可以想象,矢量控制交流变压变频调速系统的动、静态特性完全能够与直流调速系统相媲美。若选择转子磁链Ψ2矢量方向为M轴方向,就有下列矢量控制的基本方程式成立图7-5异步电动机矢量变换控制系统图式中:T2=Llr/Rr为转子励磁时间常数。此外,它必须直接或间接地得到转子磁链在空间上的位置,才能实现定子电流解耦控制,因此,在这种矢量控制系统中需要配置转子位置或速度传感器,这也给许多应用场合带来不便。......
2023-06-25
矢量控制(VC)变频调速的做法是将异步电动机在三相坐标系下的定子电流iA、iB、iC通过三相/二相变换,等效成两相静止坐标系下的交流电流iα与iβ,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流im、it(im相当于直流电动机的励磁电流;it相当于与转矩成正比的电枢电流),把上述等效关系用结构图的形式表示出来,如图2-8所示。从整体上看,输入为A、B、C三相电压,输出为转速ω,是一台异步电动机。从内部看,经过3/2变换和同步旋转变换,变成一台由im和it输入、由ω输出的直流电动机。
既然异步电动机经过坐标变换可以等效成直流电动机,那么,模仿直流电动机的控制策略,得到直流电动机的控制量,经过相应的坐标反变换,就能够控制异步电动机了。
由于进行坐标变换的是电流(代表磁动势)的空间矢量,所以这样通过坐标变换实现的控制系统就叫做矢量控制系统(Vector Control System,VCS),控制系统的原理结构图如图2-9所示。
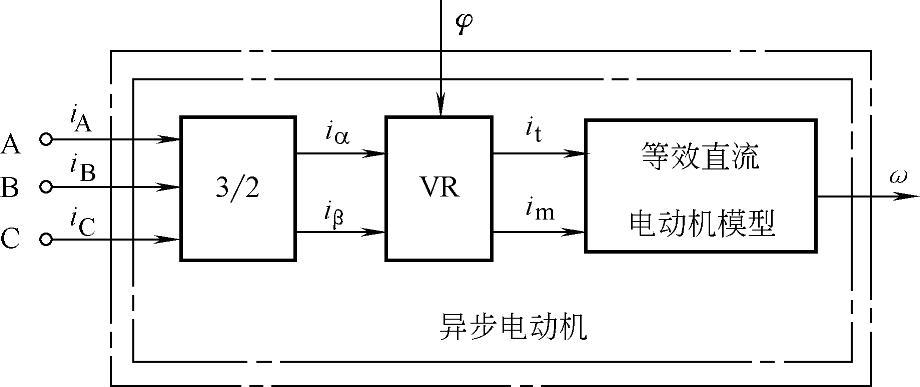
图2-8 异步电动机的坐标变换结构图

图2-9 矢量控制系统原理结构图
反馈信号可以分为电流反馈和速度反馈。电流反馈用于反映负载的情况,使直流信号中与转矩对应的分量It能够随着负载变化,从而模拟出类似于直流电动机的工作状态。速度反馈反映实际转速与给定值之间的差异,并且以最快的响应速度进行校正,提高系统的动态性能。式(2-38)和式(2-39)构成矢量控制基本方程式,定子电流解耦成ism和ist两个分量,ist为励磁电流分量,ψr为转子磁链。

在磁链闭环控制的矢量控制系统中,转子磁链反馈信号是由磁链模型获得的,其幅值和相位都受到电动机参数时间常数Tr和电感Lm变化的影响,造成控制的不准确性。
鉴于此,很多人认为,与其采用磁链闭环控制而反馈不准,不如采用磁链开环控制,系统反而会简单一些。在这种情况下,常利用矢量控制方程中的转差公式,构成转差型的矢量控制系统,又称间接矢量控制系统。
矢量控制的实质是将交流电动机等效为直流电动机,分别对速度和磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标变换,实现正交或解耦控制。
有关西门子系列变频器及其工程应用的文章

可以想象,矢量控制交流变压变频调速系统的动、静态特性完全能够与直流调速系统相媲美。若选择转子磁链Ψ2矢量方向为M轴方向,就有下列矢量控制的基本方程式成立图7-5异步电动机矢量变换控制系统图式中:T2=Llr/Rr为转子励磁时间常数。此外,它必须直接或间接地得到转子磁链在空间上的位置,才能实现定子电流解耦控制,因此,在这种矢量控制系统中需要配置转子位置或速度传感器,这也给许多应用场合带来不便。......
2023-06-25

欲使异步电动机控制系统解耦,关键是要找出两个分别决定磁通和电磁转矩的独立控制量,而且必须求出这两个控制量和能直接测量及控制的定子坐标变量的关系。联邦德国Blaschke等学者在1971年提出的磁场定向型矢量变换控制首先实现了这种控制思想,应用这种矢量变换控制构成了一个磁通反馈的变频调速系统。......
2023-06-25

图8-20 弧柱中气流场与电磁场之间的相互作用过程为了简化开关电弧中的复杂物理化学过程,忽略电弧与电极之间的相互作用,而仅对与电弧特性及开断性能关系更为密切的弧柱部分进行分析。基于以上的假设,可以用Navier-Stokes控制方程来描述电弧等离子体运动的质量、动量及能量守恒过程,用Maxwell方程来描述其中的电磁过程。值得指出的是,空气开关电弧是电磁场和气流场耦合作用下的物理系统,因此上述磁流体动力学基本方程组必须同步耦合求解。......
2023-06-15

式即为动态分析中实际求解的有限元代数方程组。由于式考虑了渗透张量与应力的耦合关系,即使采用弹性本构模型,式也是一个非线性方程组,仍需在每一个计算时步内迭代求解。当然与式相比,式消除了自由面边界非线性的影响,非线性仅来源于随应力的变化,非线性程度减弱了,因此数值分析的计算量也减小了,收敛性也可以保证。......
2023-06-28

平面一般力系平衡的充分与必要条件是:力系的主矢和主矩同时为零。上式称为平面一般力系的平衡方程,平面一般的平衡方程有三个,可求解最多三个未知量。显然各力作用线在同一平面内且任意分布,属于平面一般力系。列平衡方程要根据物体所受的力系类型列出。比如,平面任意力系只能列出三个独立的平衡方程,平面汇交力系或平面平行力系只能列两个;平面力偶系只能列一个;对于由n 个物体组成的系统,可列出3n 个。......
2023-06-19

转矩大小是通过插入零矢量控制的,插入零矢量使定子磁链停止旋转,转矩角θ减小,转矩下降。在电动机正转,转矩Te≠Te时,转矩偏差ΔTe经两点式控制器判定输出WU的状态。在滞环内,当ΔTe从T时,,增加转矩,不插入零矢量;当ΔTe从时,,插入零矢量,减小转矩。在反转的情况,因为Te和Te的极性改变,转向与的关系见表5.3。......
2023-06-19


相关推荐