PID控制器的功能结构示意图如图9-5所示。两种方式都可以定义PID控制器的控制方式与过程。图9-7 PID基本参数组态图9-7中,“控制器类型”项可以选择控制对象的类型,如温度控制器、压力控制器等,默认为以百分比为单位的通用常规控制器,该选择会影响后面参数的单位。......
2023-06-15
1.STEP 7 PID控制包
PID(Proportin-Integral-Deivative,比例-积分-微分)在自动控制系统中非常普遍,对于S7-300/400 PLC来说,它有专用的PID控制包,即功能块(FB)。该控制包包括了用于连续控制(CONT_C)和步进控制(CONT_S)的控制块,以及用于脉宽调制(PULSEGEN)的FB。
STEP 7 PID控制器块实现了一个纯软件控制器,它所包含的功能块可以提供控制器的所有功能,循环计算所需的数据存储在为FB分配的数据块中。这样,便可以按照需要频繁地调用FB。功能块PULSEGEN和功能块CONT_C一起,可实现具有脉冲输出的控制器,用于控制比例执行器。
2.SFB41功能块
SFB41功能块,即“CONT_C”,它可用于在SIMATIC S7可编程序控制器上控制带有连续输入和输出变量的工艺过程。在参数分配期间,用户可以激活或取消激活PID控制器的子功能,以使控制器适合实际的工艺过程。
SFB41模块可以从图9-2所示中进行调用。
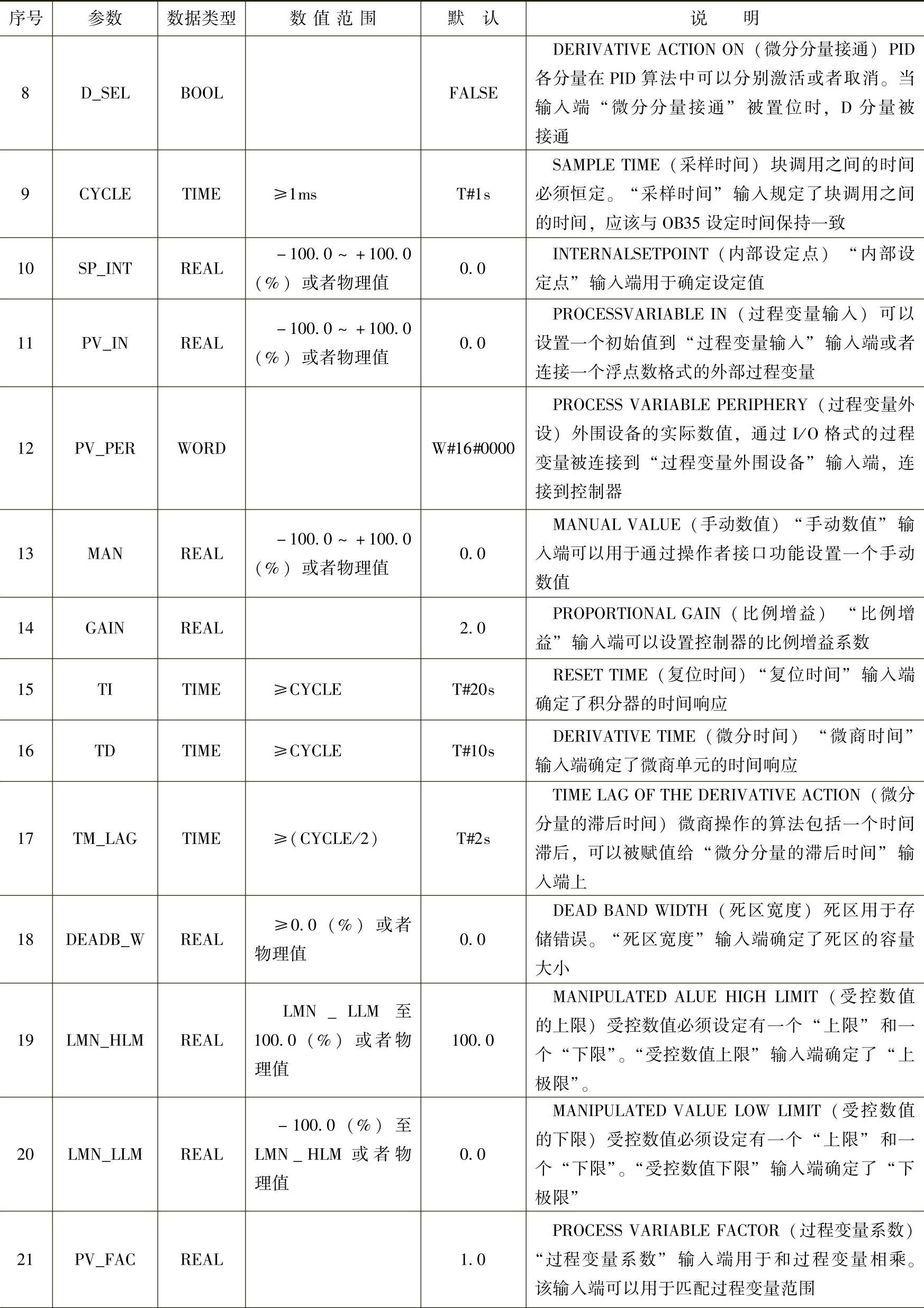
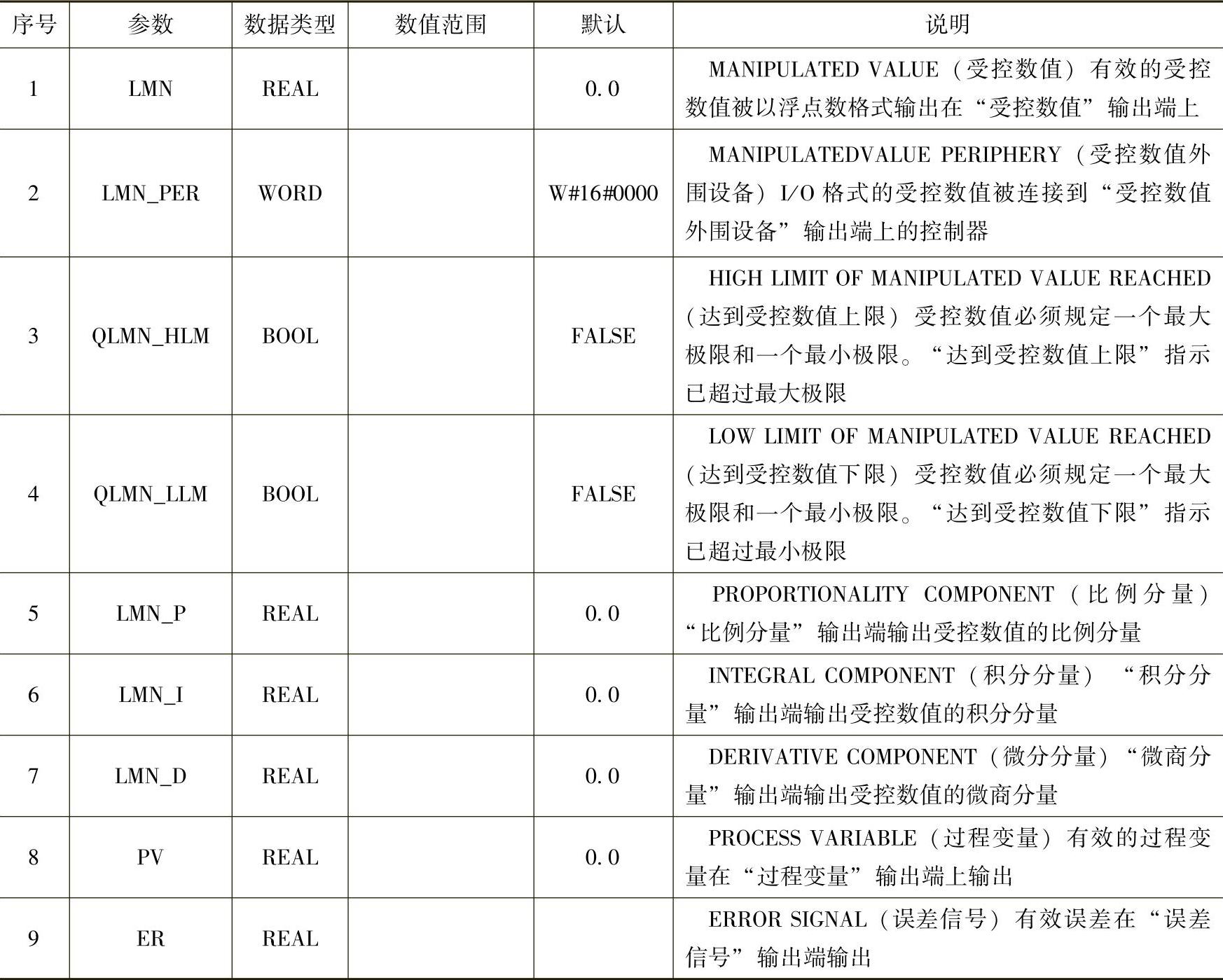
SFB41功能块的输入和输出参数的含义见表9-1和表9-2。
图9-2 SFB41调用途径
表9-1 SFB41功能块输入参数含义

(续)
(续)

表9-2 SFB41功能块输出参数含义

PID控制器的功能结构示意图如图9-5所示。两种方式都可以定义PID控制器的控制方式与过程。图9-7 PID基本参数组态图9-7中,“控制器类型”项可以选择控制对象的类型,如温度控制器、压力控制器等,默认为以百分比为单位的通用常规控制器,该选择会影响后面参数的单位。......
2023-06-15

调宽脉冲信号输出控制电路由模拟开关N13、反相器N10C及周围元件组成,如图3-25所示。图3-25调宽脉冲信号输出控制电路平衡推动电路输出的调宽脉冲信号送到模拟开关N13的4、11端,调宽脉冲信号正常时,窗口比较器N9输出高电平,经反相器N10C反相后输出一个低电平信号到二极管VD22的正极,VD22截止。......
2023-06-26

在ThinkPHP中,开发人员还可以利用空控制器与空动作实现错误404的功能。当然,空控制器与空动作是不能代替服务器的错误页面处理机制的。下面在将分别介绍空控制器与空动作。但Index控制器中并不存在user动作,那么只需要在Index控制器中加入空动作,系统就会把_emtpy动作代替user动作。......
2023-11-04

图1-51经脉冲变压器输出的小晶闸管触发电路之一工作原理:该触发电路由同步电源、脉冲形成和脉冲放大三部分组成。正电源经电阻R8、脉冲变压器绕组ω1、ω2及V2向电容C2充电至12V。该电路可提供多只晶闸管串并联的触发电压和电流。而电源经脉冲变压器TM、二极管VD4和V1向电容C3充电,此电压加在V2两端为正向电压,为V2导通做好准备。图1-54图1-53电路的各点波形图1-55经脉冲变压器输出的小晶闸管触发电路之二......
2023-06-20

多维资源信息交互代理:利用OBI和RBI实现与光控制器和无线控制器交互,周期性地或基于触发事件提供BBU处理资源实用信息。......
2023-06-19

PI控制器在频率较低时主要起积分器的作用,而在高频时主要起线性比例放大器的作用。如果输入信号为单位阶跃信号时,其单位阶跃响应为其中,Kp=-R1/R0,PID控制器比例系数;Ti=R1C1,PID控制器积分时间常数;Td=R2C2,PID控制器微分时间常数。随着C2充电,反馈到输入端的电压逐渐增大,控制器输出电压逐渐降低。图4-7 PID控制器a)原理图 b)响应曲线......
2023-06-30

连续控制系统中的PID控制规律为式中 KP——比例系数;TI——积分时间常数;TD——微分时间常数;e——偏差;u——控制量。一个线性连续系统的模拟PID控制系统原理框图如图10-36所示。图10-36 模拟PID控制系统原理框图一个PID调节器的比例系数、积分时间常数和微分时间常数一旦确定,该控制器的性能随之确定。比例控制可以迅速反应误差,并减小稳态误差。积分控制的作用:积分控制可以对系统误差进行积分,输出控制量,以消除误差。......
2023-08-30
PID功能块提供了比例、积分和微分形式的计算控制。PID运算是非迭代或ISA标准的算法。只要偏差存在,PID功能将对偏差进行积分运算,即将输出向纠正偏差的方向进行。图7-16 PID控制算法功能块PID1.正向和反向作用通过选项参数CONTROL_OPTS中的“Direct acting”位来设置运动的正向或反向作用。若TRK_IN_D或TRK_VAL状态为不可用,输出跟踪功能将关闭,PID状态将回到正常操作状态。......
2023-11-22
相关推荐