连续控制系统中的PID控制规律为式中 KP——比例系数;TI——积分时间常数;TD——微分时间常数;e——偏差;u——控制量。一个线性连续系统的模拟PID控制系统原理框图如图10-36所示。图10-36 模拟PID控制系统原理框图一个PID调节器的比例系数、积分时间常数和微分时间常数一旦确定,该控制器的性能随之确定。比例控制可以迅速反应误差,并减小稳态误差。积分控制的作用:积分控制可以对系统误差进行积分,输出控制量,以消除误差。......
2023-08-30
1.恒液位控制程序
恒液位控制的软件编程应按表9-3进行。当然,OB35的周期设置可以根据工艺实际要求而定。
表9-3 PID软件编程步骤

为了保证执行频率一致,块应当在循环中断OB(例如OB35)中调用。由于OB1不能保证不变的循环时间,所以不能为“CYCLE”提供明确的参数。一旦“CYCLE”参数不能和扫描时间保持一致,那么基于时间的控制参数(例如TI,TD)会看起来很快或者很慢。
由于SFB41需要背景DB块,因此需要按照图9-3进行设置。

图9-3 设置SFB41的背景DB为DB3
具体的PID调用程序如图9-4所示。

图9-4 PID程序调用
在PID程序调用中,“CYCLE”参数对应的是扫描时间,必须将程序块调用的间隔时间赋值在这里(例如基于OB35的时间)。
默认状态下为手动模式(MAN_ON=true)。当I0.3=1时,自动回路被中断,在MAN参数下输出控制值,如本例中的50%。为了确保手自动的无扰切换,在手动模式下至少保证两次块调用的输出时间。
2.PID控制软件
PID控制软件是配合STEP 7管理器使用的,在本案例中的操作使用步骤如下:
(1)新建或打开现有的数据块
可从CPU在线装载数据块或从PG/PC离线装载数据块,如图9-5所示。
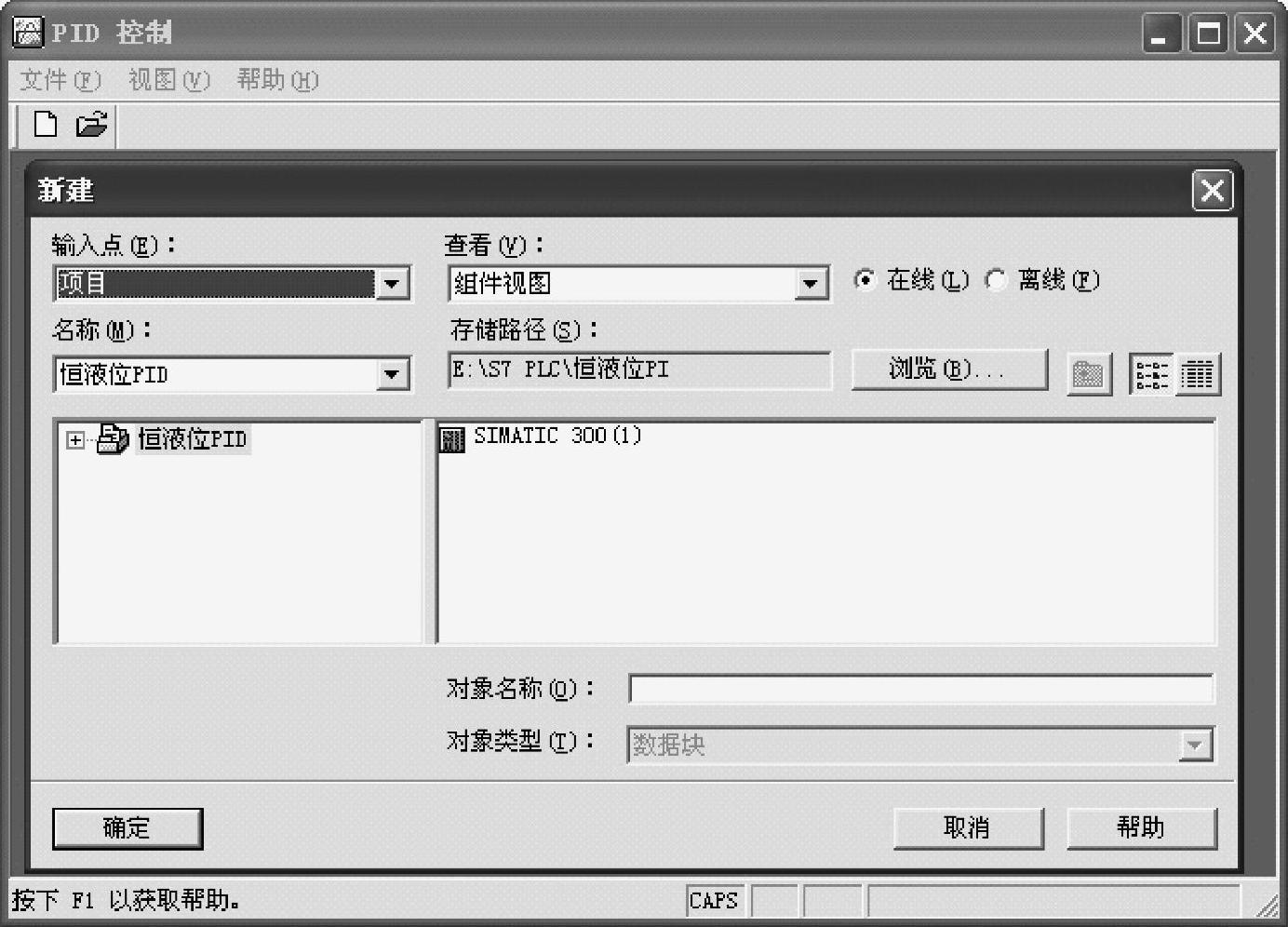
图9-5 新建或打开现有的数据块
(2)在线获取PID参数
无论是手动模式(如图9-6所示)还是自动模式(如图9-7所示),都可以在线获取PID参数,需要注意的是如果PID中的某一个控制没有被激活,如D分量没有激活,其参数值将不被获取。
(3)在线数据运行曲线记录器
要使用在线数据运行曲线记录器,可按如下操作:
1)使用菜单“选项调试”→“曲线记录器”启动此项功能。出现“曲线记录器”窗口,单击“设置...”按钮,跳转到曲线记录器的“设置”对话框。
2)单击方框“曲线1”到“曲线3”中的箭头。出现参数列表,可从中选择要分配给曲线的参数。
3)设置X轴坐标的上限和下限。
4)单击“更改颜色”按钮。“颜色选择”对话框打开。在此,可为曲线分配特定的颜色。
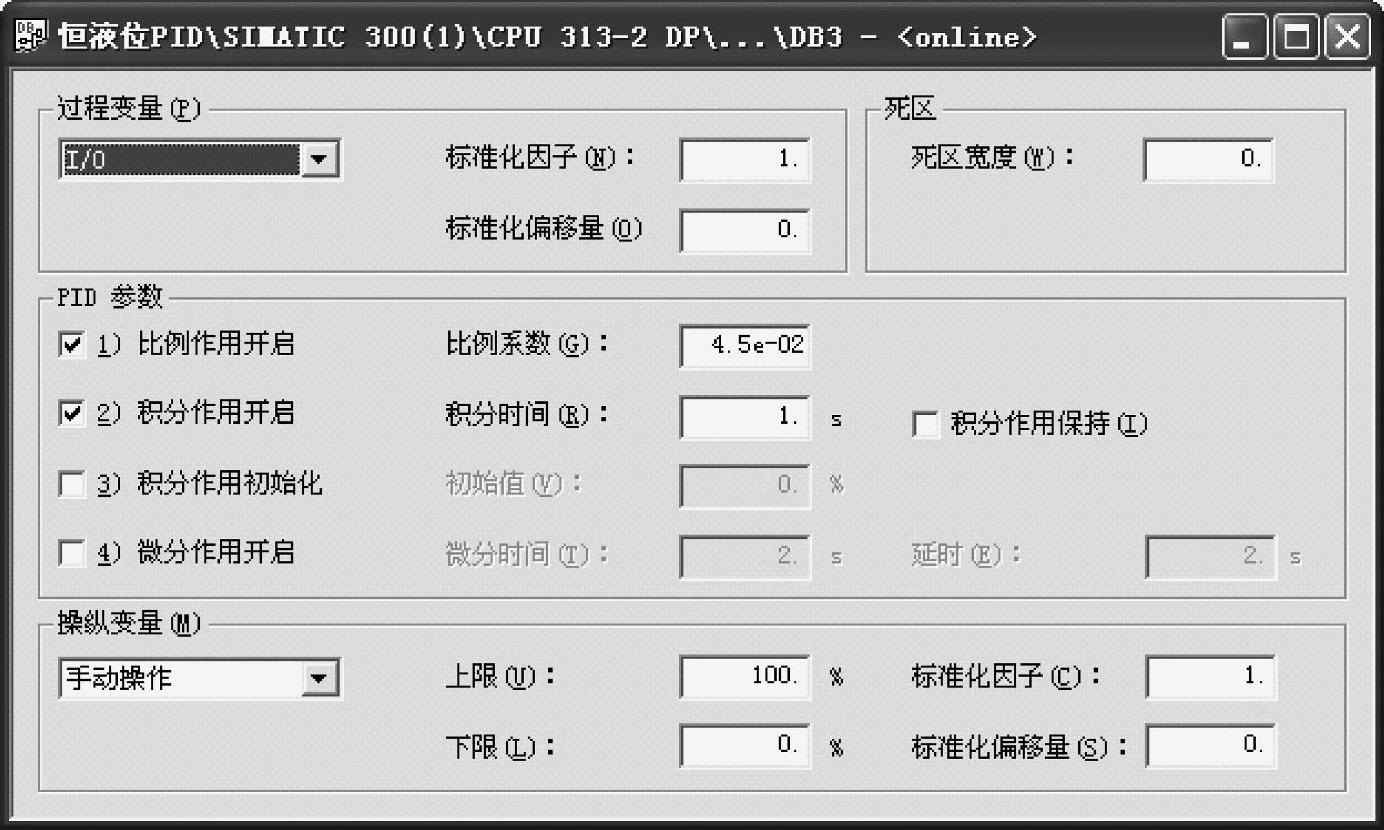
图9-6 手动操作

图9-7 自动操作
5)使用“时间分辨率”框中的箭头为过程动态选择合适的周期(100ms、200ms、...900ms、1s、2s、...9s、10s、20s、90s),来建立采集周期。
6)单击“确定”按钮退出对话框,然后单击“开始”按钮,开始测量值的采集。
7)监视窗口中的记录。您将看到所选参数记录的当前部分。当前值显示在窗口的右上部。
8)要停止记录,单击“停止”按钮。此状态下,可使用曲线窗口下的滚动条将窗口移动到所记录的曲线上。继续记录,再次单击“开始”按钮。
9)单击“关闭”按钮,终止曲线记录器的功能。
如图9-8所示为恒液位控制某一时刻所记录的曲线。
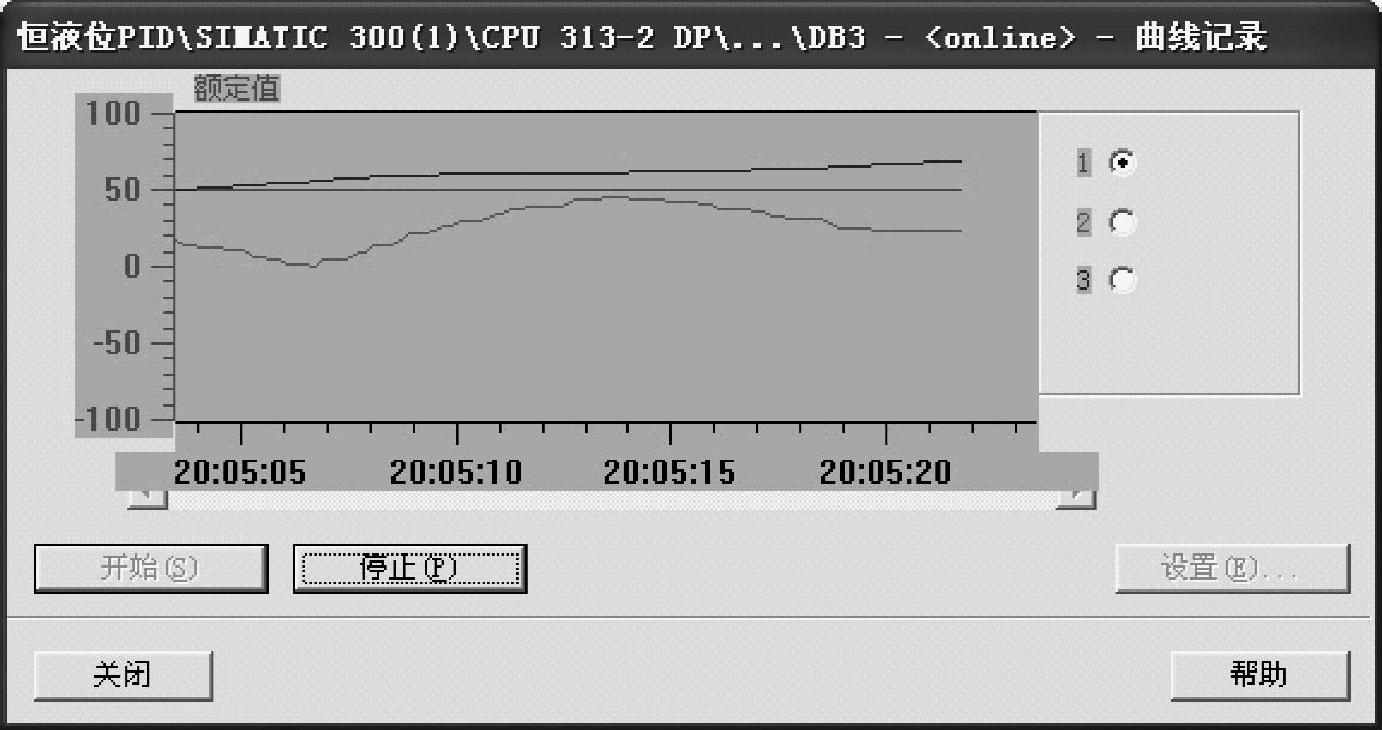
图9-8 在线数据运行曲线记录器
3.PID编程经验技巧
由于PID控制在很大程度上取决于工艺类型,因此应用PID尤其困难,这时候可以采用这里所提的PID编程经验技巧,即大部分参数不要填,默认就行,以下是常用参数,用变量连接:
1)MAN_ON:用一个bool量,如m0.0,为true则手动,为false则自动;
2)cycle:如T#100MS,这个值与ob35默认的一致;
3)SP_INT:如MD2,是操作站发下来的设定值,0~100.0的范围,real型;
4)PV_IN:如md6,实际测量值,比如液位、压力,要从PIW×××转换为0~100.0的量程;
5)MAN:如MD10,op值,也就是手动状态下的阀门输出,real型,0~100.0的范围;
6)GAIN:如md14,Pid的P,默认写1~2(系统默认是2),调试的时候再依实际情况修改;
7)TI:如MW20,pid的i啊.默认写T#30S吧,调试的时候依实际情况修改;
8)DEAD_W:如md22,死区,就是sp和pv的偏差死区,0~100.0的范围,默认0,调试的时候依实际情况修改;
输出:
9)LMN:MD26,0-100。0,最终再用fc106转换为word型move到pqw×××,如果pid运算结果不再有工艺条件其他限制可以用LMN_PER更简单就不用fc106了。
4.用PLCSIM模拟的经验技巧
对于没有控制器的编程者来说,用PLCSIM模拟的经验技巧如下:
(1)手动
man_on=true,看输出是否等于man。
(2)自动
man_on=false,调整PV或者SP,使得有偏差大于死区,看输出变化,这里的模拟只能说明PID工作了,不能测试实际调节效果。
(3)如果需要反作用,有三种方法:
1)PV和SP颠倒输入;
2)P值用负的;
3)输出用100减。

连续控制系统中的PID控制规律为式中 KP——比例系数;TI——积分时间常数;TD——微分时间常数;e——偏差;u——控制量。一个线性连续系统的模拟PID控制系统原理框图如图10-36所示。图10-36 模拟PID控制系统原理框图一个PID调节器的比例系数、积分时间常数和微分时间常数一旦确定,该控制器的性能随之确定。比例控制可以迅速反应误差,并减小稳态误差。积分控制的作用:积分控制可以对系统误差进行积分,输出控制量,以消除误差。......
2023-08-30

单片机对于焊接参数的控制,可以通过编程实现有关工艺参数的PID控制算法,利用单片机强大的逻辑功能,可以使PID控制更加灵活。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。......
2023-06-26

S7-200 PLC的编程软件是STEP 7-Micro/WIN。此软件支持三种编程模式:STL(语句表)、LAD(梯形图)、FBD,便于用户选用,三种编程模式间可以相互转换。STEP 7-Micro/WIN需要安装、运行在使用Microsoft(微软)公司的Windows操作系统的计算机上。STEP 7-Micro/WIN V4.0可以在Microsoft公司出品的如下操作系统环境下安装:1)Windows 2000,SP3以上。本章介绍STEP 7-Micro/WIN_V40_SP9版,此软件需占用约300MB空间。......
2023-06-26

实例程序:5.光敏传感器的例程光敏传感器实质是一个光敏电阻,根据光的照射强度会改变其自身的阻值。程序和倾斜开关的例程通用。编程原理:传感器A0口接Arduino板模拟口的A1口,读取传感器的值。......
2023-06-26

功能块PULSEGEN和功能块CONT_C一起,可实现具有脉冲输出的控制器,用于控制比例执行器。在参数分配期间,用户可以激活或取消激活PID控制器的子功能,以使控制器适合实际的工艺过程。......
2023-06-18
为了将这些技术有效地应用于DAON中,本小节设计了SDN控制器与底层设备的扩展功能架构,如图4-4所示。图4-4SDN控制器与底层设备功能架构在数据层,可控设备包括OFBS-ONU、OFBS-WSS和OFBS-AGR,在这些设备中均设有流表、突发装配、突发调度、突发包头生成与处理、SRAM、交叉连接以及Tx/Rx等模块。流监视模块监视统计数据层设备流状态,并将修改信息通过增强的OpenFlow模块传递给底层设备中的流表。......
2023-06-19

PI控制器在频率较低时主要起积分器的作用,而在高频时主要起线性比例放大器的作用。如果输入信号为单位阶跃信号时,其单位阶跃响应为其中,Kp=-R1/R0,PID控制器比例系数;Ti=R1C1,PID控制器积分时间常数;Td=R2C2,PID控制器微分时间常数。随着C2充电,反馈到输入端的电压逐渐增大,控制器输出电压逐渐降低。图4-7 PID控制器a)原理图 b)响应曲线......
2023-06-30
Arduino是源自意大利的一个开放源代码的硬件项目平台,该平台包括一块具备简单I/O功能的电路板以及一套程序开发环境软件。Arduino简化了单片机工作的流程,对AVR库进行了二次编译封装,把端口都打包好,寄存器、地址指针之类的基本不用管,大大降低了软件开发难度,适宜非专业爱好者使用,特别适合学生和一些业余爱好者使用。本文后续内容均在Arduino UNO板上编程。图7-1Arduino UNO R3的开发板......
2023-06-26
相关推荐