts(ts=t2-t1),而且在ts内输出脉冲和变流器输出电压也都不会变化,因此ts称为失控时间。显然,ts是随机不固定的,这在系统设计时很不方便,工程上常用ts的最大值(即锯齿波周期Ts)或平均值Ts/2作为变流器的失控时间常数。晶闸管整流器的失控时间见表1.3。
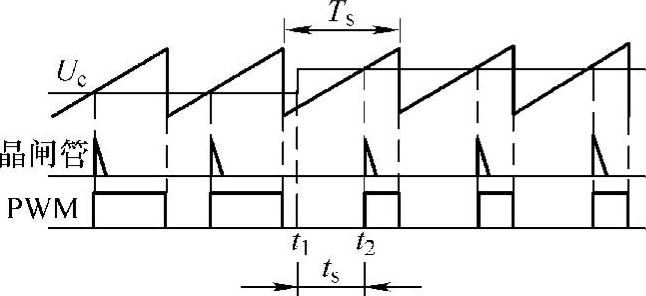
图1.8 失控时间
表1.3 晶闸管整流器的失控时间(f=50Hz)

(2)传递函数 电力电子变流器从输入控制信号改变到输出电压变化中间有时间延迟,因此是一个滞后控制环节,其传递函数(见图1.9)为

式中,Ks为变流器放大倍数;Ts为变流器失控时间常数。
Ks和Ts在PWM变流器时常表示为KPWM和TPWM。
含有滞后环节的系统,属于非最小相位系统,分析和设计时都比较复杂,为了简化,一般将指数项e-TsS用泰勒级数展开,考虑到失控时间Ts较小,忽略其高次项后,电力电子变流器的传递函数可以近似为一阶惯性环节。
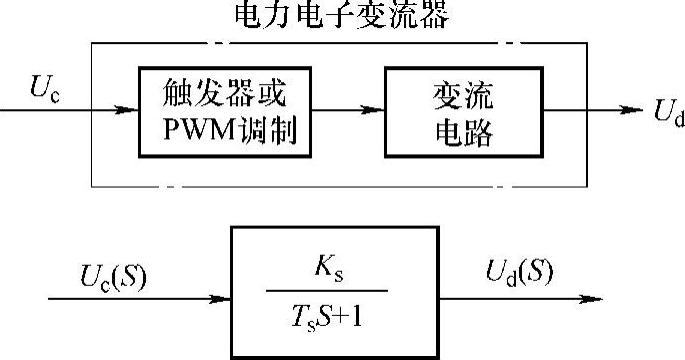
图1.9 变流器传递函数

1)放大倍数

因为变流器的输入/输出特性不一定是线性的,例如晶闸管整流器输出电压Ud与触发延迟角α为余弦关系(见表1.1),放大倍数Ks在实际使用中可以实测几点输出电压和控制电压之比,然后求平均值,或者以变流器额定输出电压UdN和额定电压时的控制电压UcN进行估算。
2)失控时间常数Ts(TPWM)如下:
对晶闸管整流器

对PWM斩波器

式中,m为整流电压波头数;f为交流电源频率,工频为50Hz;fPWM为斩波器调制频率。
有关电机运动控制系统的文章

基于系统分析的需要,下面介绍一些传递函数的概念。在图2-20中,将反馈环节H的输出端断开,则前向通道传递函数与反馈通道传递函数的乘积G1G2H称为系统的开环传递函数,相当于B/E。因此有5.闭环系统的误差传递函数误差大小直接反映了系统的控制精度。令n=0,则可由图2-20转化得到的图2-23求得n作用下闭环系统的扰动误差传递函数Φen。......
2023-06-28

在输电领域,随着电力电子器件和电力电子学的发展,新的更加灵活有效的输配电形式正在大量涌现。然而,高压直流输电需要增加由电力电子装置构成的换流站,以便在发电端将交流变换为直流,而后在负载端再将直流变换为交流。......
2023-06-23
双功能型电子消毒柜的工作原理与高温型和低温型电子消毒柜基本相同,科凌ZTP-63A型双功能型电子消毒柜其电气原理如图4-6所示,全电路由高温消毒电路、保温电路和臭氧消毒电路3部分组成。220V交流电源经超温熔断器FU分成两路,一路经高温消毒温控器ST1、K1、K构成控制回路。另一路经K2、石英发热管E1、E2及HL1构成发热回路,E1、E2通电升温。图4-5 双功能型电子消毒柜结构图图4-6 科凌ZTP-63A型电子消毒柜原理图......
2023-06-18
电子式互感器在一次平台上完成模拟量的数值采样,利用光纤传输将数字信号传送到二次的保护、测控和计量系统。图3-5空芯线圈互感器光学电子式电流互感器利用法拉第磁光效应感应被测信号,分为磁光玻璃式和全光纤式两种方式,如图3-6 所示。图3-6磁光玻璃式和全光纤式互感器电子式电压互感器利用电容分压器测量电压,要求其具有较好的精度、温度稳定性及暂态特性。图3-7电容式互感器......
2023-06-28

上述三个特征值把日负荷图划分为三个区域,即峰荷区、腰荷区及基荷区。年负荷图表示一年内电力系统负荷的变化过程。一条是月最大负荷年变化曲线,依据每月最大负荷日的最大负荷值绘制,它表示电力系统各月所需的工作容量。图G6.5日负荷图电力系统的负荷,随着国民经济的发展是逐年增长的。......
2023-06-21

什么是电子政务?这里采用的是狭义的电子政务概念,专门指政府部门的管理和服务活动。电子政务的应用主要体现在以下几个方面。图21.3电子政务系统结构●电子邮递:建立政府整体性的电子邮递系统,并提供电子目录服务,以提高政府之间及政府与社会各部门之间的沟通效率。对很多地方政府而言,在电子政务信息化建设中已有很大的投入,并按照业务需求建立起了许多独立的业务处理系统。......
2023-10-28

目前,电子鹰眼系统已经应用到生活中去,例如网球比赛中、矿井工作查询、街道安全系统等。这也可以认为是电子鹰眼应用的拓展。有些人担心电子鹰眼的出现会是另外一种形式的“恐怖活动”。而网球赛场上早已成功引进了电子鹰眼。球员挑战鹰眼不仅没有影响比赛的精彩程度,反而维护了公正性。但是足球运动一直没有引入电子鹰眼的意思,而这次的误判很可能促使电子科学技术在足球领域的发展。......
2023-11-21

电子邮件是因特网上使用最广泛的一种服务,具有速度快、费用低等优点。邮件服务器只负责将消息存放到接收者的电子信箱内,并告知接收者有新邮件到来。其中,SMTP负责电子邮件的发送,POPS则负责邮件接收。......
2023-11-26
相关推荐