表5-1 常用的位逻辑指令1.基本逻辑指令常开触点对应的存储器地址位为1状态时,该触点闭合。当I0.2=1,I0.3=1时,Q4.0~Q4.7被复位为零。图5-4 置位域复位域指令图5-5 触发器的置位复位指令触发器指令上的M0.0和M0.1称为标志位,R、S输入端首先对标志位进行复位和置位,然后再将标志位的状态送到输出端。编写程序如图5-12所示,其中M1.5为CPU时钟存储器MB1的第5位,其时钟频率为1 Hz。......
2023-06-15
针对S7-300/400 PLC的开关量控制,需要重点掌握STEP7的位逻辑指令。
STEP 7位逻辑指令可以分为位逻辑运算指令、定时器指令、计数器指令、位测试指令。
1.位逻辑运算指令
位逻辑运算指令是对“0”和“1”的布尔操作数进行扫描,经过相应的位逻辑运算,将逻辑运算结果“0”和“1”送到状态字的RLO位。
图3-1所示为AND与OR的电路图及LAD、STL与FBD的工作原理,与S7-200基本类似。
图3-2所示为XOR的工作原理,当两个信号中仅有一个满足时,输出信号状态才是“1”,其余全部为“0”。
其余置位和复位指令、上升沿与下降沿、取反等与S7-200等小型PLC相同,不再一一列出。
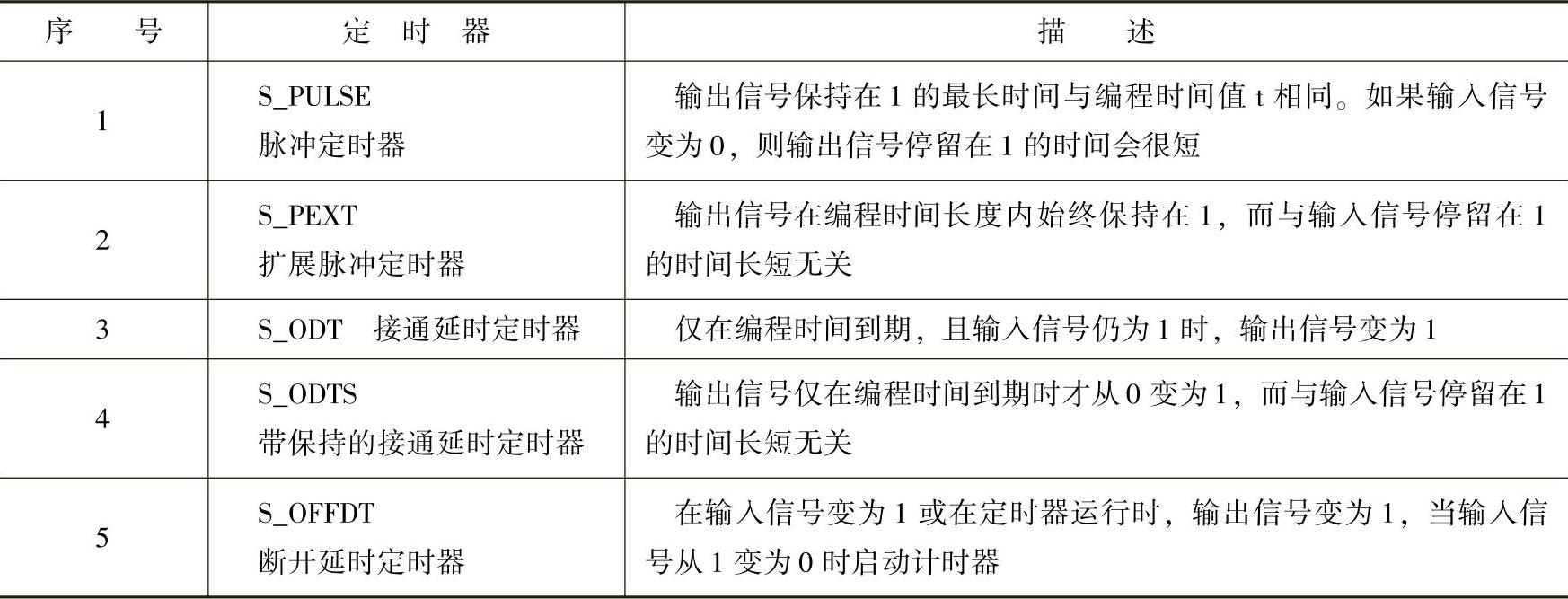
2.定时器指令
定时器可以提供等待时间控制,还可产生一定宽度的脉冲,也可以测量时间。它是一种由位和字组成的复合单元,定时器的触点由位表示,其定时时间值存储在字存储器中。STEP 7定时器可分为5种,见表3-1。
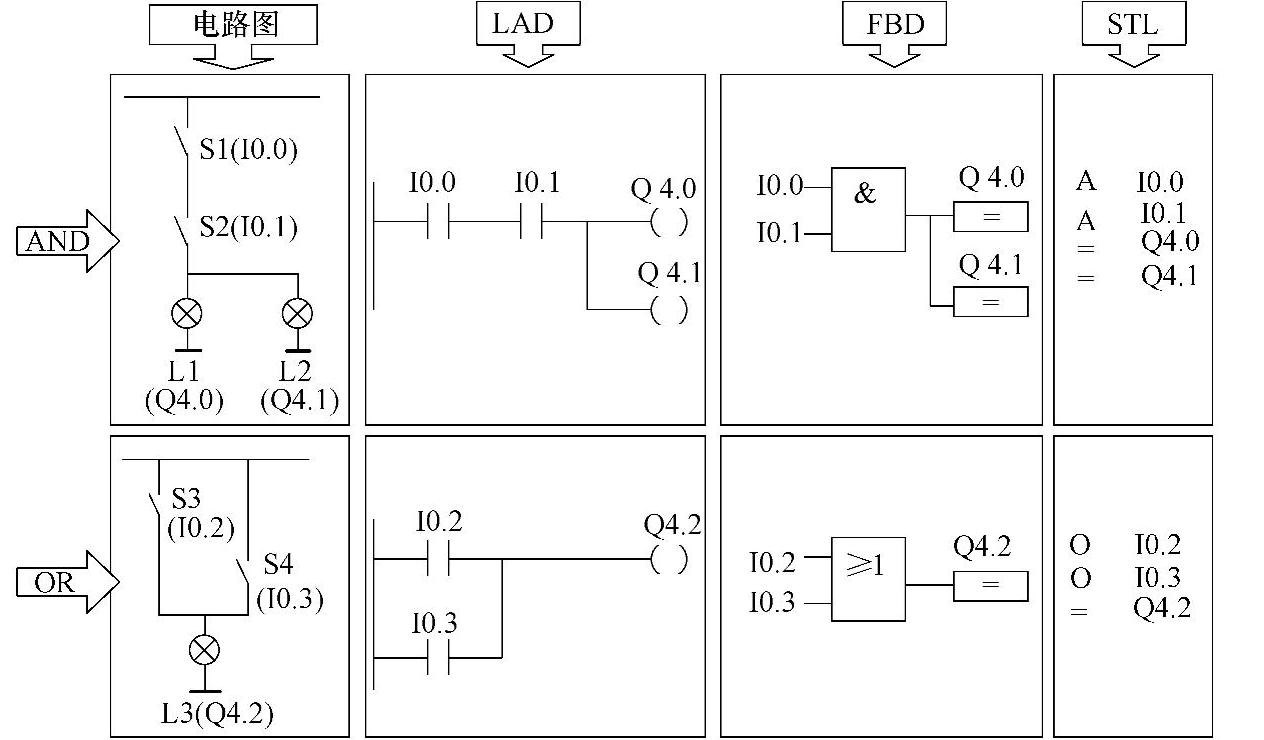
图3-1 AND与0R的工作原理
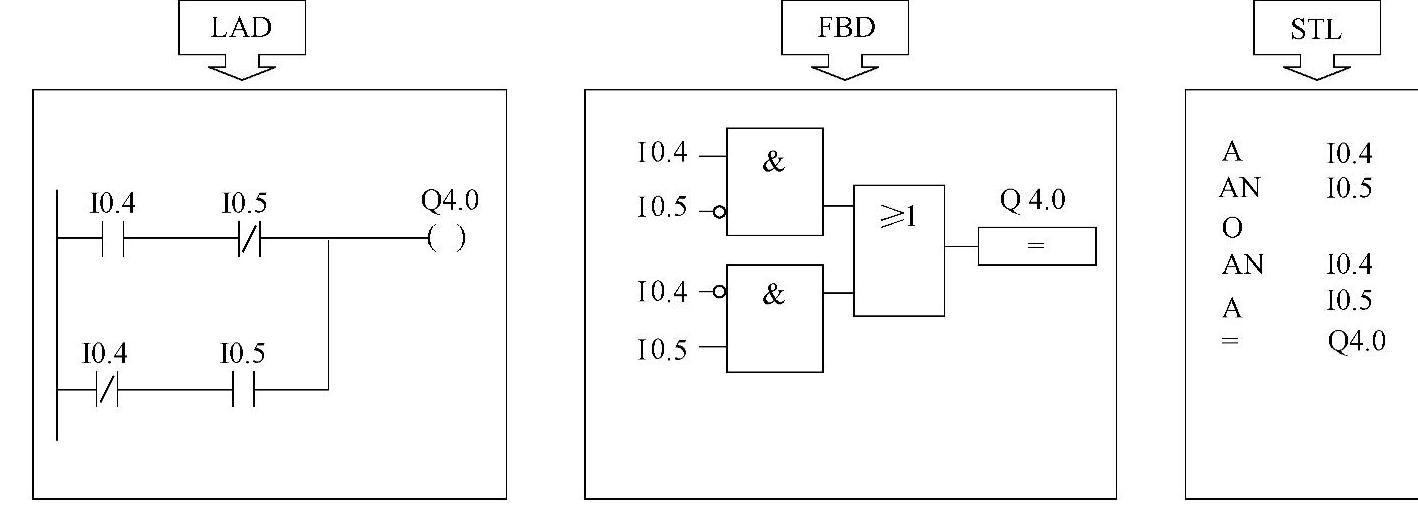
图3-2 XOR的工作原理
表3-1 S7定时器类型
这5种定时器的工作特点如图3-3所示,其中输入信号为I0.0,定时器触点信号接到输出Q4.0。
定时器字的0~9位包含二进制编码的时间值。此时间值指定多个单位。时间更新可按照由时间基准指定的间隔将时间值递减一个单位。递减会持续进行,直至时间值等于零为止。可以在累加器1的低字中以二进制、十六进制或二进制编码的十进制(BCD)格式装入时间值。
S7定时器可以用以下任一格式预装入时间值:
◆ W#16#wxyz,其中w=时间基准(即时间间隔或分辨率);此处xyz=以二进制编码的十进制格式表示的时间值。
◆ S5T#aH_bM_cS_dMS,其中H=小时,M=分钟,S=秒,MS=毫秒;a、b、c、d由用户定义。如自动选择时间基准,其值舍入为具有该时间基准的下一个较小的数字。

图3-3 定时器的工作特点
S7定时器可以输入的最大时间值是9990s或2H_46M_30S,具体如:
S5TIME#4S=4秒;
s5t#2h_15m=2小时15分钟;
S5T#1H_12M_18S=1小时12分钟18秒。
3.计数器指令
S7计数器用于对RLO正跳沿计数,计数器字中的0~11位包含二进制代码形式的计数值,当设置某个计数器时,计数值移至计数器字,计数值的范围为0~999,如图3-4所示。
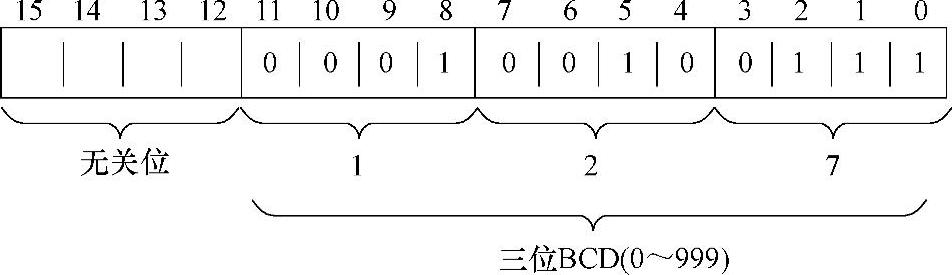
图3-4 计数器的组成
可使用三种计数器指令在此范围内改变计数值:S_CUD为双向计数器;S_CD为降值计数器;S_CU为升值计数器。

表5-1 常用的位逻辑指令1.基本逻辑指令常开触点对应的存储器地址位为1状态时,该触点闭合。当I0.2=1,I0.3=1时,Q4.0~Q4.7被复位为零。图5-4 置位域复位域指令图5-5 触发器的置位复位指令触发器指令上的M0.0和M0.1称为标志位,R、S输入端首先对标志位进行复位和置位,然后再将标志位的状态送到输出端。编写程序如图5-12所示,其中M1.5为CPU时钟存储器MB1的第5位,其时钟频率为1 Hz。......
2023-06-15

对于复杂的开关量控制,尤其是点数多、过程复杂的项目来说,还必须了解STEP 7数据指令。STEP 7位数据指令可以分为装载与传送指令、比较指令、算术运算指令、数据逻辑运算指令、移位和循环指令、数据块指令。图3-5 万能转换开关实数实数是用十进制数表示的正数或负数。为了表示10的乘方次数,可以用幂的形式表示实数。例如:1024可以表示为1.024E3。实数的表示范围是:-3.402823×1038~3.402823×1038。图3-6所示为整数205和实数125.5的数据保存格式。......
2023-06-18

表3-14所示为逻辑控制指令的STL表达方式,很多逻辑控制指令在梯形图中不一定会有,这一点需要读者注意。逻辑控制跳转中,只能在同一逻辑块内跳转;同一个跳转目的地址只能出现一次;跳转或循环指令的操作数为地址标号,标号由最多4个字符组成,第一个字符必须是字母,其余的可以是字母或数字。表3-14 逻辑控制指令 IW8与MW12的异或结果如果为0,将M4.0复位,非0则将M4.0置位。......
2023-06-18

图6-22 单序列顺序功能图的置位复位法实现由图6-14可知,上电运行或者M0.3步为活动步且满足转换条件I0.3时都将使M0.0步变为活动步,且将M0.3步变为不活动步,采用置位复位法编写的梯形图程序如图6-22的“程序段2”所示。图6-23 选择序列的置位复位法实现图6-24 并列选择序列的置位复位法实现......
2023-06-15

在组态表中,STEP 7自动给每个模块分配一个地址。在可编程序控制器启动时,CPU将比较STEP 7中创建的预置组态与设备的实际组态,从而可立即识别出它们之间的任何差异,并进行。可方便地对模块进行替换,因为在启动期间,自动将使用STEP 7所设置的参数下载给新的模块。......
2023-06-18
S7-1200 PLC的移动指令如表5-5所示。表5-5 移动指令(续)对于数据复制操作有以下规则:1)要复制Bool型数据,应使用SET_BF、RESET_BF、R、S或输出线圈指令。另外需要注意,MOVE_BLK和UMOVE_BLK指令在处理中断的方式上有所不同:MOVE_BLK指令执行期间排队并处理中断事件。UFILL_BLK指令完成执行前排队但不处理中断事件。如果在执行中断OB子程序前移动操作必须完成且目标数据必须一致,则使用UFILL_BLK指令。......
2023-06-15

表5-28 算数运算指令注:双精度浮点数运算指令只有Q系列通用型CPU才支持。图5-13 功能示意图BIN 16位数据的加法运算数据范围为-32768~32767,数据的正负由该数据的最高位b15来判断,为0时是正数,为1时是负数。当X3为ON时,将常数18000减去T3的当前值,结果存放在D3中。图5-14 BIN 16位数据加法程序举例2)BIN16位 除法指令的指令格式为。该指令将S1指定的32位浮点型实数与S2指定的32位浮点型实数相乘,将结果存储到D软元件中,功能示意如图5-17所示。......
2023-06-16

STEP 7 Basic是西门子公司开发的高度集成的工程组态软件,其内部集成了WinCC flexible Bas-ic,提供了通用的工程组态框架,可以用来对S7-1200 PLC和HMI精简系列面板进行高效组态。图4-1 STEP 7 Basic V10.5的两种视图a)Portal视图 b)项目视图STEP 7 Basic作为S7-1200 PLC的编程软件,提供了两种视图:Portal视图和项目视图,如图4-1所示。选择不同的“任务入口”可处理启动、设备和网络、PLC编程、可视化、在线和诊断等各种工程任务。......
2023-06-15
相关推荐