学习目标1.鼓式制动器的结构和工作原理。典型的鼓式制动器主要由底板、制动鼓、制动蹄、制动轮缸、回位弹簧、定位销等零部件组成。鼓式制动器的旋转元件是制动鼓。在轿车的鼓式制动器上,一般只有一个轮缸。图5-104 自动调整间隙示意图图5-105 手动调整间隙示意图后轮鼓式制动器制动蹄的更换方法如下:1.制动蹄的拆解①举升并支撑车辆。③松开驻车制动器,并拆下制动鼓。......
2023-09-17
(1)制动情况
从高速到低速(或零速),这时电气的频率变化很快,但电动机的转子带着负载(生产机械)有较大的机械惯性,不可能很快地停止,并产生反电动势E>U(端电压),电动机处于发电状态,其产生反向电压转矩与原电动状态转矩相反,而使电动机具有较强的制动转矩,迫使转子较快停下来。由于变频器通常是交-直-交主电路,AC/DC整流电路是不可逆的,因此,电动机产生的反电动势无法回馈到电网上去,结果造成主电路电容器两端电压升高(称为泵升电压)。当电压超过设定上限值电压(700V)时,制动电路导通,制动电阻上流过电流,从而将电能变成热能消耗掉,电压随之下降,待到设定下限值(680V)时即断。这就是制动单元的工作过程。这种制动方法不可控,制动转矩有波动,但制动时间是可人为设定的。能耗制动的技术性能见表4-2。
表4-1 变频器电气制动的性能和特点
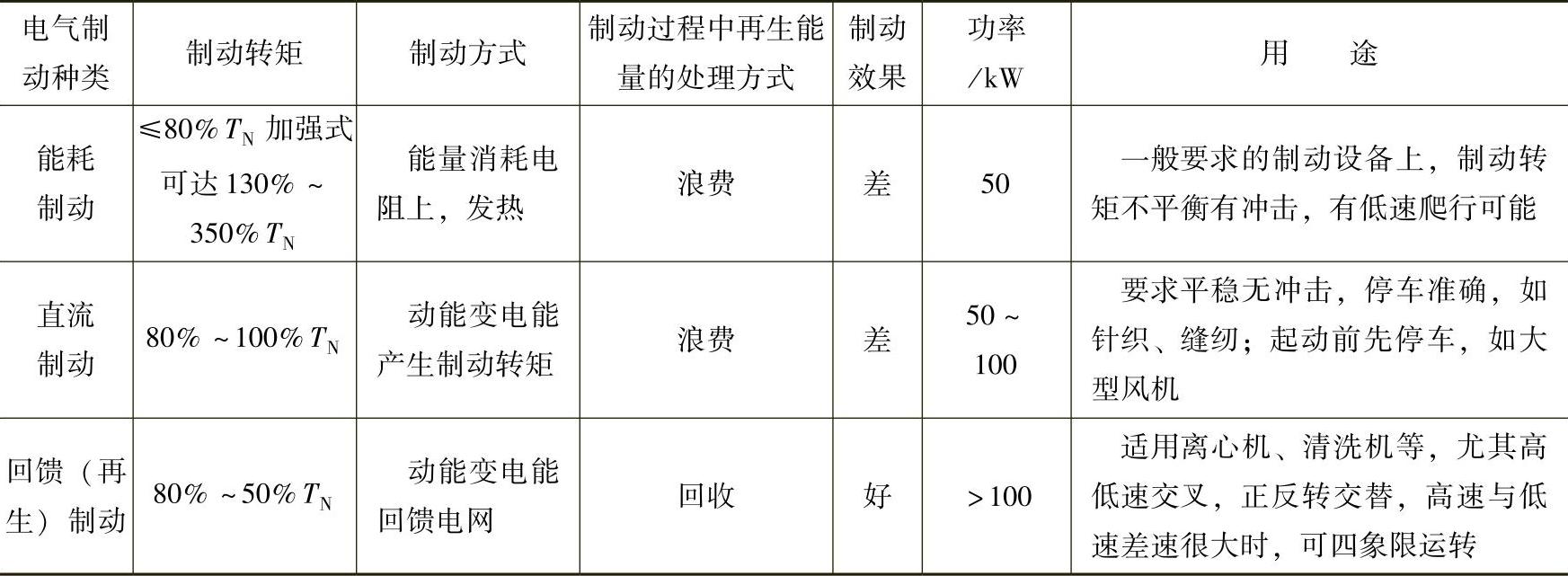
表4-2 能耗制动的技术性能

(2)制动电阻
关于制动电阻的作用和选择在3.5.1节已经说明,在实际应用中,可根据表4-3所示方法确定制动电阻,根据表4-4所示方法确定电阻功率。
表4-3 制动电阻计算方法

表4-4 电阻功率计算方法

在具体应用中须注意:
1)电阻值越小,制动转矩越大,流过制动单元的电流越大;
2)不可以使制动单元的工作电流大于其允许最大电流,否则要损坏器件;
3)制动时间通过R的不同可人为选择;
4)小容量变频器(≤7.5kW)一般是内接制动单元和制动电阻的;
5)当在快速制动出现过电压时,说明是制动电阻的阻值过大来不及放电,应减小阻值。
(3)制动电路
典型低压变频器主电路,如图4-11所示,由二极管模块组成三相桥式整流,即AC/DC电路,滤波电路为电容器C1及C2,制动电路由绝缘栅双极型晶体管V及电阻RB和二极管VD组成,三相桥式逆变器IGBT模块组成为DC/AC逆变器。
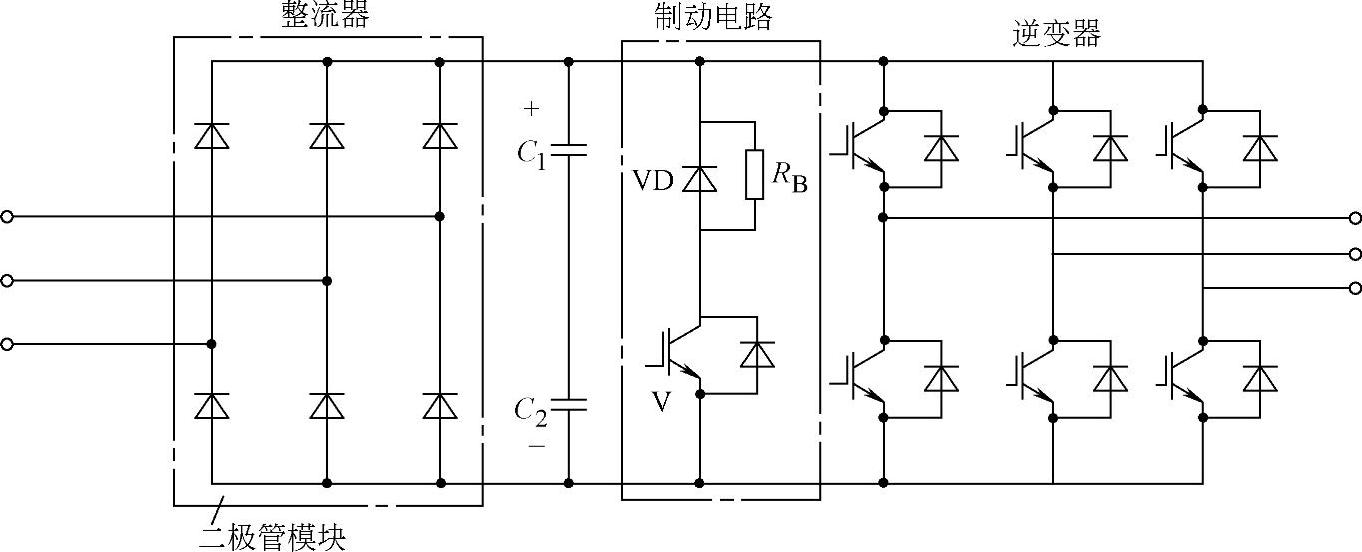
图4-11 典型低压变频器主电路
大功率管V采用GTR或IGBT均可,其主要性能参数选择如下:
1)击穿电压:UCEO=1000V即可;
2)集电极最大电流:按正常电压下,流经RB的电流ICM≥2×UD/R;
3)其他参数:放大倍数,开关时间等均无严格要求。
大功率管GTR的驱动电路如图4-12所示,在图4-12所示的驱动电路中,VD5~VD8上的电压降为GTR提供反向偏置。工作过程是,当光耦合器VLC得到信号而导通时,V1导通且饱和,V2随即导通,V3截止,使GTR导通,即有制动电流流经RB。当VLC失去信号而截止时,V1截止,随即V2截止,V3导通,CTR因反向偏置而截止。这样多次反复将电能变热能,消耗在制动电阻RB上。
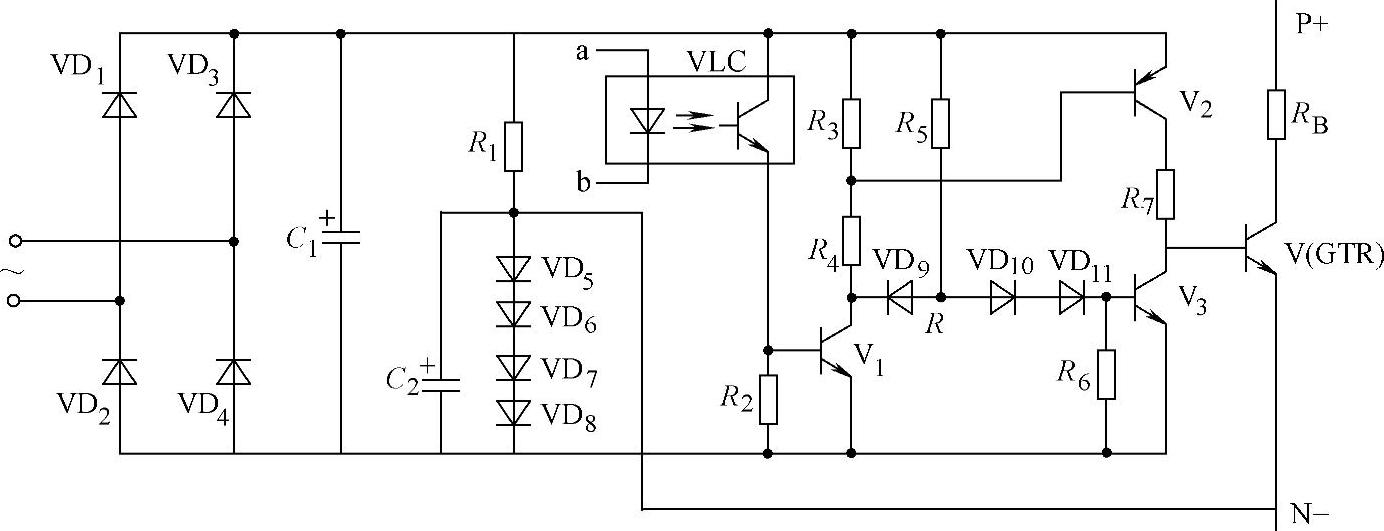
图4-12 GTR的驱动电路
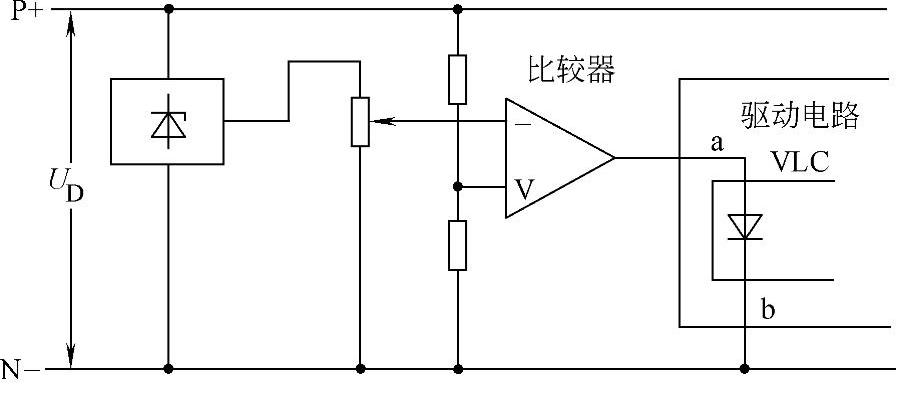
图4-13 驱动电路的工作信号的取出电路
驱动电路的工作信号的取出,一般均取直流电压作信号,如图4-13。当UD超上限值(如700V)时,比较器的输出为“+”,则光耦合器VLC输出信号电流,再推动驱动电路,实现能耗制动工作状态,当UD低于下限值(如680V)时,比较器的输出为“-”,则光耦合器VLC无输出电流,这时驱动电路不工作,处于不制动工作状态。
(4)保护电路
电阻RB的标称功率比实际消耗的电功率小得多,因此电阻若通电时间过长,必导致过热损坏,所以要有热保护,其方法有用热继电器、热敏电阻和温度开关等。
(5)主要应用场合
能耗制动的不足,是在制动过程中,随着电动机转速的下降,拖动系统动能也在下降,于是电动机的再生能力和制动转矩也在减小,所以在惯性较大的拖动系统中,常会出现在低速时停不住,而产生“爬行”现象,从而影响停车时间或停位的准确性,仅适用一般负载的停车。其特点是电路简单,价格较低。
有关西门子系列变频器及其工程应用的文章

学习目标1.鼓式制动器的结构和工作原理。典型的鼓式制动器主要由底板、制动鼓、制动蹄、制动轮缸、回位弹簧、定位销等零部件组成。鼓式制动器的旋转元件是制动鼓。在轿车的鼓式制动器上,一般只有一个轮缸。图5-104 自动调整间隙示意图图5-105 手动调整间隙示意图后轮鼓式制动器制动蹄的更换方法如下:1.制动蹄的拆解①举升并支撑车辆。③松开驻车制动器,并拆下制动鼓。......
2023-09-17

汽车ABS汽车制动是汽车工作中常见的工况,制动性能的优劣不仅关系到车辆能否正常工作,更是对车辆安全起着重要作用。从图中可以看出,没有ABS系统的车辆,紧急制动时由于前轮被抱死无法正常转向,直直地冲向障碍物,但装有ABS系统的车辆,在紧急制动时,灵活的转向使之避开了障碍物。......
2023-06-23

图9-17AER 基本功能框图2.各环节工作原理结合如图9-17所示,将工作通道各环节工作原理阐述如下。采用两个电压互感器的目的是为了防止电压回路断线时AER 误动。机端电压测量环节类似于微机保护的模拟量采集通道,为了反应对称故障与不对称故障,一般采用正序分量来反应。......
2023-06-24
为了防止这种现象发生,也为了降低油耗,当车速在大于60km/h时,锁止离合器会通过机械摩擦将泵轮与涡轮相连接。锁止离合器的接合和分离由变矩器中的液压油的流向改变来决定。加压油液流至锁止离合器的前端,锁止离合器前端及后端的压力就变得一样,锁止离合器处于脱开状态。这时,变矩器壳体受到锁止活塞挤压,从而使锁止离合器和前盖一起转动,即锁止离合器接合。锁止离合器接合时的动力传输过程如图1-3-8所示。......
2023-08-25

学习目标1.了解盘式制动器的结构和工作原理。基础知识汽车的前轮一般采用盘式制动器。盘式制动器通过制动管路利用来自主缸的液压力推动活塞,使摩擦片夹紧制动盘的两侧并使轮胎停止转动。检查并确认制动钳销C能够平稳移进和移出。⑨检查制动盘,并检查是否损坏或有裂纹。向下转动制动钳时,确保活塞护套已就位,以免损坏制动摩擦片。......
2023-09-17

工作制动器也称主制动器,是自动扶梯正常制停时使用的制动器。工作制动器在动作过程中应无故意的延迟现象。制动器的制动力必须由有导向的压缩弹簧或重锤来产生。这种制动器也称为机电式制动器。自动扶梯的工作制动器常使用块式制动器、带式制动器或盘式制动器等。所谓常闭式制动器在不工作期间是闭合的,也就是处于制动状态。......
2023-06-15

相关推荐