一般的,变频器的速度控制流程如图8-4-6所示。表8-4-2 变频控制信号说明图8-4-7中,虚线框内是CMPU(主微机)与变频器进行通信的电路,CM-PU直接将速度指令传送给变频器。使用RS485以通信方式控制变频器速度,通信方式虽然非常灵活,但容易受干扰。......
2025-09-29
FR-A700变频器可以选择U/f控制(初始设定)、矢量控制、实时无传感器矢量控制等控制模式(各控制方式已在前面介绍过)。
矢量控制和实时无传感器矢量控制
矢量控制是驱动感应电动机时的一种控制方法。为说明矢量控制的原理,图7-1给出了感应电动机的基本等价回路。
图7-1中通过感应电动机的电流可分为在电动机内部产生磁通的电流id(励磁电流)和使电动机产生转矩的电流iq(转矩电流)。
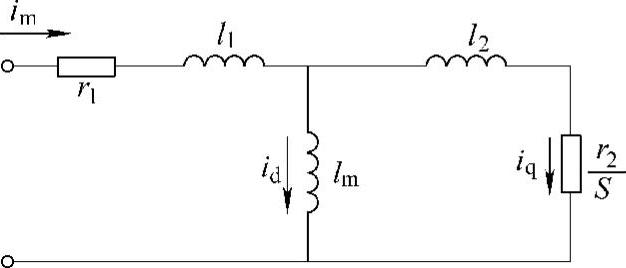
图7-1 感应电动机的等价回路
r1—1次侧电阻 r2—2次侧电阻 ∫1—1次侧漏电感 ∫2—2次侧漏电感 ∫m—相互电感 S—转差 id—励磁电流 iq—转矩电流 im—电动机电流
矢量控制图如图7-2所示,是为尽可能使左图励磁电流和转矩电流达到最优化,而对电压及输出频率进行计算、并对电动机进行的控制。
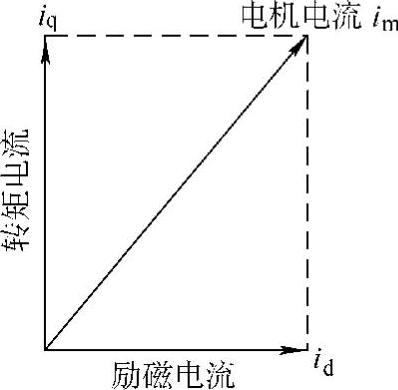
图7-2 矢量控制图
(1)控制励磁电流使电动机内部磁通进入最佳状态。
(2)求出转矩指令值,尽可能使电动机转速指令和电动机轴连接的PLG的实际转速(实时无传感器矢量控制的情况下为速度指定值)之间的差为0。控制转矩分电流以便按照该转矩指令值输出转矩。
电动机产生的转矩TM和转差角速度ω2,电动机的2次侧磁通Ф2可分别通过式(7-1)、式(7-2)、式(7-3)计算。

式中 L2——2次电感,可按式(7-4)计算
L2=∫2+M(7-4)
进行矢量控制具有以下几个优点:
1)相对于U/f控制等其他控制方法,控制性能更为优越,可实现与直流电动机同等的控制性能。
2)要求具有高响应的应用领域,要求可变速范围从极低速到高速的应用领域,以及要求进行繁复的加减速运转或连续四象限运转等应用领域,均可适用。(https://www.chuimin.cn)
3)可以控制转矩。
4)可在电动机轴停止的状态下,对产生转矩的伺服锁定转矩进行控制。(实时无传感器矢量控制的情况下无法进行该操作。)
实时无传感器矢量控制模块图与矢量控制模块图分别如图7-3、图7-4所示,它们的工作过程如下:
1)速度控制。进行速度控制计算,尽可能使速度指令ω∗和PLG的实际运转检测值FB差为0。此时,求出电动机的负荷,并将计算结果作为转矩电流指令iq∗传给电流控制器。
2)转矩电流控制。根据速度控制器计算出的转矩电流指令iq∗,计算相同电流iq所需的电压Vq。
3)磁通控制。根据励磁电流id计算电动机磁通Φ2,并根据该电动机磁通Φ2所需磁通计算励磁电流指令id∗。
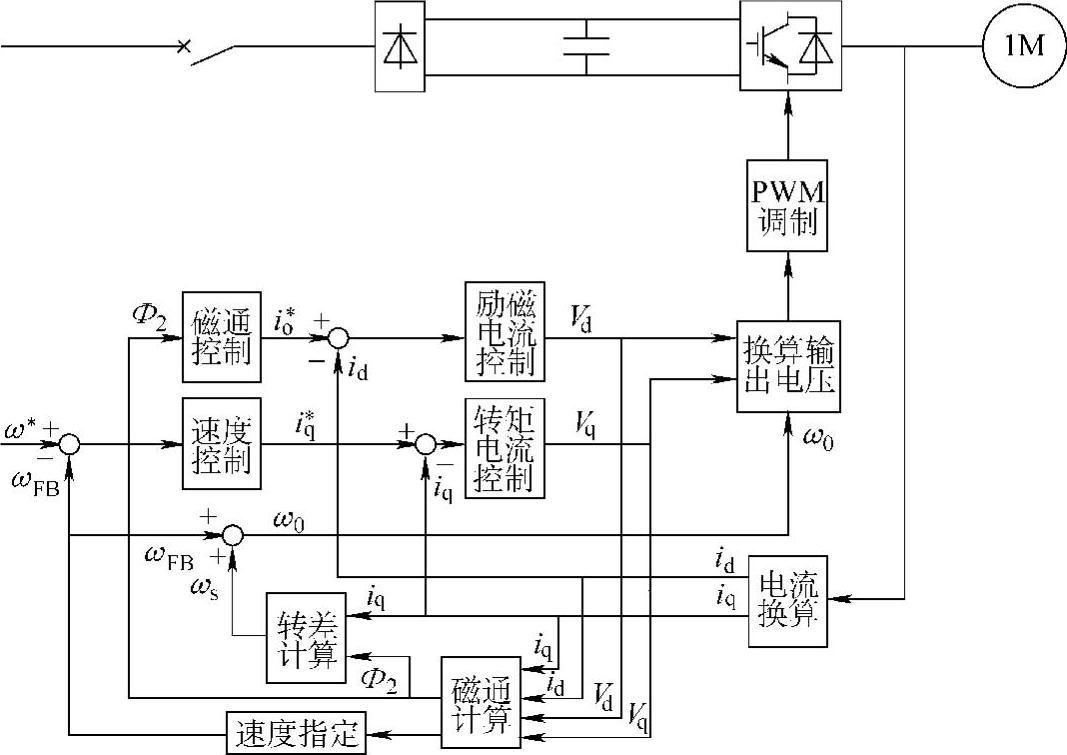
图7-3 实时无传感器矢量控制模块
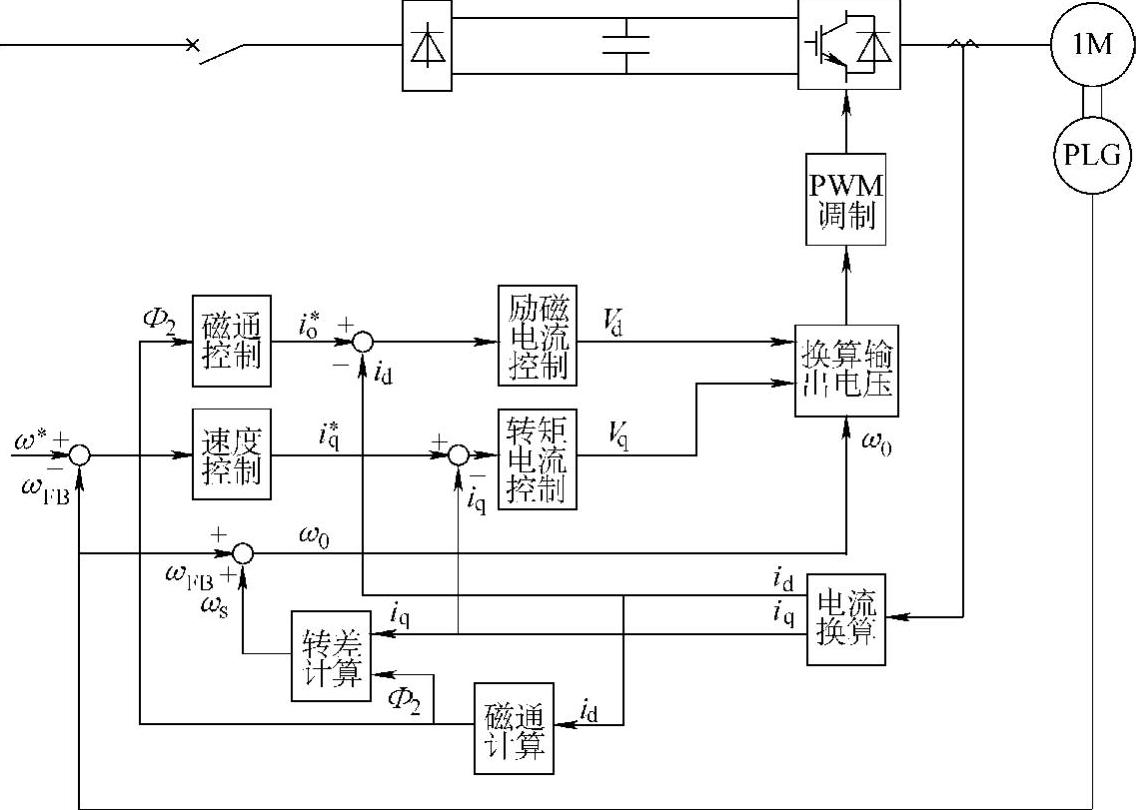
图7-4 矢量控制模块图
4)励磁电流控制。根据磁通控制所要求的励磁电流指令id∗,计算相同电流id所需的电压Vq。
5)计算输出频率。根据转矩电流值iq和磁通Φ2计算电转差ωS。输出频率根据PLG反馈信号计算ωFB,并加上转差ωS,从而求得输出频率ω0。
根据上述计算结果进行PWM调制,运行电动机。
6)基于实时无传感器矢量控制。矢量控制的速度控制是使所控制电动机的实际转速与速度指令保持一致。
控制方块图(部分)如图7-5所示。
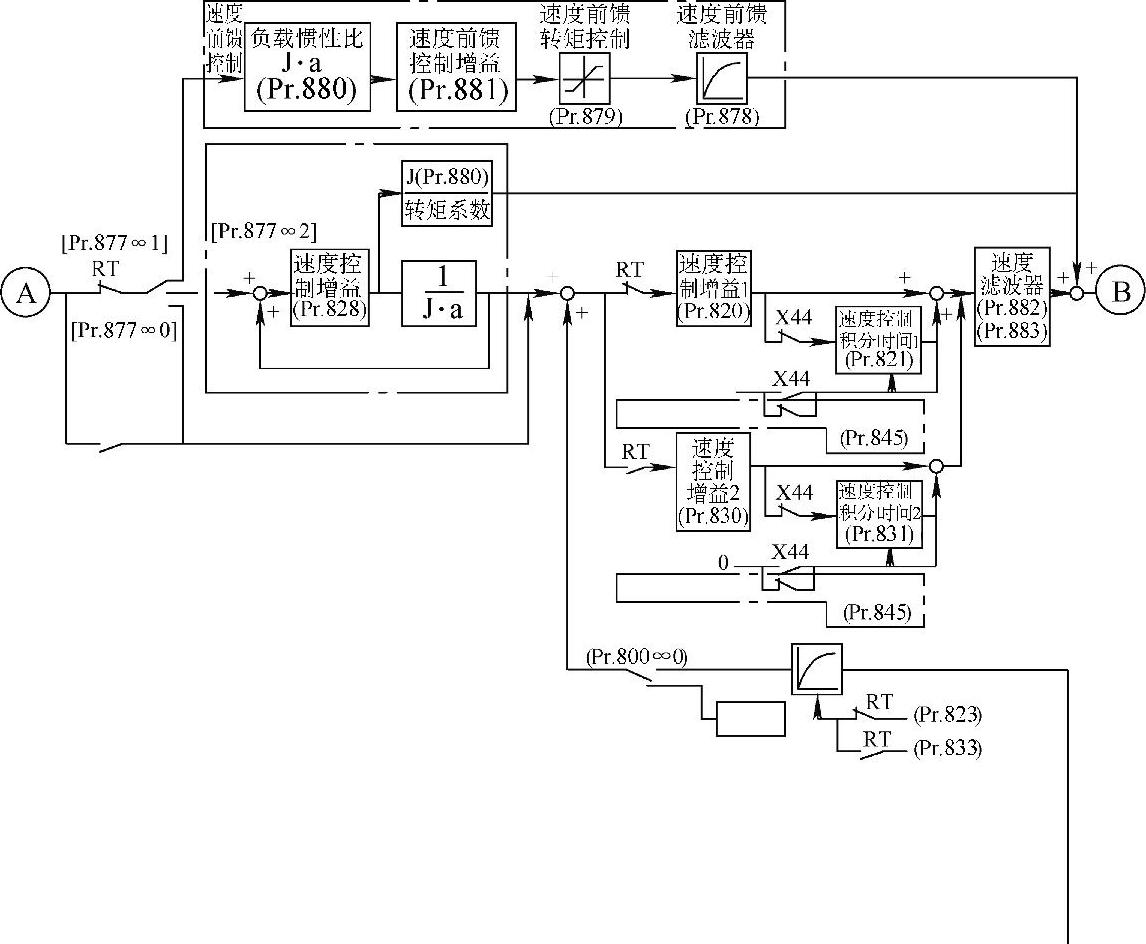
图7-5 控制方块图(部分)
相关文章

一般的,变频器的速度控制流程如图8-4-6所示。表8-4-2 变频控制信号说明图8-4-7中,虚线框内是CMPU(主微机)与变频器进行通信的电路,CM-PU直接将速度指令传送给变频器。使用RS485以通信方式控制变频器速度,通信方式虽然非常灵活,但容易受干扰。......
2025-09-29

实操目的1.通过实操训练,进一步加强对三相异步电动机控制电路图的阅读能力。实操内容及其步骤1.检查各个电器的型号和规格是否符合要求;2.按使用的变频器说明书提供的电路图进行接线;3.检查接线无误后,通电进行调速,并注意观察三相异步电动机的转速变化情况;4.实操结束后,要进行归纳总结,写出实操报告。......
2025-09-29

图3-40分拣单元的气路原理图2.分拣单元的电路连接分拣单元的电路同样分为桌面上的装置侧和桌面下的PLC侧。表3-13分拣单元装置侧端子排接线的分配续表分拣单元台面上的装置侧气路和电路接线注意事项:①装置侧输入端接线端子排上层的+24 V电源端只能作为传感器的正电源端,切勿用于电磁阀执行元件的负载。......
2025-09-29

图9.10 为工作台位置控制系统的工作原理图。图9.10工作台位置电液控制系统1—输入电位计;2—反馈电位计;3—放大器;4—电液伺服阀;5—液压缸;6—齿条齿轮副;7—工作台图9.11电液伺服系统的职能方块图θr—输入电位计转角;θc—反馈电位计转角;Ur—输入电位计输出端电位;Uc—反馈电位计输出端电位;i—电液伺服阀输入电流;ΔU=Ur-Uc;q—电液伺服阀输出流量;y—活塞位移......
2025-09-29

LED控制系统由控制系统和驱动系统两大部件组成。LED控制系统内置高性能单片微型控制芯片,控制器通过内部控制程序向LED驱动芯片发送控制信号和数据,LED驱动芯片根据控制信号和数据的要求,产生相应的动作,从而对每一路红、绿、蓝LED实现单独的控制。驱动系统驱动系统的功能是接收颜色数据并驱动LED按该数据所表示的亮度值显示。LED控制系统承载着控制的总功能,在LED越来越被广泛使用的今天,其功能也将越来越强大。......
2025-09-29

图3-55输送单元的气路原理图2.输送单元的电路连接输送单元的装置侧电路接线包括:机械手装置各气缸上磁性开关引出线、原点开关、左右限位开关的引出线,以及伺服驱动器控制线等连接到输送单元装置侧的接线端口。输送单元装置侧的端子排接线分配如表3-18所示。图3-56输送单元的PLC控制电路图输送单元的PLC侧接线注意事项:①输送单元的PLC采用晶体管输出,接线时须注意输出公共端的电源极性,输出公共端接电源负极。......
2025-09-29

为了增大电容量,改善滤波效果,变频器内总是先将若干个电解电容器并联成一组,然后再将两组电容器串联起来。三电平逆变的变频器,输出波形中会不可避免地产生较大的谐波分量,因此在变频器的输出侧必须配置输出滤波器才能用于普通的笼型电动机。......
2025-09-29

相关推荐