1)配置新型激光测量仪,连续监测型材尺寸,并根据结果调整牵引机和挤出机速度,从而有效地保证质量。③还可以用挤出压力或流速流量与标准直径,再应用精密熔体齿轮泵,依据压力或流速流量传感装置实现闭环全自动控制。④用先进的加料装置实现自动控制。管材生产线的在线测径,是为了严格控制管材径向壁厚的均匀以及外径公差。图1-42 在线壁厚检测系统可视化界面⑤全数字直流电动机调速器在自动调节中的应用。......
2025-09-29
1.控制要求
图5-61所示为两种液体的混合装置结构图。SL1、SL2和SL3为液面传感器,液面淹没时触点接通,两种液体(液体A和液体B)的流入和混合液体流出分别由电磁阀YV1、YV2、YV3控制,M为搅拌电动机,控制要求如下:
1)初始状态。当装置投入运行时,液体A、B阀门关闭,混合液体阀门打开20s,将容器内液体放空后关闭。

图5-61 液体混合装置
2)起动操作。按下起动按钮SB1,装置就开始按下列给定的规定动作工作。液体A阀门打开,液体A流入容器。当液面到达SL2时,SL2触点接通,关闭液体A阀门,同时打开B阀门。当液面到达SL1时,SL1触点接通,关闭液体B阀门,此时搅拌电动机工作,1min后停止,混合液体阀门打开,开始放出混合液体。当液面下降到SL3时,SL3触点由接通变为断开,再经过20S后,容器放空,关闭混合液体阀门,开始下一周期操作。
3)停止操作。按下停止按钮SB2后,在当前的混合操作处理完毕后,才停止操作,即停在初始状态上。
2.硬件设计
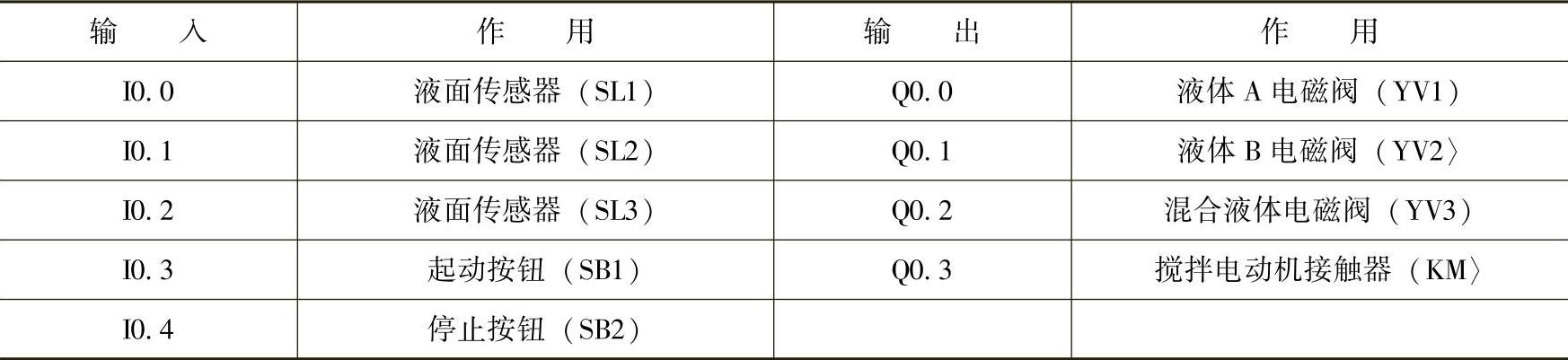
本系统采用S7-300 PLC进行控制,输入和输出资源分配如表5-4所示。
表5-4 液体自动混合装置的PLC控制
接线原理图如图5-62所示。
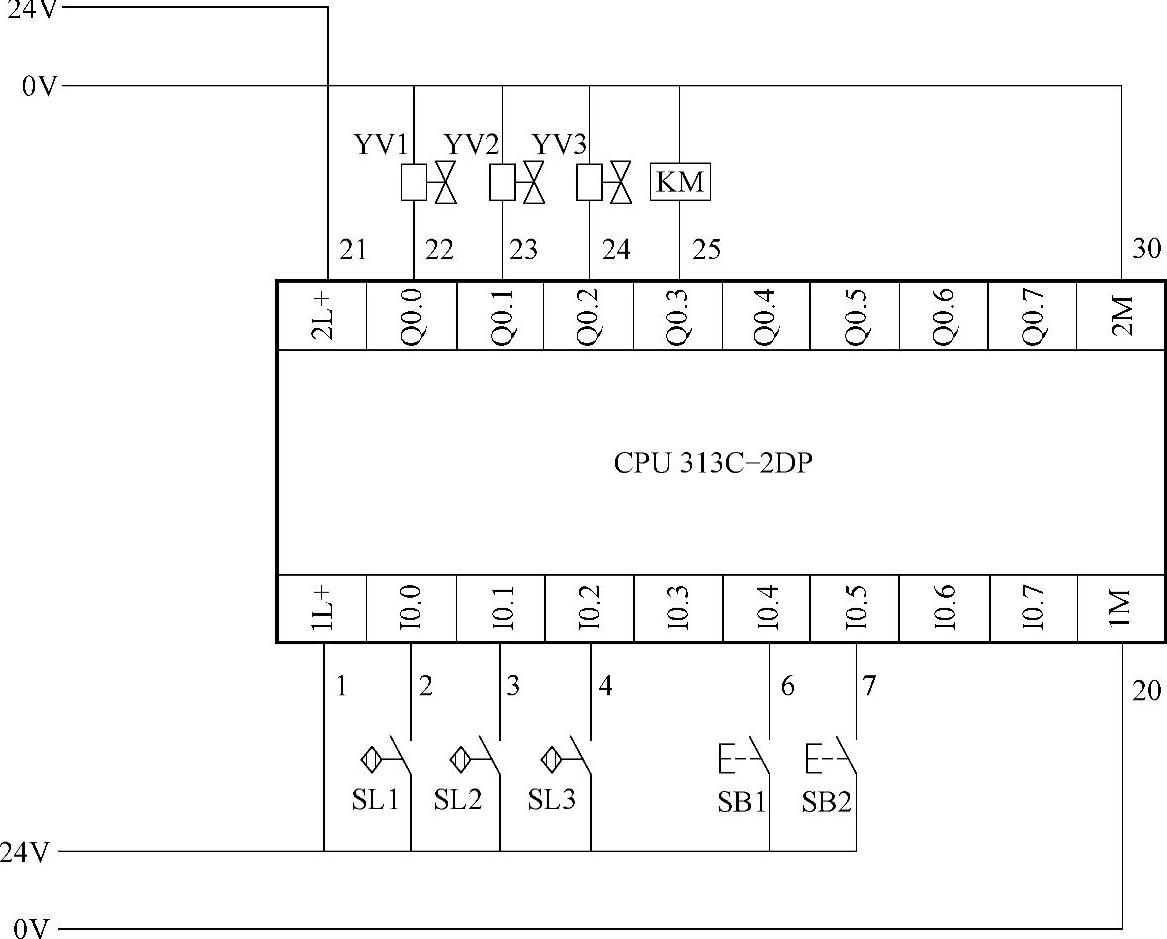
图5-62 液体混合控制电气接线
3.硬件配置(同5.3.1节送料机控制)
4.软件编程(https://www.chuimin.cn)
(1)软件编程思路
液体自动混合从控制要求上可以看出,这是顺序控制。主要考虑停止操作,即按下停止按钮SB2后,在当前的混合操作处理完毕后,才停止操作,即停在初始状态上。就是说按下停止按钮不能立即停止,若立即停止在工艺上是不允许的,会出现事故。因此停止按钮的作用就是停止循环。
图5-63所示是本项目的顺序控制思路。
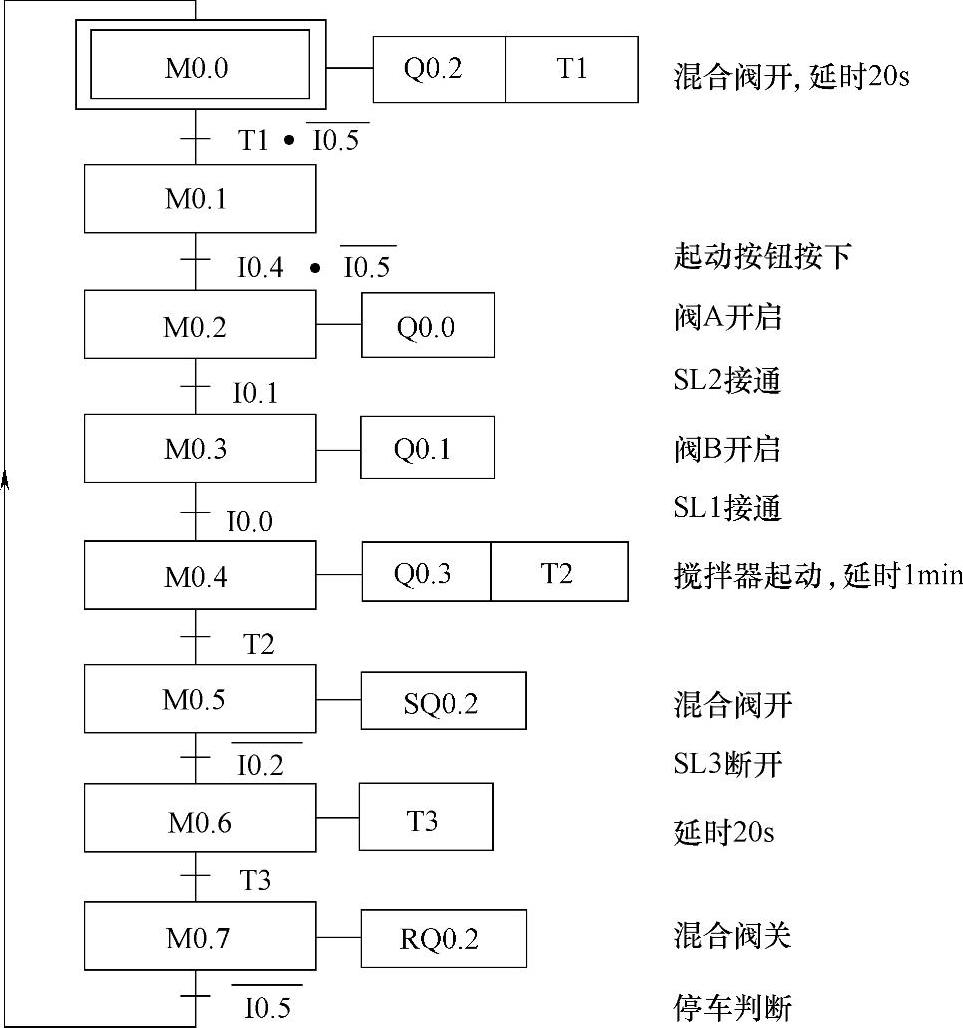
图5-63 顺序控制思路
(2)程序整体如图5-64所示
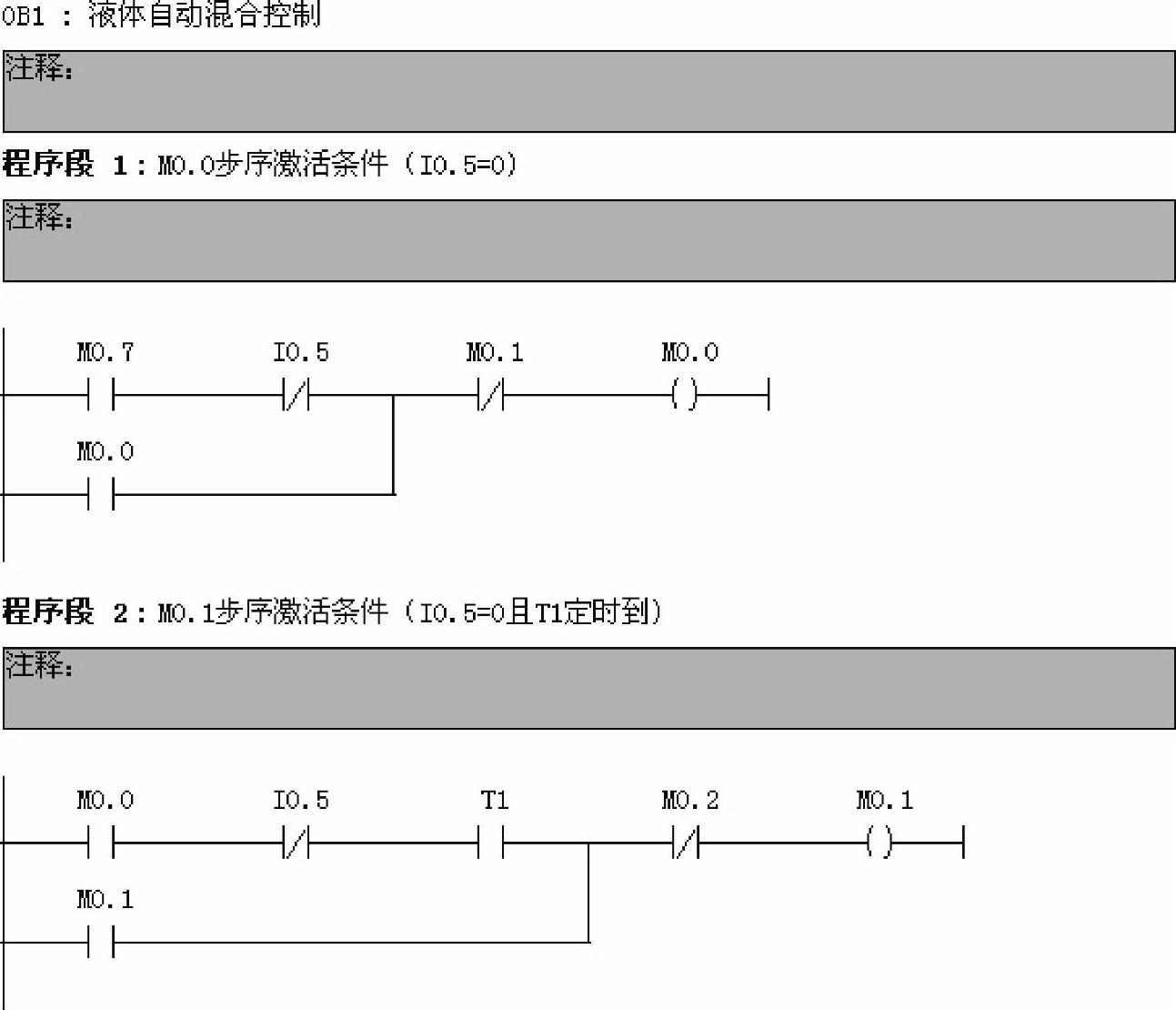
图5-64 液体自动混合主程序
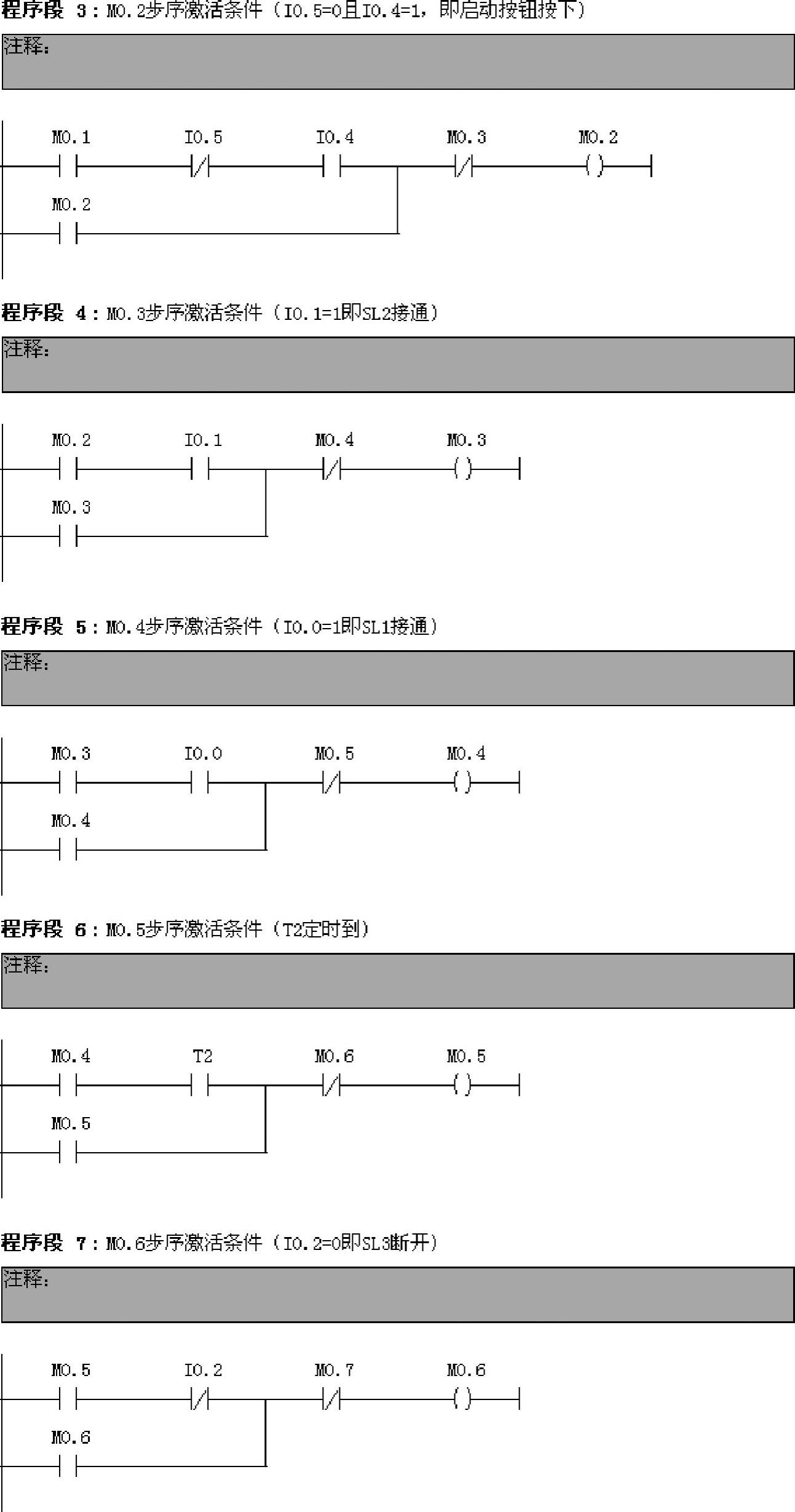
图5-64 液体自动混合主程序(续)
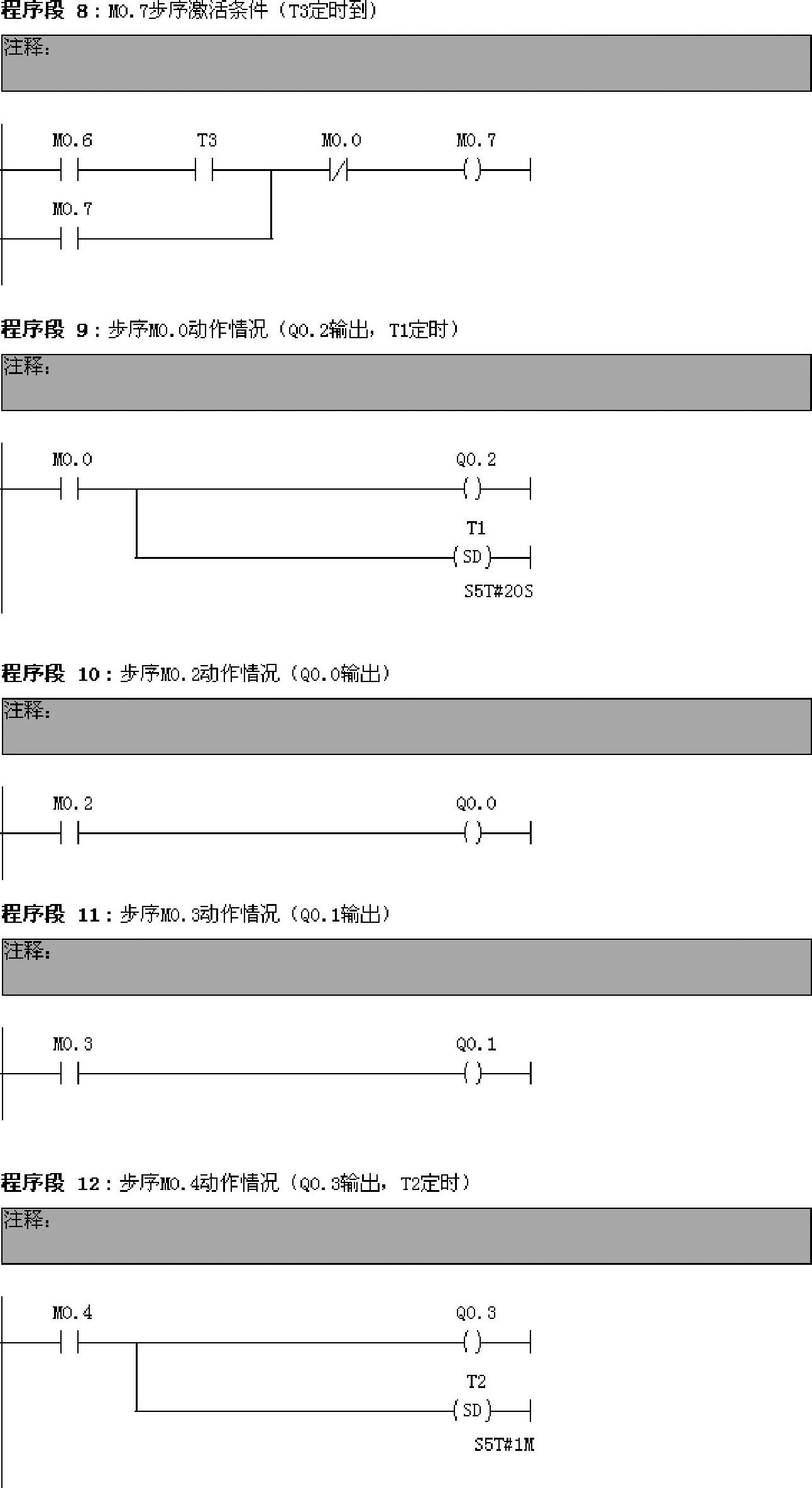
图5-64 液体自动混合主程序(续)
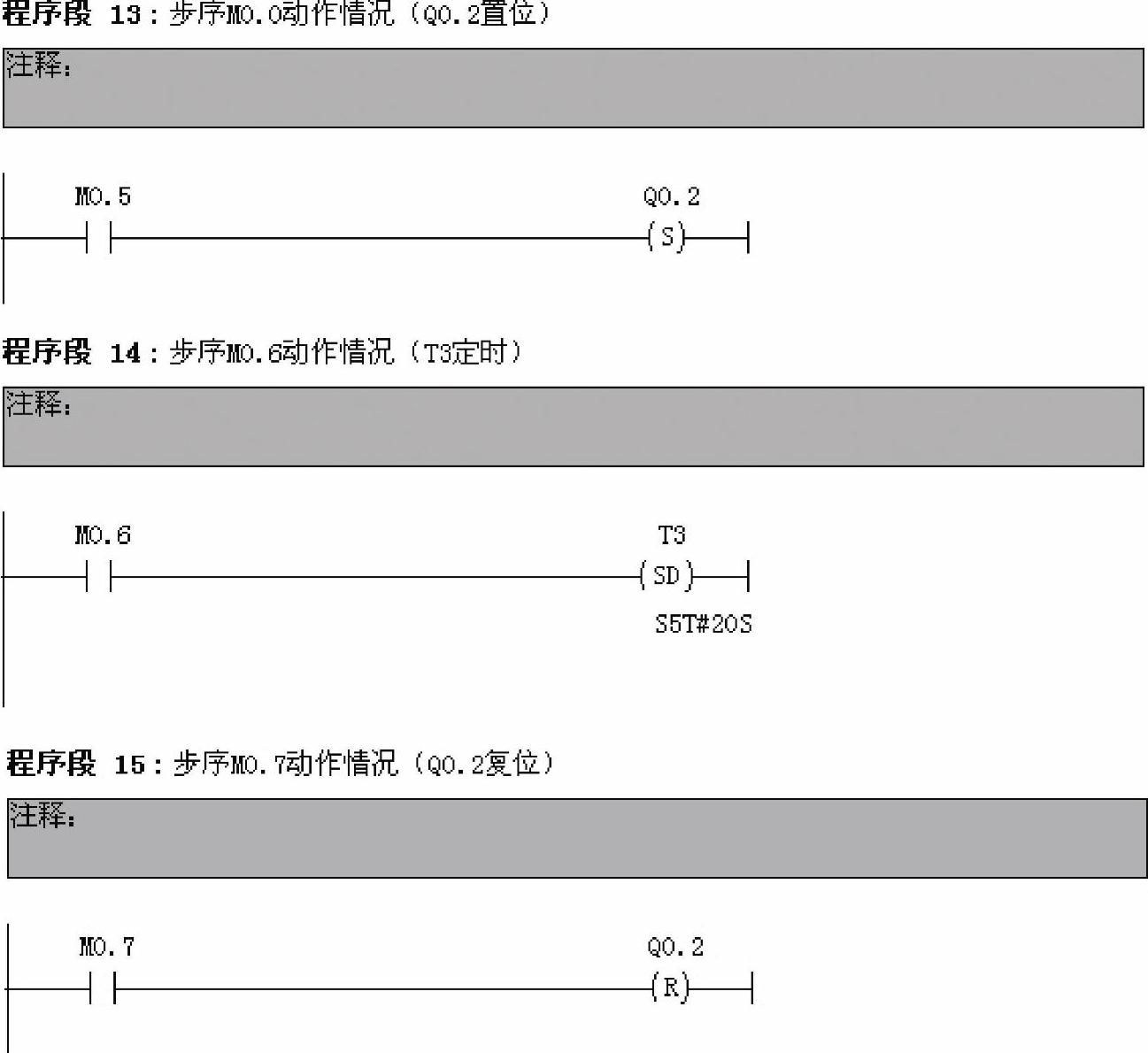
图5-64 液体自动混合主程序(续)
相关文章

1)配置新型激光测量仪,连续监测型材尺寸,并根据结果调整牵引机和挤出机速度,从而有效地保证质量。③还可以用挤出压力或流速流量与标准直径,再应用精密熔体齿轮泵,依据压力或流速流量传感装置实现闭环全自动控制。④用先进的加料装置实现自动控制。管材生产线的在线测径,是为了严格控制管材径向壁厚的均匀以及外径公差。图1-42 在线壁厚检测系统可视化界面⑤全数字直流电动机调速器在自动调节中的应用。......
2025-09-29

图4-31运行控制子程序流程说明4)“通信”子程序“通信”子程序的功能包括从站报警信号处理,转发以及向HMI提供输送单元机械手当前位置信息。......
2025-09-29

在联机运行情况下,由工作任务书规定的各从站工艺过程是基本固定的,原单机程序中工艺控制程序基本变动不大。工作任务书明确地规定了工作模式切换的条件,目的是避免误操作的发生,确保系统可靠运行。......
2025-09-29

弹道导弹具有较强的修正能力, 弹道导弹的射击方向与发射装置和目标点之间的连线方向重合即可, 导弹飞行中控制系统将其严格控制在发射平面内直至命中目标。基于以上5 方面的原因, 无法将弹道摄动理论直接挪用到弹道修正火箭弹上。......
2025-09-29

继电器控制式正转控制线路如图4-16所示。调节端子10、2、5外接电位器RP,变频器输出电源频率会发生改变,电动机转速也随之变化。3)变频器异常保护。同时继电器KA线圈也失电,3个KA常开触头均断开。在变频器运行时,若要切断变频器输入主电源,必须先对变频器进行停转控制,再按下按钮SB1,接触器KM线圈失电,KM主触头断开,变频器输入电源被切断。......
2025-09-29

PLC是英文Programmable Logic Controller的缩写,意为可编程序逻辑控制器,是一种专为工业应用而设计的控制器。图5-1列出了几种常见的PLC。图5-1 几种常见的PLC由于PLC一直在发展中,至今尚未对其下最后的定义。......
2025-09-29

中包车行走有三种驱动方式:电动机驱动、液压马达驱动和电动机正常驱动、液压马达事故驱动。3)为了实现正常驱动和事故驱动的切换,在比例阀前后设置了液控单向阀组2,中包车停止时或做事故驱动时,液控单向阀锁死,中包车正常驱动时,先打开液控单向阀,将系统、液压马达与比例阀联通,然后给予比例阀信号,控制中包车开始动作。......
2025-09-29

相关推荐