电压和电流对称分量经变压器后,可能要发生相位移动,这取决于变压器绕组的连接组别。如果变压器接成YN,yn0,而又存在零序电流的通路时,则变压器两侧的零序电流亦是同相位的。这个原则称为Y/Δ接法变压器的负序分量变号原则。试计算变压器Δ侧的各相电压和各相电流。......
2025-09-29
在得到异步电动机的动态数学模型后,要分析和求解这组非线性方程显然是十分困难的。在实际应用中必须设法予以简化,要简化数学模型,须从简化磁链关系入手,简化的基本方法是坐标变换。
坐标变换的思路是,将交流电动机的物理模型(见图2-2)等效地变换成类似直流电动机的模式,这样分析和控制就可以大大简化。不同电动机模型彼此等效的原则是:在不同坐标下所产生的磁动势完全一致。
根据电机学知识,交流电动机三相对称的静止绕组A、B、C,通以三相平衡的正弦电流时,所产生的合成磁动势是旋转磁动势F,它在空间呈正弦分布,以同步转速ω1(即电流的角频率)顺着A-B-C的相序旋转,如图2-2所示。
然而,旋转磁动势并不一定非要三相不可,除单相以外,二相、三相、四相等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。
图2-3中绘出了两相静止绕组α和β,它们在空间互差90°,通以时间上互差90°的两相平衡交流电流,也产生旋转磁动势F。
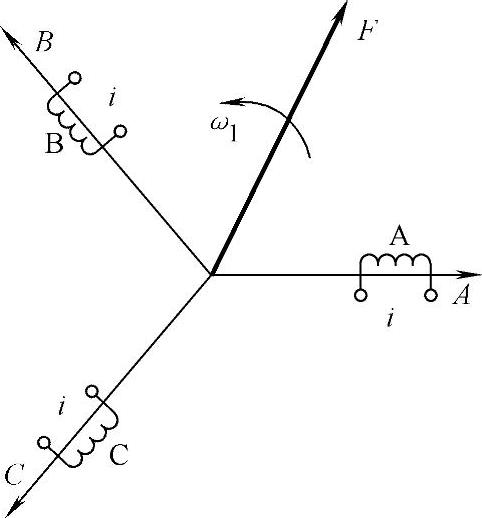
图2-2 三相交流绕组
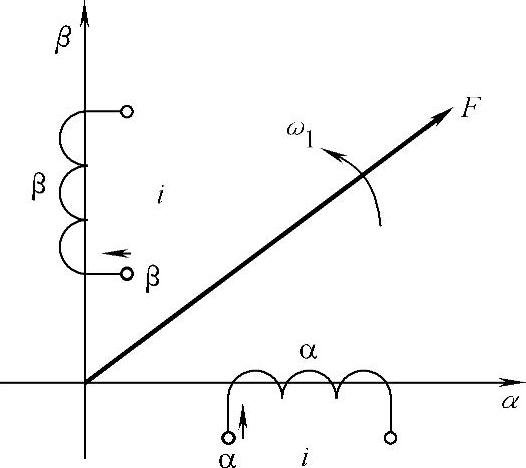
图2-3 两相交流绕组
当图2-2和图2-3中的两个旋转磁动势大小和转速都相等时,即认为图2-3的两相绕组与图2-2的三相绕组等效。
在图2-4中,两个匝数相等且互相垂直的绕组M和T,其中分别通以直流电流im和it,产生合成磁动势F,其位置相对于绕组来说是固定的。
让包含两个绕组在内的整个铁心以同步转速旋转,则磁动势F自然也随之旋转起来,成为旋转磁动势。如果这个旋转磁动势的大小和转速也控制成与图2-2和图2-3中的磁动势一样,那么这套旋转的直流绕组也就和前面两套固定的交流绕组都等效了。当观察者也站到铁心上绕组一起旋转时,M和T就是两个通以直流而相互垂直的静止绕组。
如果控制磁通的位置在M轴上,就和直流电动机物理模型没有本质上的区别了。这时,绕组M相当于励磁绕组,T相当于伪静止的电枢绕组。(https://www.chuimin.cn)
由此可见,以产生同样的旋转磁动势为准则,图2-2的三相交流绕组、图2-3的两相交流绕组和图2-4中整体旋转的直流绕组彼此等效。或者说,在三相坐标系下的iA、iB、iC,在两相坐标系下的iα、iβ和在旋转两相坐标系下的直流im、it是等效的,它们能产生相同的旋转磁动势。利用坐标变换就可以求出iA、iB、iC与iα、iβ和im、it之间准确的等效关系。
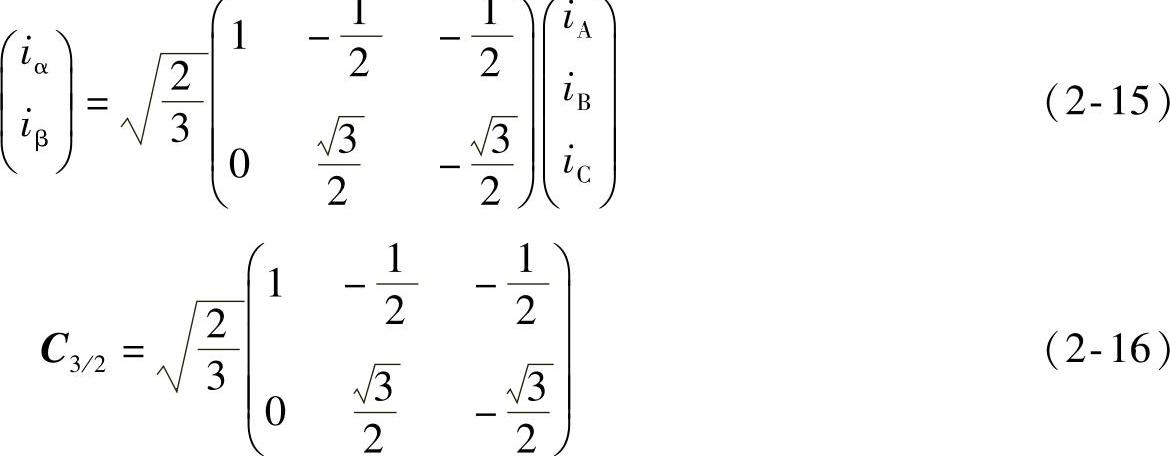
在三相静止绕组A、B、C和两相静止绕组α、β之间的变换,称三相静止坐标系和两相静止坐标系间的变换,简称3/2变换。为方便起见,取A轴和α轴重合。设三相绕组每相有效匝数为N3,两相绕组每相有效匝数为N2,各相磁动势为有效匝数与电流的乘积,其空间矢量均位于有关相的坐标轴上。考虑变换前后总功率不变,在此前提下,可以证明,匝数比应为N3/N2=2/3。iA、iB、iC与iα、iβ之间的等效关系如式(2-15)。从三相坐标系变换到两相坐标系的变换矩阵C3/2,如式(2-16)。
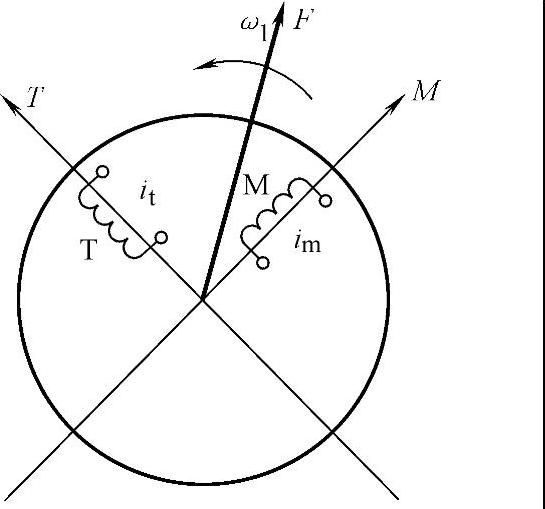
图2-4 旋转的直流绕组
按照所采用的条件,电流变换矩阵也就是电压变换矩阵,也是磁链的变换矩阵。
如果三相绕组是 联结不带零线,则有iA+iB+iC=0,或iC=-iA-iB。代入式(2-15),并整理后得式(2-17)
联结不带零线,则有iA+iB+iC=0,或iC=-iA-iB。代入式(2-15),并整理后得式(2-17)

在等效的交流电动机绕组和直流电动机绕组物理模型的图2-3和图2-4中,从两相静止坐标系到两相旋转坐标系M、T变换称作两相-两相旋转变换,简称2s/2r变换,其中s表示静止,r表示旋转。把两个坐标系画在一起,即得图2-5。图2-5中,两相交流电流iα、iβ和两个直流电流im、it产生同样的以同步转速ω1旋转的合成磁动势Fs。由于各绕组匝数都相等,可以消去磁动势中的匝数,直接用电流表示,例如Fs可以直接标成is。但必须注意,这里的电流都是空间矢量,而不是时间向量。
M、T轴和矢量Fs(is)都以转速ω1旋转,分量im、it的长短不变,相当于M、T绕组的直流磁动势。由于α、β轴是静止的,α轴与M轴的夹角φ随时间而变化,因此is在α、β轴上的分量的长短也随时间变化,相当于绕组交流磁动势的瞬时值。由图可见iα、iβ和im、it之间存在关系如式(2-18),C2r/2s是两相旋转坐标系变换到两相静止坐标系的变换阵。

经过坐标变换简化了电动机的数学模型,把电动机变换到两相坐标系上,由于两相坐标轴互相垂直,两相绕组之间没有磁的耦合,使数学模型简单了许多。
相关文章

电压和电流对称分量经变压器后,可能要发生相位移动,这取决于变压器绕组的连接组别。如果变压器接成YN,yn0,而又存在零序电流的通路时,则变压器两侧的零序电流亦是同相位的。这个原则称为Y/Δ接法变压器的负序分量变号原则。试计算变压器Δ侧的各相电压和各相电流。......
2025-09-29

用节电导纳矩阵描述的节点电压方程是依靠节点导纳矩阵来建立节点电流与节点电压之间关系的,因此须先确定节点导纳矩阵。在复杂电力网中,这种情况较多,从而使矩阵中出现大量的零元素,节点导纳矩阵成为稀疏矩阵。因此,节点导纳矩阵是一个对称、稀疏且具有对角线优势的方阵。......
2025-09-29
变频器按变换环节可以分为交-交变频器和交-直-交变频器。交-交变频把频率固定的交流电源直接变换成频率连续可调的交流电源。而直接中压变频方式,因没有中间的低压环节,结构上有着广阔的发展前景。把直流电逆变成交流电的环节较易控制,在频率的调节范围,以及改善变频后电动机的特性等方面,都具有明显的优势。由于其存在着中间低压环节,所以具有电流大、结构复杂、效率低、可靠性差等缺点。......
2025-09-29

课程体系建立后,需要对各门课程的能力素质达成情况进行考查。将课程i的j目标的达成度记为Ti,j,则该课程对专业能力素质培养的总达成度为所有课程对第j项能力素质目标的总达成度为式中,K为开设课程的数量。专业能力素质达成度Q表示为或表示为上述两式具有不同的含义。专业开设的课程和能力素质目标共同构成了专业能力素质达成矩阵,即表3-1所示为其表格形式。......
2025-09-29

在建立课程目标矩阵中,要充分考虑到大学阶段学习的所有必修课程,包括通识教育课程、基础教育课程、实践教学环节等。表4-4课程目标矩阵(一)续表在实施过程中,通常还有两种操作方式。对于每一门课程来说,其在支撑毕业要求指标观测点时重要性是不一样的,因此该课程支撑的所有指标点的权重系数之和应该在0~1。表4-6课程目标矩阵(三)......
2025-09-29

图2.4.1所示的“创建几何体”对话框中的各选项说明如下。图2.4.3 “CSYS”对话框图2.4.4 创建坐标系Step5.单击“CSYS”对话框区域中的“操控器”按钮,系统弹出图2.4.5所示的“点”对话框,在Z文本框中输入值10.0,单击按钮,此时系统返回至“CSYS”对话框,单击按钮,完成图2.4.6所示的机床坐标系的创建,系统返回到“MCS”对话框。图2.4.5 “点”对话框图2.4.6 机床坐标系......
2025-09-29

课程i中教学手段m 对能力素质目标j的达成度为tmj,。在设计课程进程时,要合理分配理论教学、实践教学及考核方式等教学方式,实现达成度的最大化。......
2025-09-29

Stage1.创建机床坐标系在工序导航器中调整到几何视图状态,双击节点,系统弹出“MCS线切割”对话框。Stage2.创建几何体Step1.在工序导航器中选中节点并右击鼠标,在系统弹出的快捷菜单中选择命令,系统弹出如图8.3.2所示的“创建工序”对话框。图8.3.1 创建坐标系图8.3.2 “创建工序”对话框Step2.在下拉列表中选择选项,在区域中单击EXTERNAL_TRIM按钮,在下拉列表中选择选项,在下拉列表中选择选项,在下拉列表中选择选项,在下拉列表中选择选项,在文本框中输入EXTERNAL_TRIM。......
2025-09-29
相关推荐