图8-12 SMCB工作原理图正常工作时,由于辅助电流回路限流电阻的存在,负载电流主要通过主电流回路;短路开断过程中,其限流性能主要是通过主动触头的快速打开后电流迅速向辅助回路转移,并依靠限流电阻的作用来实现。而当短路发生在SMCB和下级MCB之间时,主回路和辅助回路的双金属片均可能在短延时后动作,从而使机构解锁并实现短路分断。......
2025-09-29
在用户计算机上首先安装STEP75.x软件和CP34x模板所带的软件驱动程序,模板驱动程序包括了对CP341进行参数化的窗口(在STEP7的硬件组态界面下可以打开)、用于串行通信的FB程序块、模板不同应用方式的例子程序。
当系统上电,CP34x模板初始化完成后,CP34x上的SF灯点亮。
1.参数化CP34x模板
在硬件组态窗口中双击CP34x模板,打开CP34x模板的属性窗口,请记下模板的硬件地址,如图12-3所示。
在编写通信程序时,用户需要该地址参数,同时可以用鼠标左键单击属性窗口上的“Parameters(参数)”按钮。
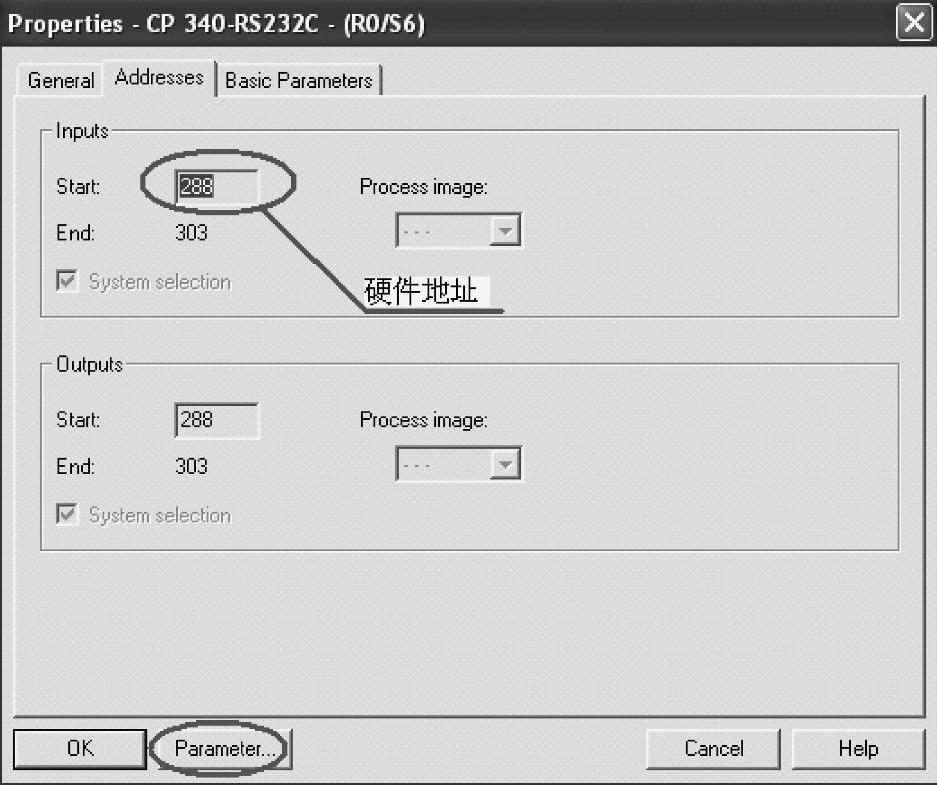
图12-3 硬件地址
选择所要使用的通信协议,这里我们选用ASCII协议,双击信封图标,如图12-4所示。
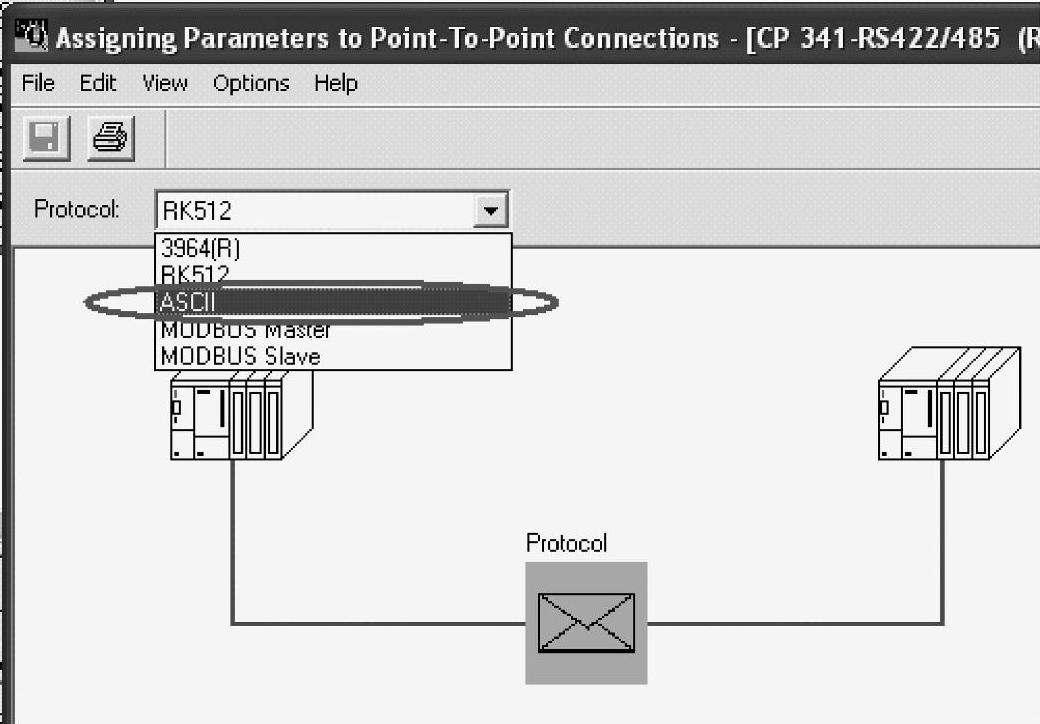
图12-4 选择所要使用的通信协议
如图12-5所示,弹出ASCII协议通信参数设置窗口,这里我们使用默认值:9600 bit/s,8 Data Bits,1 Stop Bits,Even Parity。
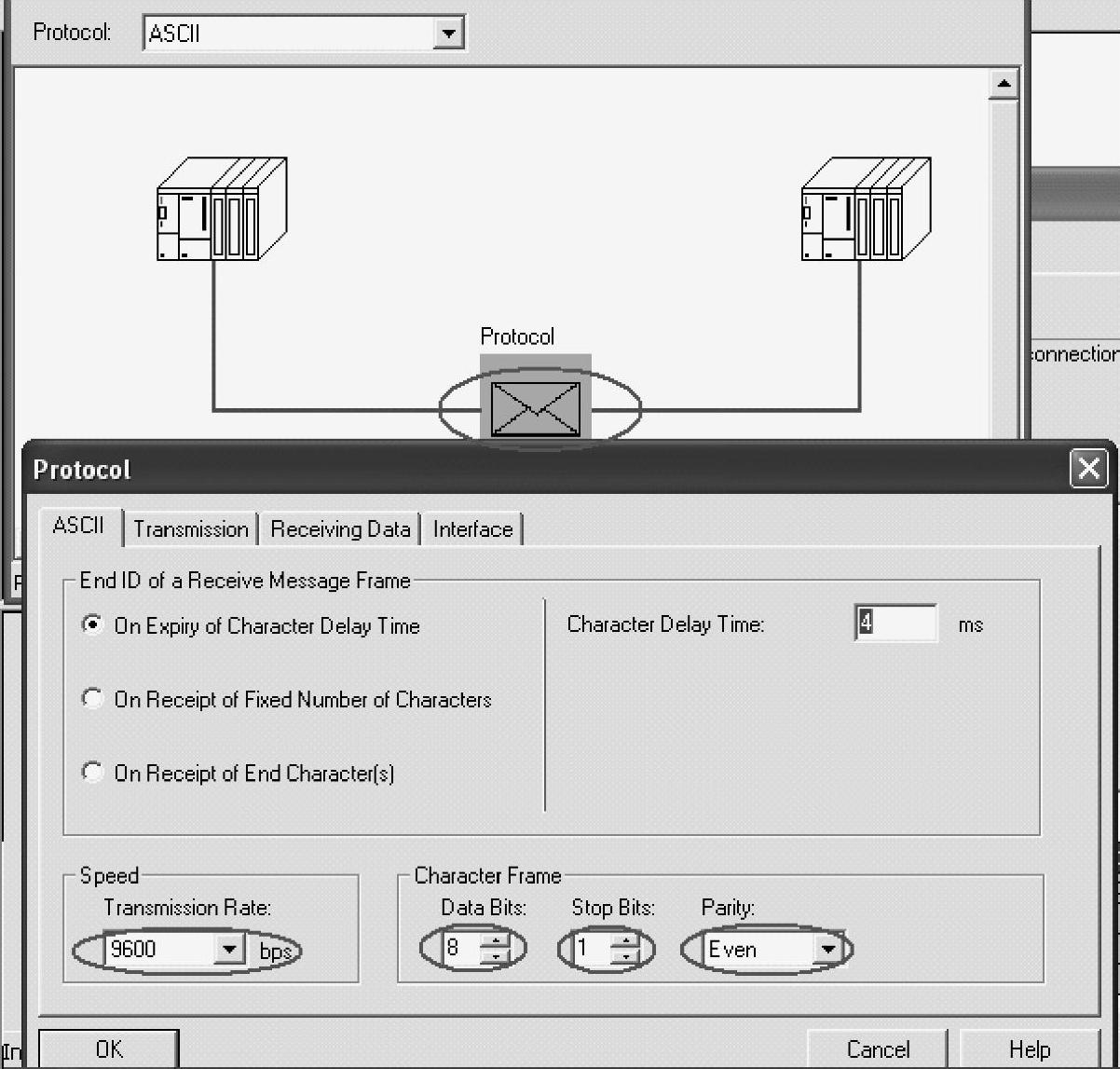
图12-5 ASCII协议通信参数设置窗口
对硬件组态存盘编译,下载硬件组态,如果此时SF灯亮,请将通信电缆与另一个通信伙伴进行连接后,SF灯熄灭,说明硬件组态正确。
2.编写通信程序
在安装完CP34x/CP44x的驱动程序,MODBUS主站软件,MODBUS从站软件等3个软件后,用户可以在目录….\Siemens\STEP7\Examples当中找到关于CP34x/CP44x的串口通信和Modbus通信的例子程序,通过在STEP7软件的SIMATIC Manager下打开例子程序,如图12-6所示。
用户可以使用CP341串口例子程序中3964(R)站中的程序块实现ASCII通信协议。
打开CPU下的Blocks文件夹,复制所有的程序块(除system data以外)到你的项目当中,只要作一些简单的参数修改,就可以实现相应的通信了,如果用户的CP34x的硬件地址与例子程序当中的不同,那么应当修改相应程序块LADDR参数,CP34x/CP44x模块实际的硬件组态地址值相同,修改后,下载程序块,将CPU切换至运行状态,CP34x开始循环发送数据,可以看到“TxD”灯闪烁。
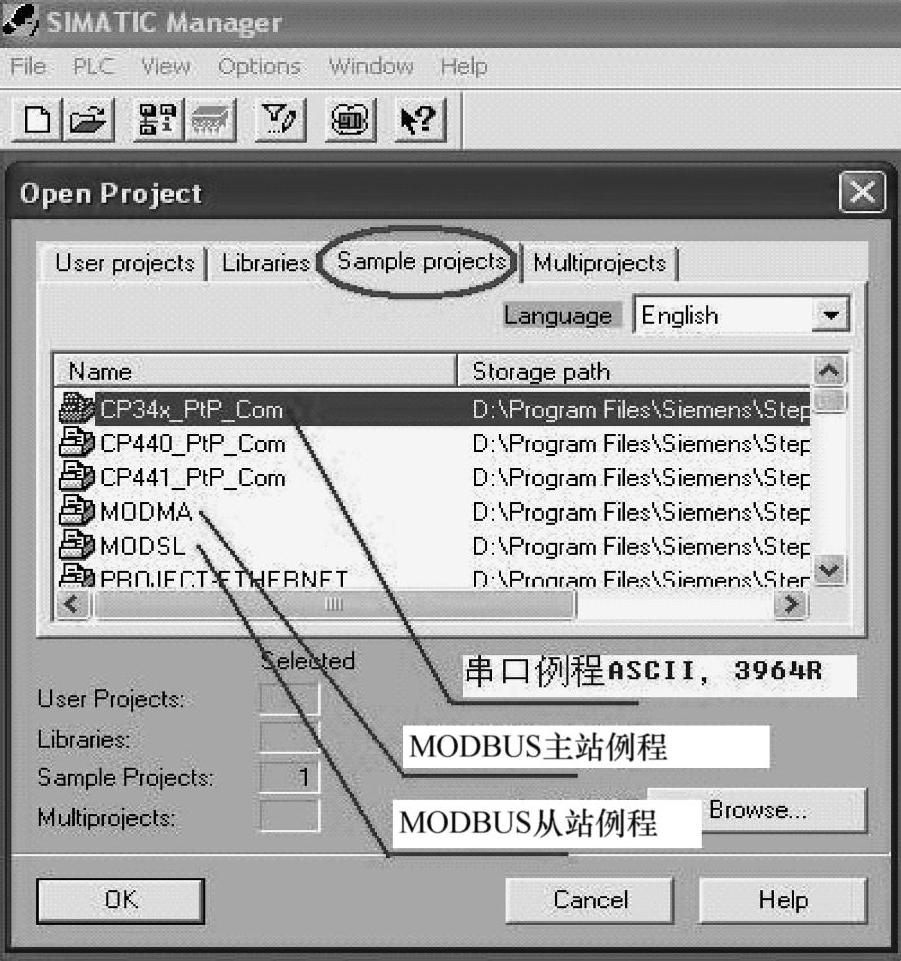
图12-6 例子程序
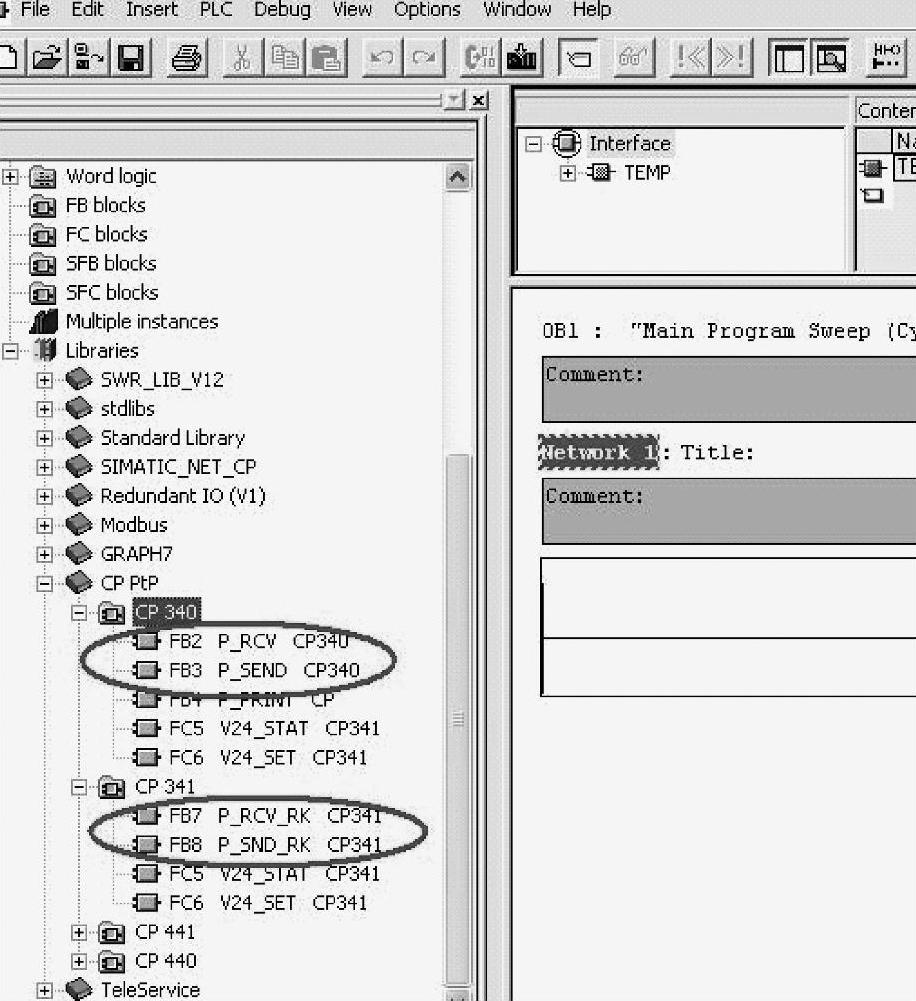
图12-7 模块的字符收发功能
调用FB7/FB8(CP341)或FB2/FB3(CP340)实现模块的字符收发功能,如图12-7所示。
显示了调用FB7/FB8实现通信功能,在线监视的状态,如图12-8所示。
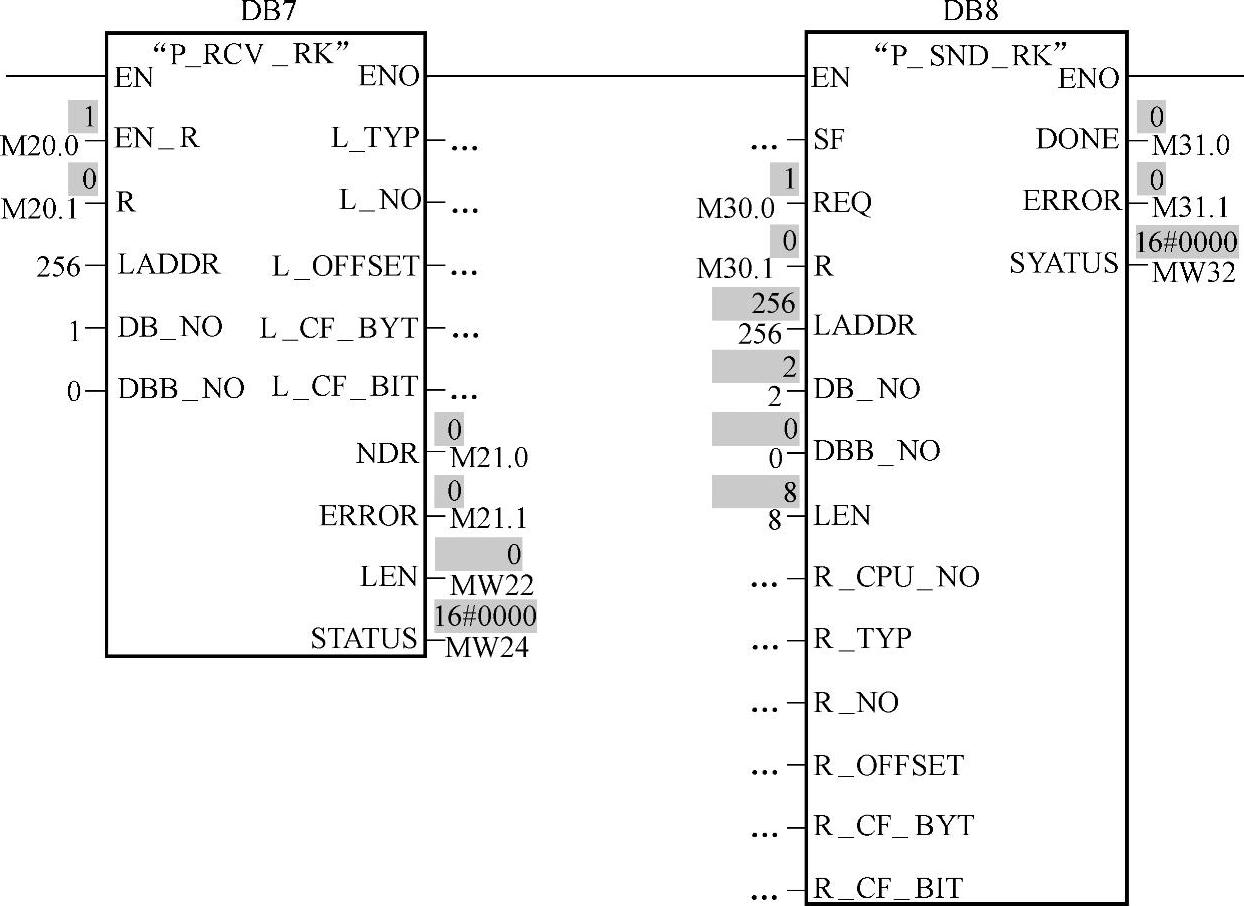
图12-8 调用FB7/FB8实现通信功能
注意,这里一定要将M20.0和M30.0使能位置1,同时在用户的程序中插入接收数据区DB1和发送数据区DB2。
3.串口通信调试软件(超级终端)
调试CP34x的一个基本方法是采用PC上的串口通信调试软件,Windows系统自带的超级终端(Hyper Terminal)软件是一个非常方便的串口调试工具,用电缆将CP34x的通信口和PC的COM口(RS232C)连接起来,如果用户采用的是485/422或TYY接口的模块,那还需在中间加一个RS485—RS232或TYY—RS232信号转换器,打开超级终端的路径如图12-9所示。(https://www.chuimin.cn)
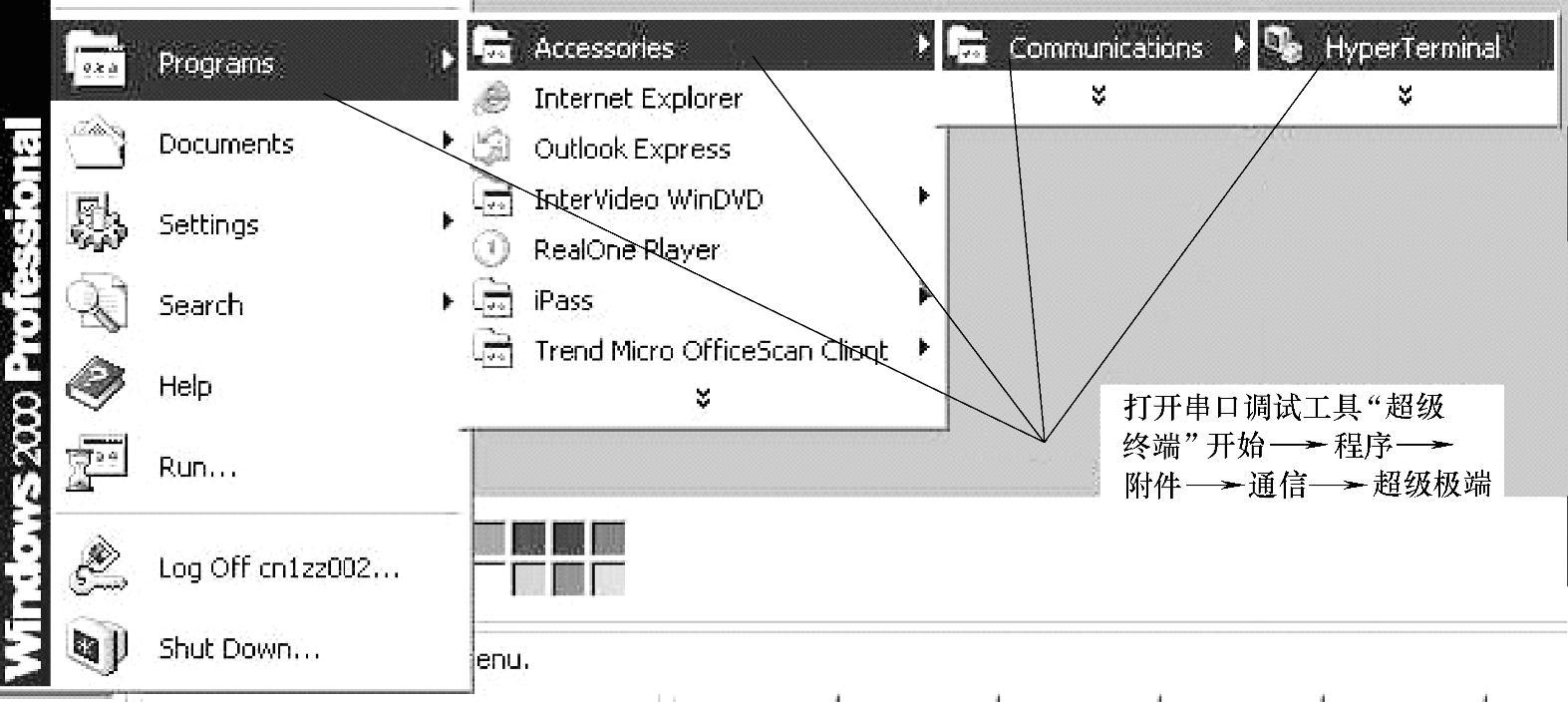
图12-9 超级终端
打开超级终端软件后,定义连接的名称,确定通信端口以及串口通信的属性(波特率、数据位个数、校验类型、流控类型等),界面如图12-10所示。
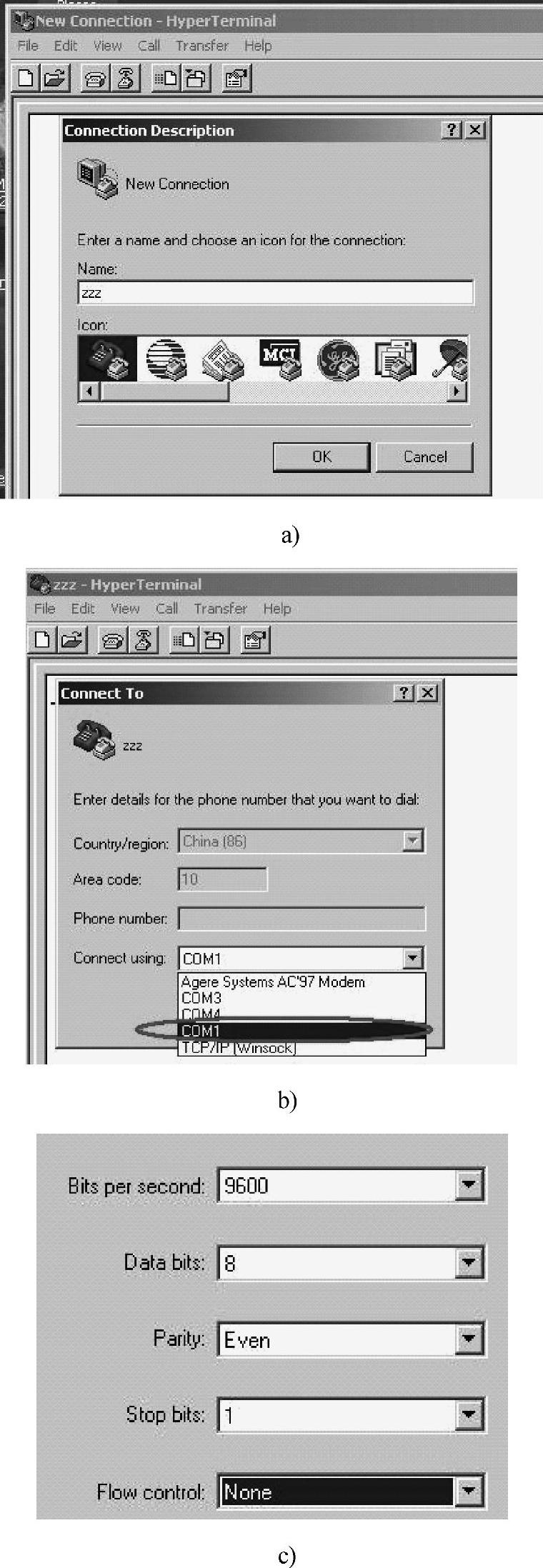
图12-10 超级终端的使用
a)新建一个连接 b)设置连接方式 c)设置连接通信协议
图12-10 超级终端的使用(续)
d)输入通信内容
这里需要注意,如果是用的是其他COM口,请根据实际连接的COM口进行选择,波特率、数据位,奇偶校验位,停止位,流控要与CP34x/CP44x组态时设定的值一致,起始位为1位,停止位可设定为1位。
4.MODBUS从站调试
首先需要在CP模块上插入MODBUS从站Dongle,如图12-11所示,然后安装MODBUS从站软件包,可以在下面的下载路径中获得,安装完软件包后,在项目中组态MODBUS从站,双击CP341模块,在模块的属性窗口中单击“Parameter”按钮,选择Modbus从站协议,如图12-11所示。
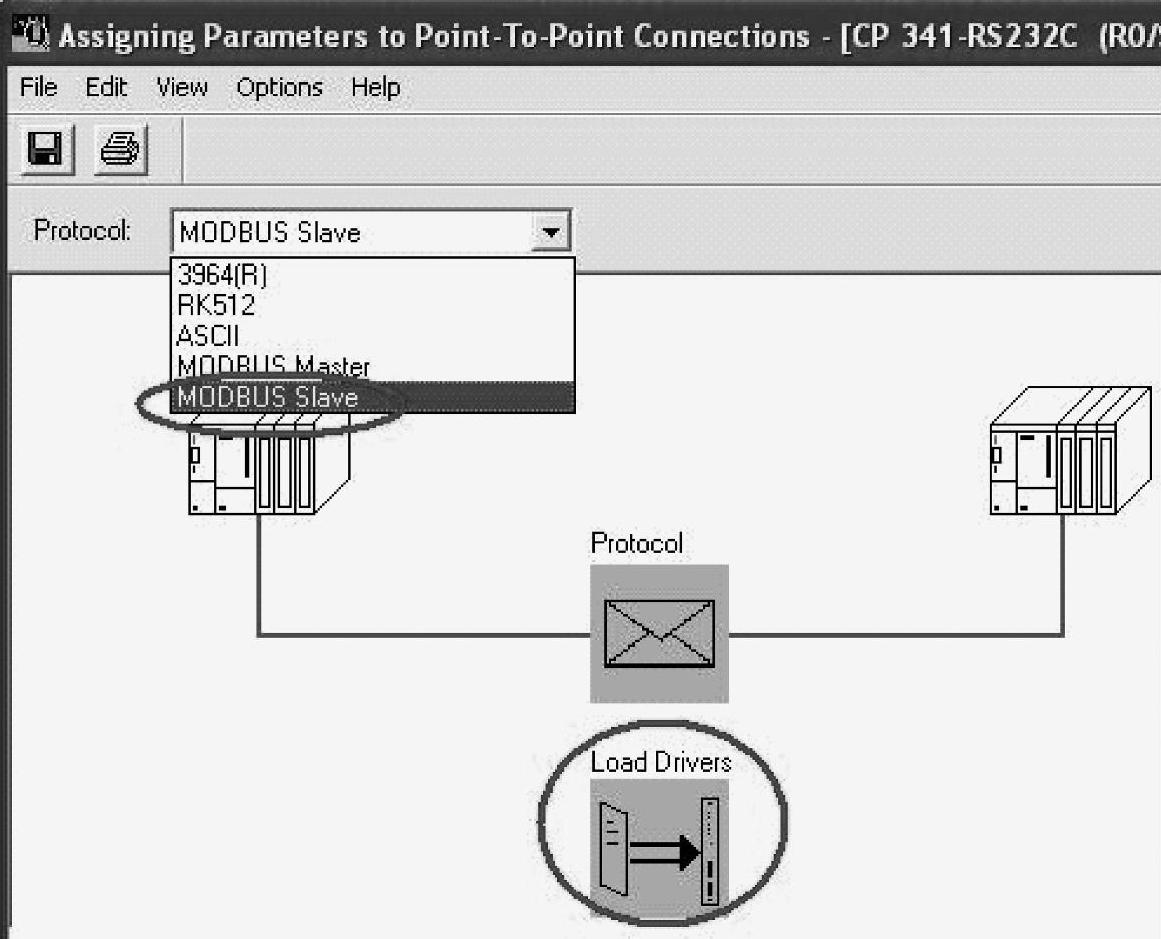
图12-11 选择MODBUS从站协议
将用户的PC和PLC连接起来,PLC上电,单击Load Drivers图标,弹出装载驱动窗口,如图12-12所示。
用鼠标单击“Load Drivers”按钮,完成从站驱动安装过程,进行MODBUS驱动装载的时候,PLC必须处于STOP状态。在点击信封图标,打开MODBUS从站参数窗口,如图12-13所示。
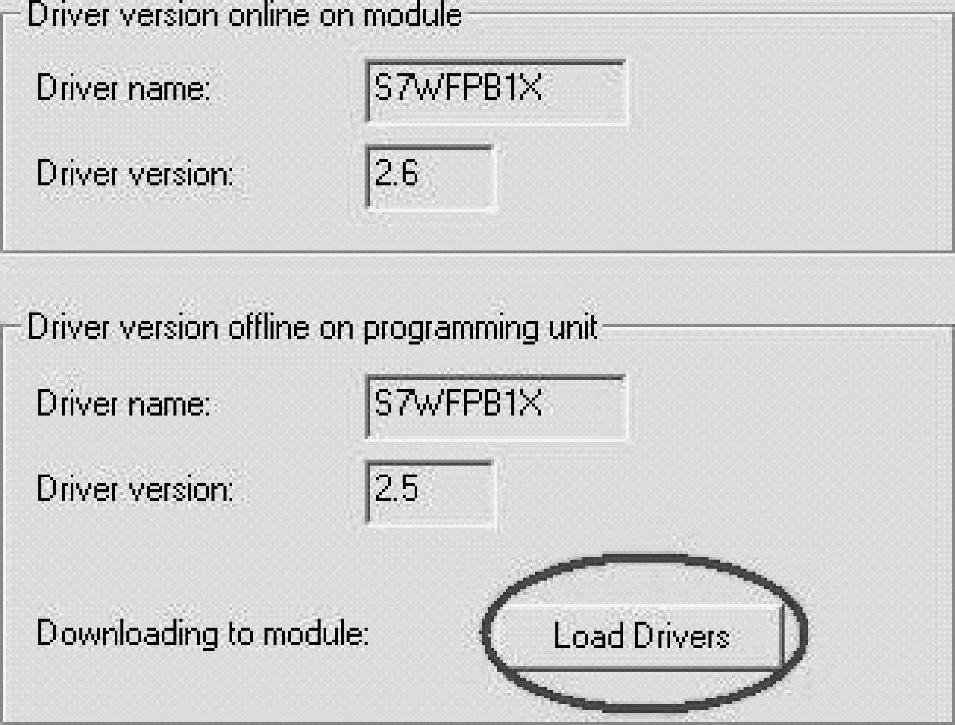
图12-12 装载驱动窗口
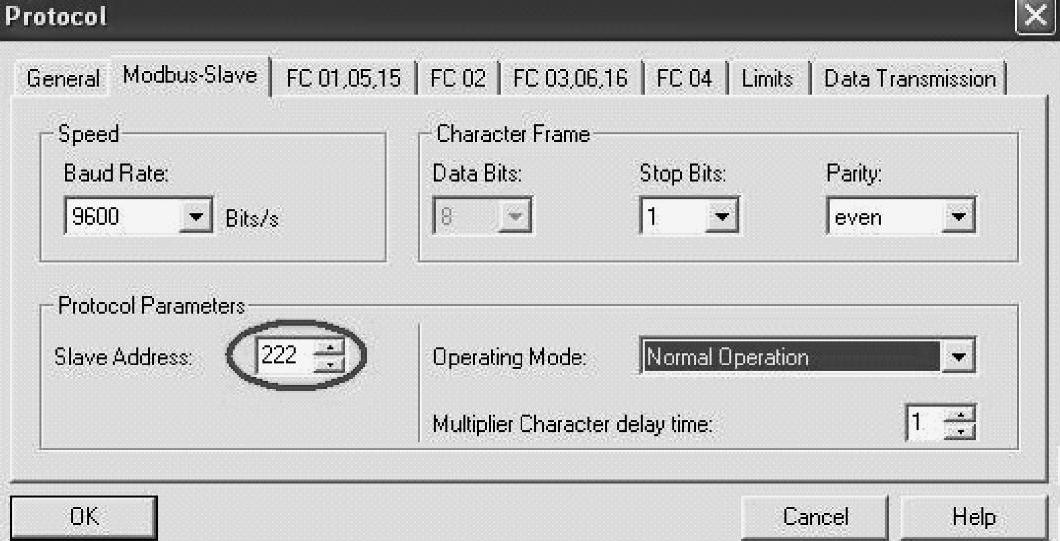
图12-13 MODBUS从站参数窗口
默认从站地址222,然后在设定MODBUS从站的Function Code地址与PLC中M、I、Q等地址的对应关系,如图12-14所示。
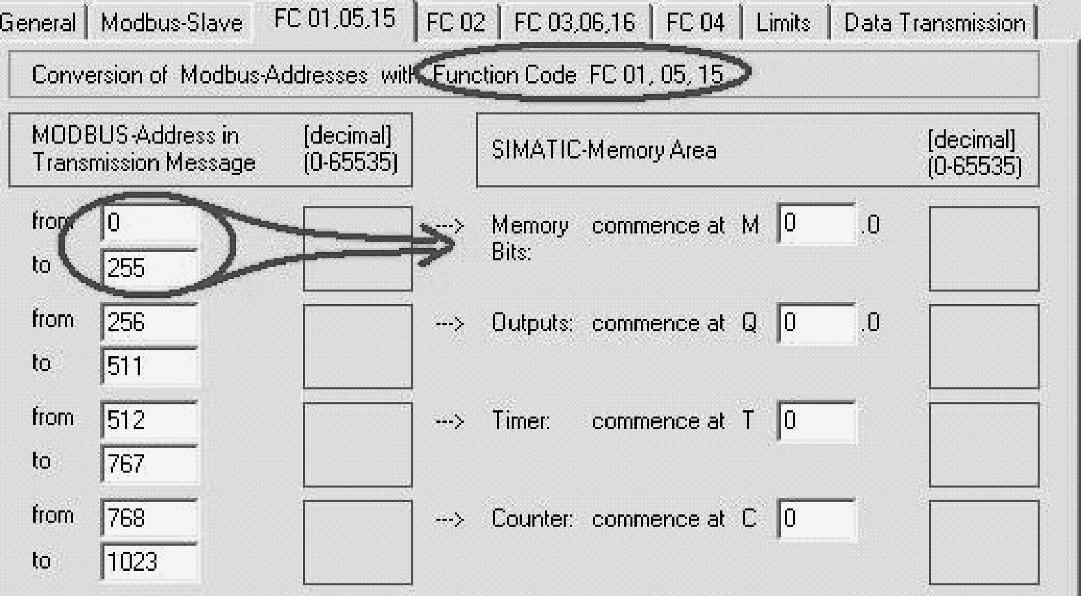
图12-14 设定MODBUS从站的相关数据
以上所设定的参数含义是MODBUS主站读从站的前256个位(00001-00256)对应S7-300站中MB0-MB31中的数据,主站读从站第257个到512个位对应QB0-QB31。
Function Code 01,05,15对应M,Q,T,C等数据区,可读可写,具体的字节范围在MODBUS从站组态时设定。
Function Code 02对应M,I数据区,只读,具体的字节范围在MODBUS从站组态时设定。
Function Code 03,06,16对应DB区,可读可写,在MODBUS从站组态时设定对应的DB块。
Function Code 04对应DB区,只读,在MODBUS从站组态时设定对应的DB块。
相关文章

图8-12 SMCB工作原理图正常工作时,由于辅助电流回路限流电阻的存在,负载电流主要通过主电流回路;短路开断过程中,其限流性能主要是通过主动触头的快速打开后电流迅速向辅助回路转移,并依靠限流电阻的作用来实现。而当短路发生在SMCB和下级MCB之间时,主回路和辅助回路的双金属片均可能在短延时后动作,从而使机构解锁并实现短路分断。......
2025-09-29
由于过程能力仅表示生产过程中质量数据的分散程度,不能反映该过程是否能够满足产品的技术质量要求,因此引入过程能力指数Cp。表4-6 过程能力指数分级与判断以涂层结合强度为例,对等离子喷涂生产过程的过程能力指数进行分析。......
2025-09-29

PLC的用户程序执行过程很复杂,下面以PLC正转控制线路为例进行说明。图5-5 PLC正转控制线路用户程序执行过程说明如下:当按下起动按钮SB1时,输入继电器X000线圈得电,它使用户程序中的X000常开触头闭合,输出继电器Y000线圈得电,它一方面使用户程序中的Y000常开触头闭合,对Y000线圈供电锁定外,另一方面使输出端的Y000常开触头闭合,接触器KM线圈得电,主电路中的KM主触头闭合,电动机得电运转。......
2025-09-29

染料在纤维上的固着是上染的最后阶段,它对染色牢度影响很大。染料在纤维上的固着,主要通过库仑力、范德瓦尔斯力、氢键、共价键、配位键等。因此在染料分子与纤维分子形成氢键的同时,原有的氢键将发生断裂。氢键的能量、作用半径都和范德瓦尔斯力的能量、作用半径属于一个数量级,染料和纤维分子中一般都含有供氢和吸氢基团,因此氢键也普遍存在于各纤维染色体系中。......
2025-09-29

单螺杆挤出机生产操作注意事项1)每次挤出机开车生产前都要仔细检查机筒内和料斗上下有无异物,及时清除一切杂物和油污。双螺杆挤出机生产操作注意事项 双螺杆挤出机的生产操作程序与普通单螺杆挤出机的生产操作程序基本相同。8)双螺杆挤出机的塑化螺杆转动、喂料螺杆的强制加料转动及润滑系统的油泵电动机工作为联锁控制。......
2025-09-29

针对某型固定鸭舵式二维弹道修正智能榴弹, 对固定鸭舵的制动控制是弹道修正的关键技术。结合固定鸭舵的受力和运动特性, 从上述两种控制方案中进行优选。其次, 从固定鸭舵的控制对磁力矩电机提出的要求角度考虑。固定鸭舵滚转一周的时间约为0.033 s, 在如此短的时间内实现多次无偏差速度控制, 对磁力矩电机的响应速度提出了很高的要求, 且由于固定鸭舵飞行环境干扰的复杂性, 控制的精度很难保证。......
2025-09-29
断路器操作机构的疲劳问题主要是由闭合与分断过程中的动态应力应变引起,因此对断路器操作机构疲劳寿命评估的前提是分合闸过程中零部件动态应力应变的准确计算。动态应力应变的计算基于柔性体的瞬态动力学分析,瞬态动力学分析是用于确定结构在承受任意随时间变化的载荷时的动力学响应的一种方法。常用的瞬态动力学求解方法包括:完全法、缩减法、模态叠加法,本章中柔性体应力应变的计算使用模态叠加法。......
2025-09-29
相关推荐