本节的全三维不恒定流和泥沙数学模型基本方程建立在平面正交曲线坐标和立面σ坐标系下:5.5.1.1水流运动基本方程连续方程平面ξ方向的动量方程连续方程平面ξ方向的动量方程平面η方向的动量方程平面η方向的动量方程垂线σ方向的动量方程垂线σ方向的动量方程动量方程式~式中DP1,DP2,DP3项分别为压力P=pa+ps+pd在ξ,η,σ方向上的梯度项,pa为水面处大气压强,ps为静水压强,pd为动水压强。......
2023-06-22
直流电机模型如图1.2所示。励磁绕组在定子上,定子绕组通以励磁电流If产生定子励磁磁动势Fs,励磁磁动势Fs产生主磁通Φ。直流电机转子绕组是旋转的,但是换向器电刷将电枢分成左、右两部分(见图1.1),这两部分绕组的电流方向相反,使旋转的电枢绕组相当于一个沿电刷轴线方向的位置固定静止不动的线圈(图1.2中的转子绕组)。也就是说,旋转转子绕组产生的磁动势Fr方向是固定的,并且与定子励磁磁动势Fs方向垂直。如果将励磁磁动势Fs定位在横坐标上,称直轴或d轴(direct axis),则与之垂直的转子磁动势Fr位于纵坐标上,称交轴或q轴(quadrature axis)。直流电机模型就是由两个互相垂直的线圈组成的。
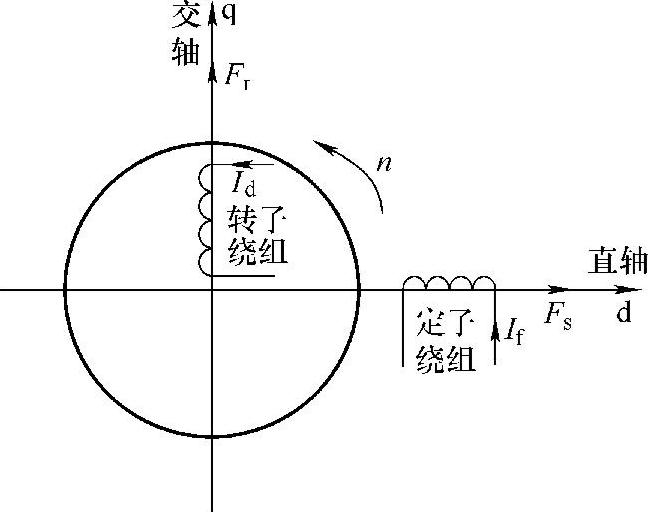
图1.2 直流电机模型
直流电机模型的特点如下:
1)定子励磁磁动势Fs与转子磁动势Fr互相垂直(正交),从控制意义上而言,定子励磁磁动势Fs和转子磁动势Fr互相独立,可以分别控制。电机转矩
Te=KTFsFrsinφ
式中,KT为转矩系数;φ为Fs和Fr的夹角。
对于直流电机,φ=90°,Te=KTFsFr,说明若控制励磁电流If保持励磁磁动势Fs(即主磁通Φ)不变时,控制电枢电流Id就可以控制转子磁动势Fr,进而控制电机转矩进行调速。
2)模型中的电枢绕组是静止的,实际上电枢绕组随转子转动,因此电枢绕组的静止是假的,故称为“伪静止绕组”。“伪静止绕组”的旋转作用表现为转子的反电动势E。
2.直流电动机的基本方程
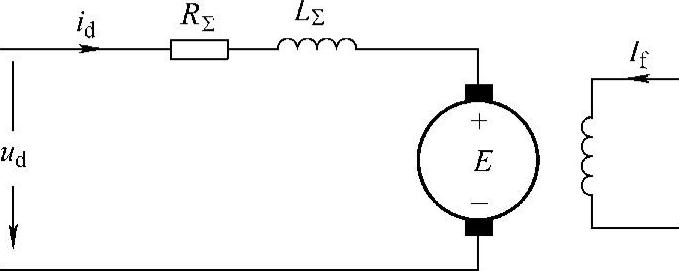
(1)电压方程 直流电动机电枢等效电路如图1.3所示,电枢回路电压方程为

E=KeΦn (1.2)
式中,ud为电枢外接直流电源电压;E为电枢反电动势;RΣ为电枢回路的等效电阻(包括电枢电阻、变流器内阻、平波电抗器电阻等);LΣ为电枢回路的等效电感(包括电枢电感、变压器漏感、平波电抗器电感等);Ke为电机电动势常数, ;p为磁极对数,N为电枢导体总数,a为电枢导体并联支路数;Φ为每极下磁通量(Wb);n为转速(r/min)。
;p为磁极对数,N为电枢导体总数,a为电枢导体并联支路数;Φ为每极下磁通量(Wb);n为转速(r/min)。
在电动机稳态时,电动机转速保持不变,电压和电流也稳定不变,这时电感电动势 ,将电压和电流以平均值Ud、Id表示,稳态时电枢回路的电压方程为
,将电压和电流以平均值Ud、Id表示,稳态时电枢回路的电压方程为
Ud=RΣId+E (1.3)
(2)电动机的电磁转矩 电磁转矩方程式为
Te=KmΦId (1.4)
式中,Km为电动机转矩常数,

。
(3)电动机的运动方程 电动机带动机械负载转动,设负载的转矩为TL,电动机带动负载的运动方程式为

若将机械负载转矩TL折算为负载电流IdL,则

式中,J为转子转动惯量;np为极对数;ω为转子转动角速度(rad/s);GD2为电动机飞轮力矩(kg·m)。
当Te>TL(Id>IdL)时, ,电动机作加速运动,转速上升;当Te<TL(Id<IdL)时,
,电动机作加速运动,转速上升;当Te<TL(Id<IdL)时, ,电动机作减速运动,转速下降;当Te=TL(Id=IdL)时,
,电动机作减速运动,转速下降;当Te=TL(Id=IdL)时, ,电动机保持转速不变。
,电动机保持转速不变。
有关电机运动控制系统的文章

本节的全三维不恒定流和泥沙数学模型基本方程建立在平面正交曲线坐标和立面σ坐标系下:5.5.1.1水流运动基本方程连续方程平面ξ方向的动量方程连续方程平面ξ方向的动量方程平面η方向的动量方程平面η方向的动量方程垂线σ方向的动量方程垂线σ方向的动量方程动量方程式~式中DP1,DP2,DP3项分别为压力P=pa+ps+pd在ξ,η,σ方向上的梯度项,pa为水面处大气压强,ps为静水压强,pd为动水压强。......
2023-06-22

将φ 乘以Boltzmann方程的两边,对整个颗粒脉动速度空间积分,获得φ 的输运方程。因此,可以通过假设颗粒的速度分布函数获得颗粒流的应力和能量通量等的表达式,或者用统计平均的办法建立各类守恒型方程来描述颗粒流的平均运动。因此,需要通过一定假设,建立泥沙颗粒相的本构关系。......
2023-06-22

冷却塔中传质和传热同时进行,冷却塔热力计算的方法目前国内外用得较多的是焓差法,这里主要介绍焓差法。a/kX=为Lewis比例系数,利用其上式可进一步简化写成:以容积传质系数kXVkg/代替kXa,填料塔微元体积dV代替Fdz,得和分别为饱和空气与微元内空气的焓,是冷却的推动力,式简称焓差方程,为冷却塔计算的基本方程式。......
2023-06-19

10.4.1.2推移质不平衡输沙方程窦国仁推移质不平衡输沙方程式为:式中:γ和γs分别为水和泥沙颗粒容重;Hw和T 分别为平均波高和周期;根据多处海域资料求得α0=0.023,β0=0.04fw,fw为波浪摩阻系数;谢才系数用满宁公式确定,即C为床面糙率系数。......
2023-06-22
引例例1 已知曲线上任一点的切线斜率等于该点横坐标的两倍,试建立其方程.解 所求曲线应满足方程例2 质量为m的物体只受重力的作用自由下落,试建立其路程s与时间t的关系.解 把物体降落的铅垂线取作s轴,其指向朝下(朝向地心).设物体在t时刻的位置为s=s(t),加速度.由牛顿第二定律F=ma,得这是由著名科学家伽利略研究发现的,自由落体的重力加速度为常数g.例3 某商品在t时刻的售价为P,社会对该商......
2023-11-22
前面介绍了利用位移法基本结构来建立位移法方程。位移法典型方程实质上代表了原结构的结点和截面的平衡条件。因此,位移法方程的建立可以不通过附加约束的基本结构,而是利用杆件的物理方程[式(7-1)至式(7-4)],直接取结点和截面一侧为隔离体的平衡条件,来建立以结点位移为未知量的位移法方程。利用等截面直杆的物理方程式(7-1)、式(7-2)及表 7-1,由跨度 l=12 m,高 h=6 m,可得图7-16建立位移法方程。......
2023-08-30

例2-1 列写如图2-1所示RLC网络的微分方程。列出原始微分方程式。将式(2-2)两边求导,得代入式(2-1)整理为显然,这是一个二阶线性微分方程,也就是如图2-1所示RLC无源网络的数学模型。因此,直流电动机的运动方程可以由以下三部分组成。现分别列写各元部件的微分方程。比较式(2-4)、(2-8)、和后发现,虽然它们所代表的系统的类别、结构完全不同,但表征其运动特征的微分方程式却是相似的。......
2023-06-28

2)隐极式同步电动机电磁功率。代入式(6.3)得从式(6.3)和式(6.4)可见,同步电机电磁功率都是θ角的正弦函数,因此θ称为功率角。将式(6.3)和式(6.4)代入上式可得:凸极式同步电动机电磁转矩隐极式同步电动机电磁转矩从式(6.5)、式(6.4)可知,同步电机转矩都是θ角的正弦函数,因此θ也称转矩角。......
2023-06-19
相关推荐