齿轮泵的工作原理如图2-5所示,它是分离三片式结构,三片是指泵盖4、8和泵体7。随着齿轮的旋转,吸入齿间的油液被带到另一侧,进入压油腔。当齿轮泵的主动齿轮由电动机带动不断旋转时,轮齿脱开啮合的一侧由于密封容积变大则不断从油箱中吸油,轮齿进入啮合的一侧由于密封容积减小则不断地排油,这就是齿轮泵的工作原理。......
2025-09-29
普通晶体管是由硅晶体或锗晶体制成的含有两个PN结的三端电子器件,分为NPN和PNP两种类型。最常见的是NPN硅晶体管,它是在一块N型硅平面的部分区域上用扩散方法掺入硼杂质,以形成P型区,然后在P型区再用扩散方法引进磷杂质,成为N+型区。N+型区为发射区,引出线为发射极;P型区引出线为基极;P型区下面的N型区为集电区,引出线为集电极,如图4-24所示。
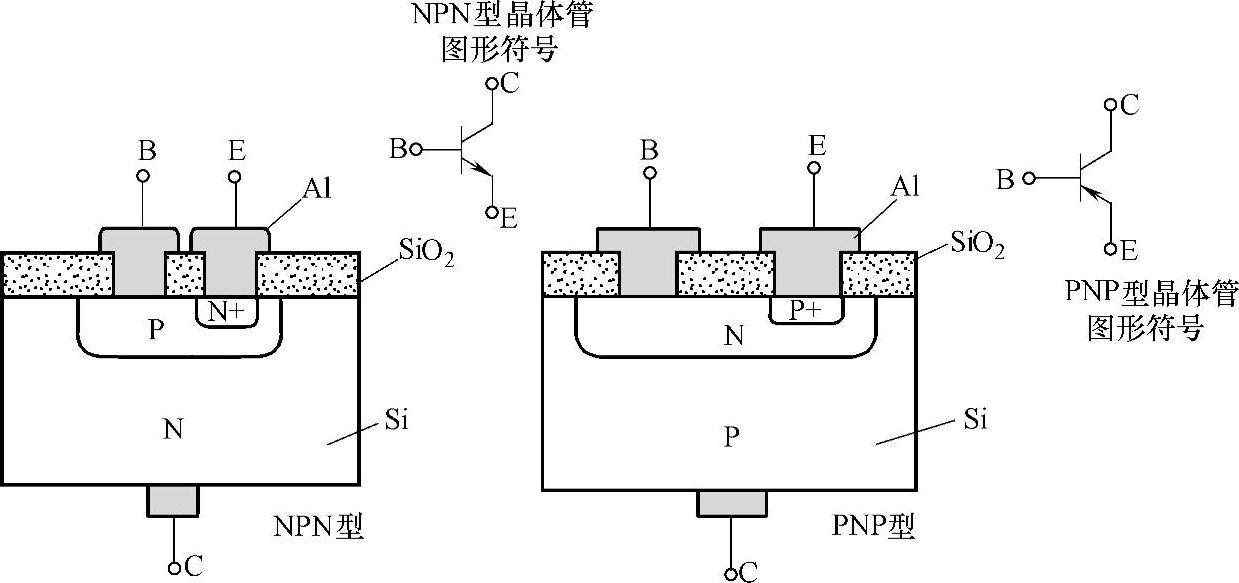
图4-24 硅平面晶体管结构示意图
注:晶体管的正常偏置是,发射结正向偏置,集电结反向偏置。
1.晶体管的基本特性及主要参数
晶体管的基本特性及主要参数是检验晶体管质量的重要依据。因此,不同型号规格的晶体管都有严格的技术要求。
(1)晶体管的基本特性
晶体管的基本特性是在一定条件下能够工作在放大状态或进入饱和导通状态,但它主要有输入和输出两种特性,其特性曲线如图4-25所示。
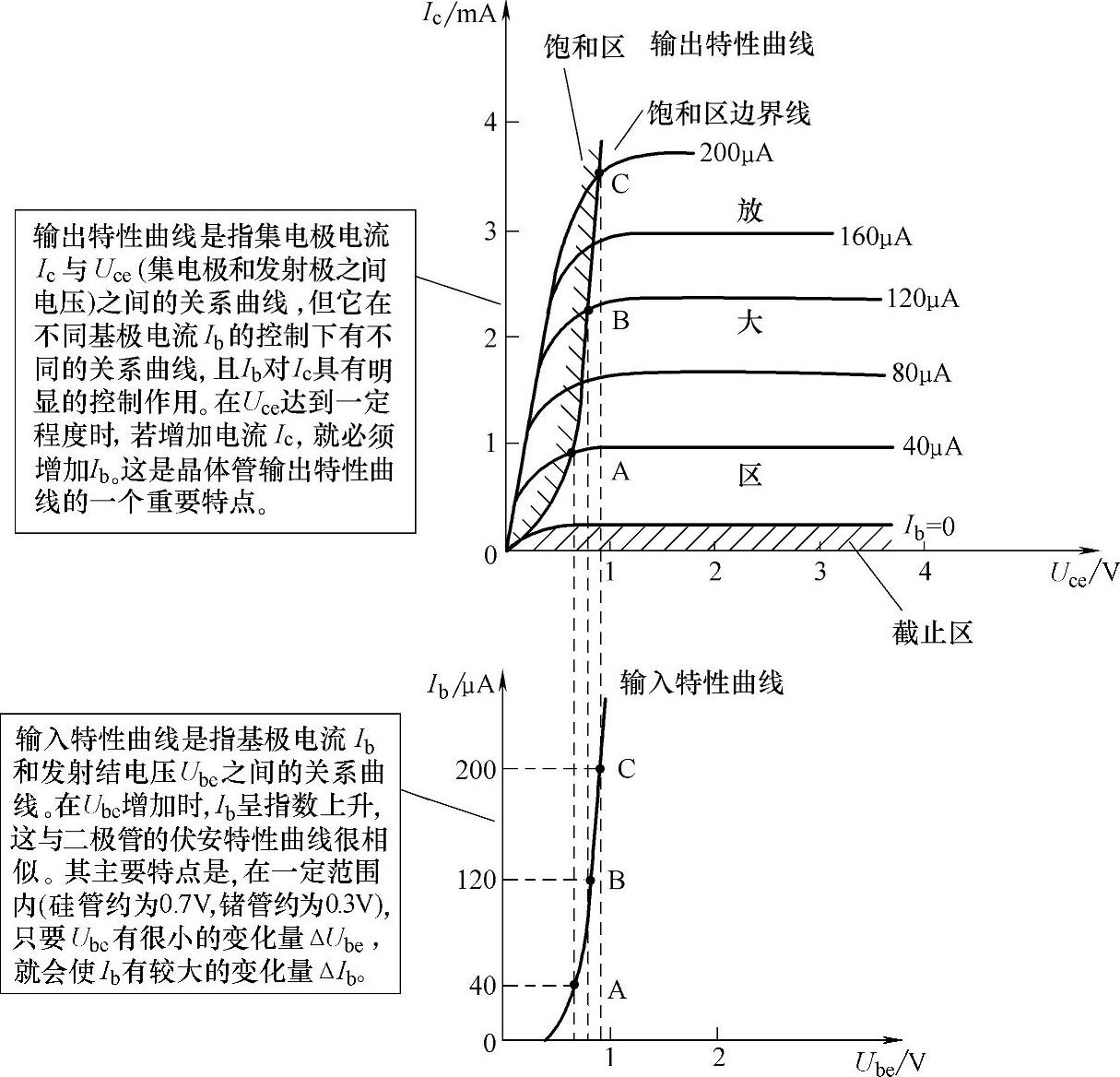
图4-25 晶体管输入输出特性曲线示意图
在图4-25的输出特性曲线中,各条曲线开始向下弯曲时进入的区域通常称为饱和区,这个区域越窄越好。在饱和区内Ic值随着Uce减小会迅速下降,也就是Ib对Ic的控制作用迅速减弱。在Uce减小到等于Ube时,晶体管将处于临界饱和状态。这是晶体管的重要性质。
(2)晶体管的主要参数符号及表示意义
晶体管的技术参数较多,并都有严格的标准要求。一些常见的主要参数符号及表示意义如下:
1)β为交流电流放大系数或动态电流放大系数, 。
。
2)β为直流电流放大系数或静态电流放大系数, 。
。
3)ICBO为发射极开路时,集电极-基极反向电流,或称集电结反向电流。
4)ICM为集电极最大允许电流。
5)Iceo为基极开路时,集电极与发射极之间的反向电流。
6)IBM为基极最大允许电流。
7)ICMP为集电极脉冲电流。
8)IC为hFE下降到测试值 时的集电极电流。
时的集电极电流。
9)IB为基极直流电流。
10)IEBO为集电极开路时,发射极与基极之间的反向截止电流。
11)PCM为集电极最大耗散功率。
12)hFE为共发射极静态电流放大系数。
13)fT为特征频率。
14)BVCBO[V(BR)CBO]为发射极开路,集电极-基极反向击穿电压。
15)BVCEO[V(BR)CEO]为基极开路,集电极-发射极反向击穿电压。
16)BVEBO[V(BR)EBO]为集电极开路,发射极-基极反向击穿电压。
17)VCBO为发射极开路,集电极-基极(直流)电压。
18)VCEO为基极开路,集电极-发射极(直流)电压。
19)VEBO为集电极开路,发射极-基极(直流)电压。(https://www.chuimin.cn)
20)VBES[VBE(sat)]为基极-发射极饱和压降。
21)VCES[VCE(sat)]为集电极-发射极饱和电压。
22)VAGC为正向自动增益控制电压。
23)VDRM为断态重复峰值电压。
24)VRRM为反向重复峰值电压。
25)PD为耗散功率。
2.晶体管的种类及型号
晶体管的种类及型号较多,它主要分为大、中、小三种类型,并有高低频之别,同时,在小功率晶体管中又有一些贴片形式。但这里因篇幅所限,只作简要介绍。
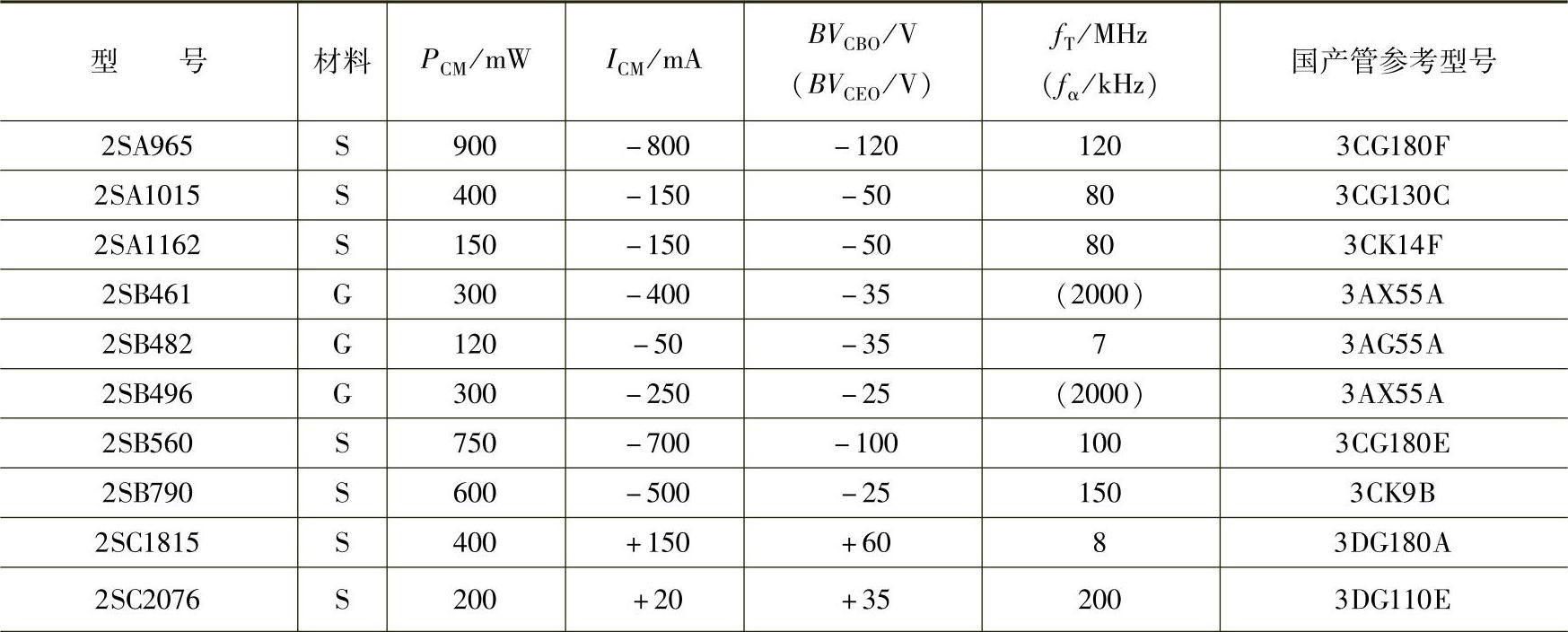
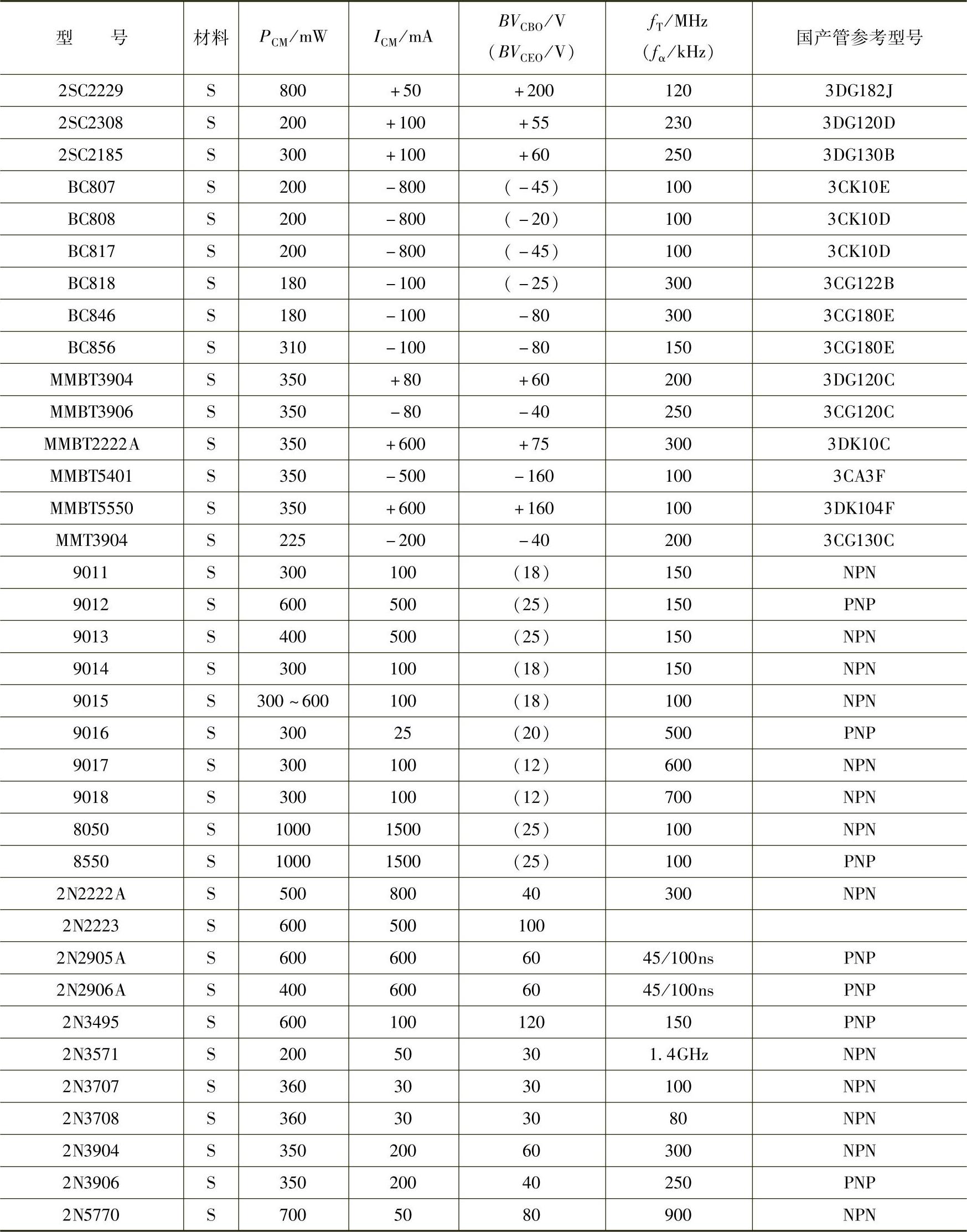
(1)小功率晶体管型号及主要参数值
小功率晶体管多用于小信号处理及开关控制等电路,其主要特征是:PCM<1W;IC<1A。一些常见型号及主要参数值见表4-11。
表4-11 常见小功率管型号及主要参数值
(续)
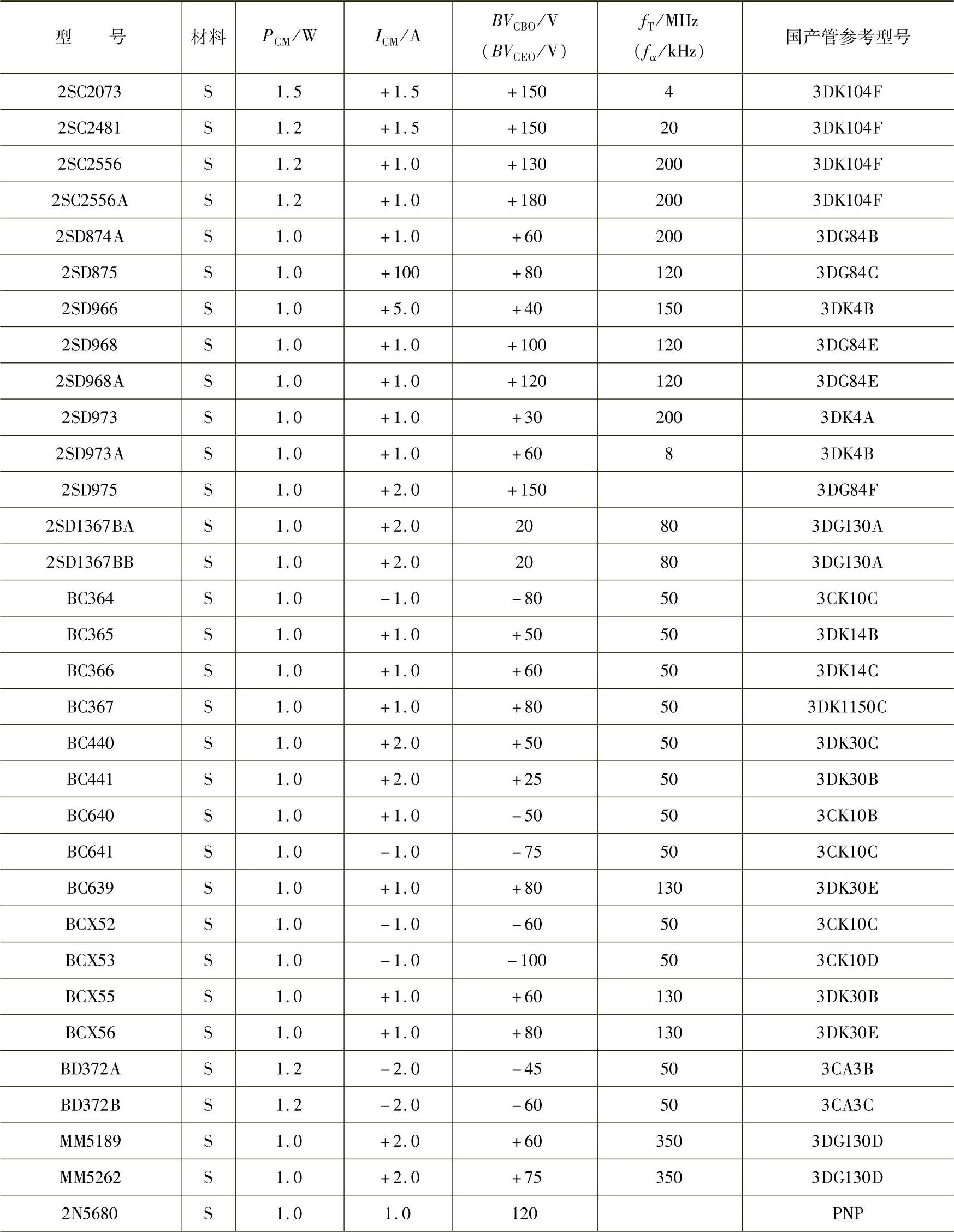
(2)中功率晶体管型号及主要参数值
中功率晶体管多用于激励输出及视频信号放大输出等电路,其主要特征是:1W≤PCM≤2W;1A≤IC≤2A。一些常见型号及主要参数值见表4-12。
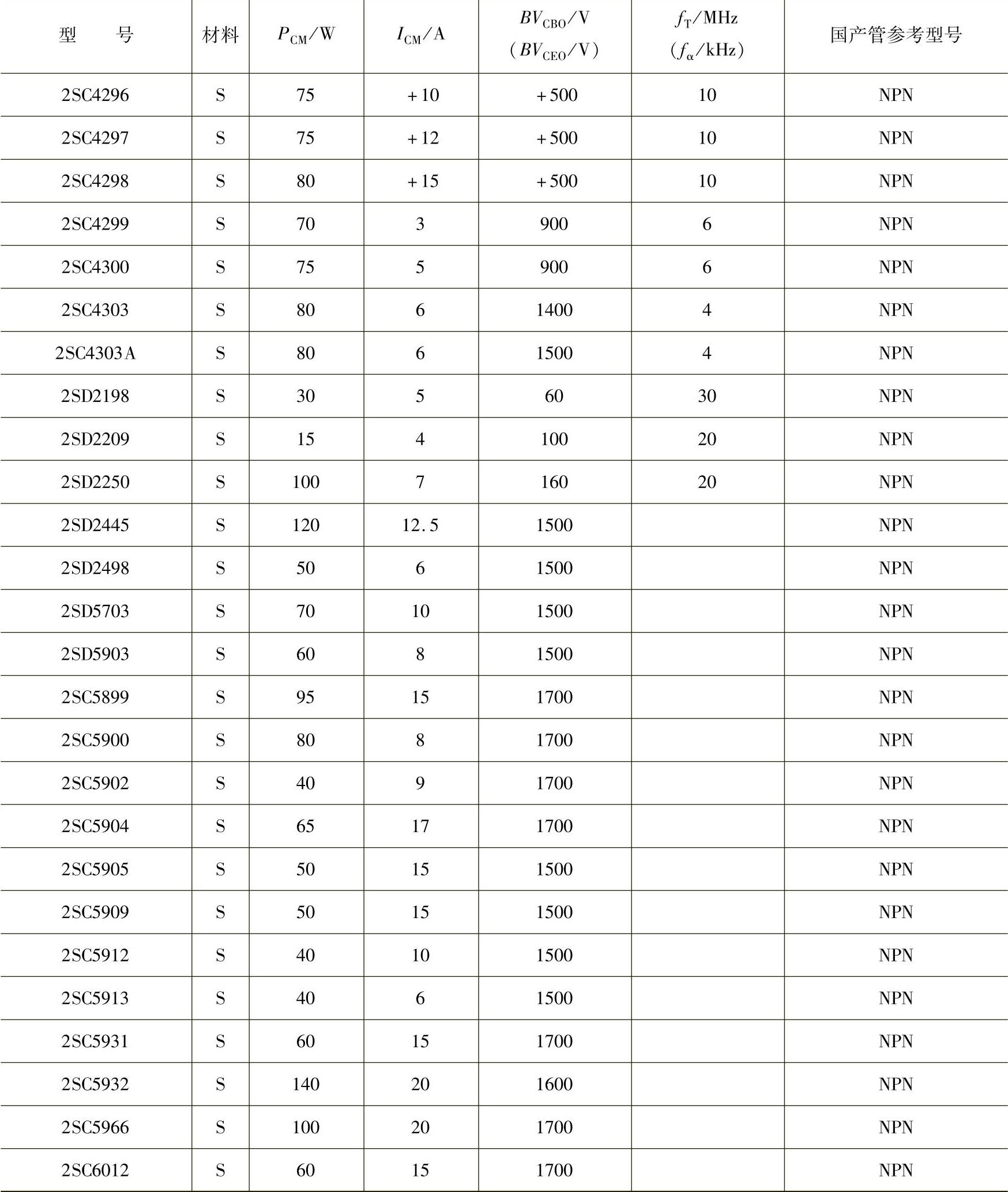
(3)大功率晶体管型号及主要参数值
大功率晶体管多用于电源开关稳压及大功率输出级等电路,其主要特征是:PCM>2W;IC>2A。一些常见型号及主要参数值见表4-13。
表4-12 常见中功率晶体管型号及主要参数值
(续)
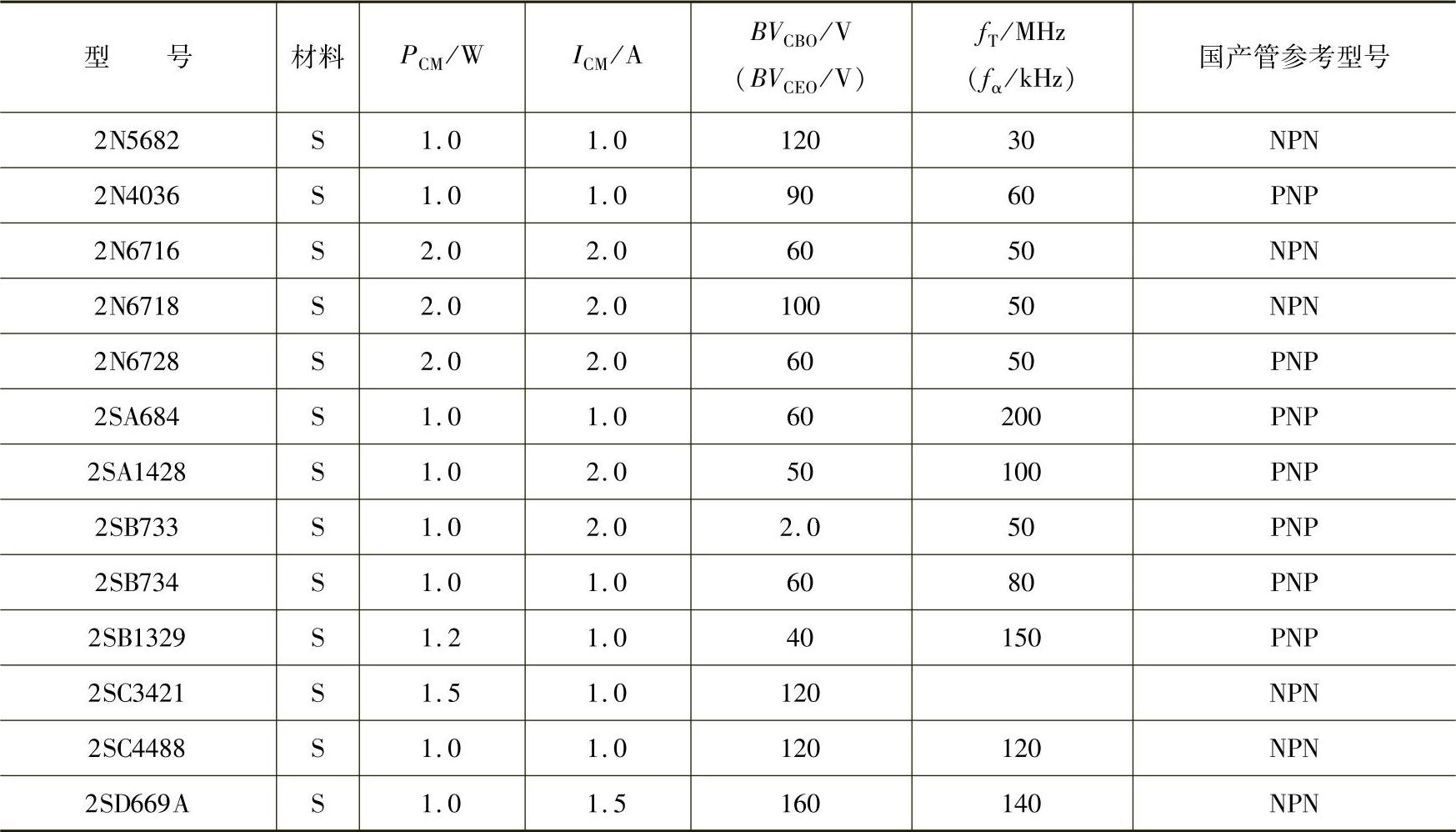
表4-13 常见大功率晶体管型号及主要参数值
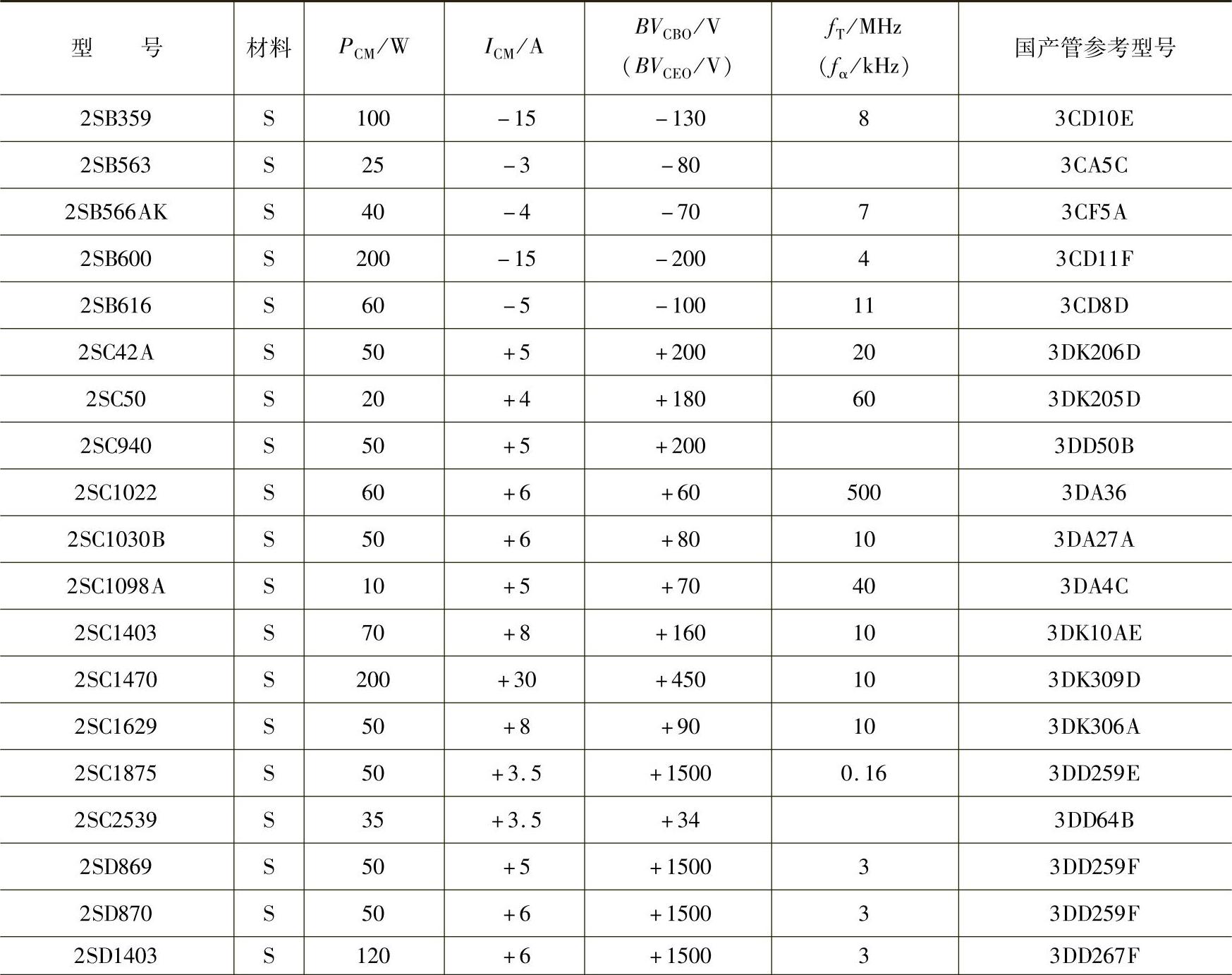
(续)
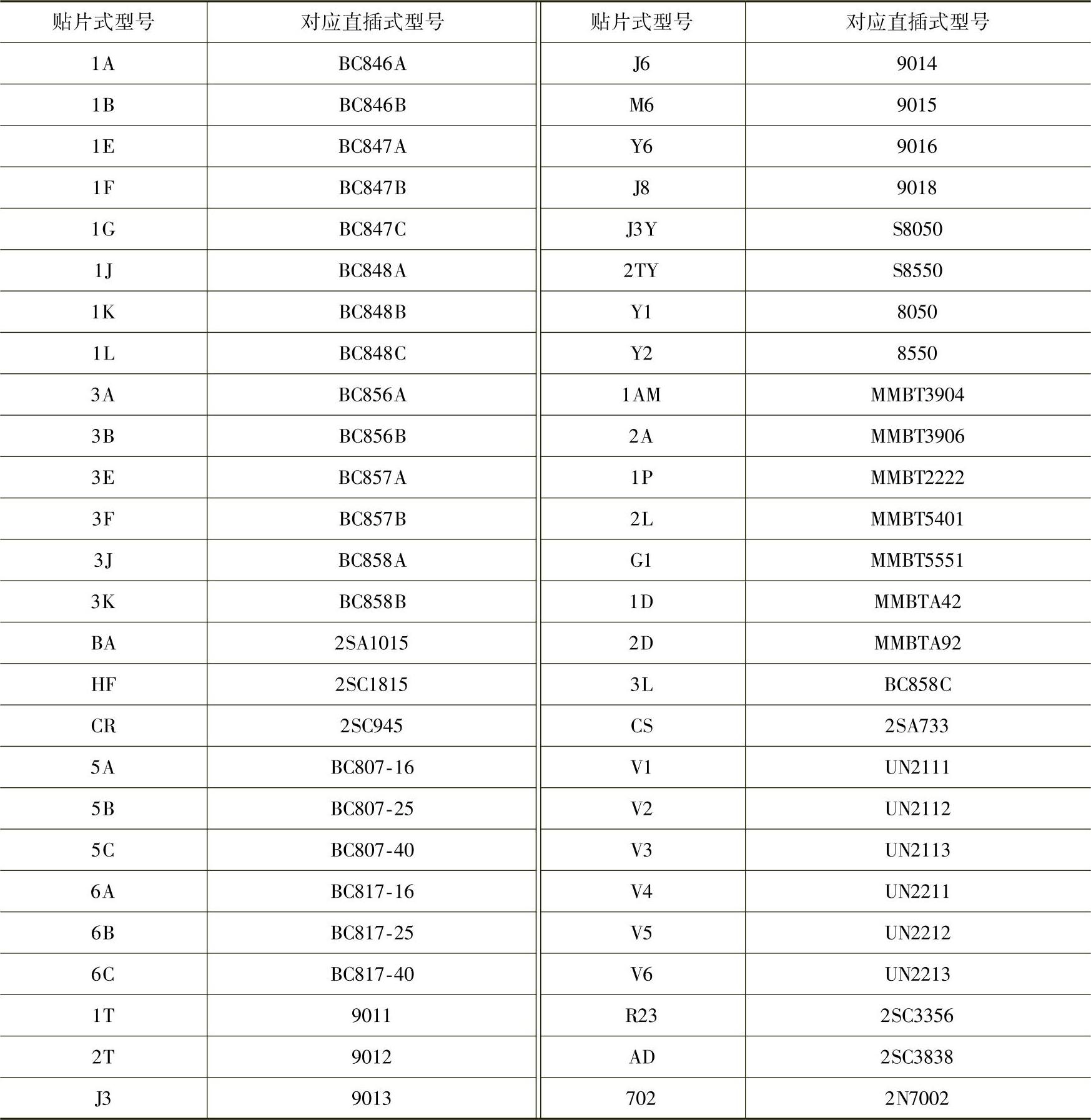
(4)贴片式晶体管与直插式晶体管的对应型号
贴片式晶体管是随着双面板印制线路及高精细化要求而出现的微小型电子元器件,但它们大部是在直插式晶体管的基础上制成的。因此,贴片式晶体管代码与直插式晶体管都有对应型号。
通过查找对应型号,即可知道不同代码贴片式晶体管的主要技术参数。一些常见贴片式晶体管与直插式晶体管的对应型号见表4-14。
表4-14 常见贴片式晶体管与直插式晶体管对应型号
相关文章

齿轮泵的工作原理如图2-5所示,它是分离三片式结构,三片是指泵盖4、8和泵体7。随着齿轮的旋转,吸入齿间的油液被带到另一侧,进入压油腔。当齿轮泵的主动齿轮由电动机带动不断旋转时,轮齿脱开啮合的一侧由于密封容积变大则不断从油箱中吸油,轮齿进入啮合的一侧由于密封容积减小则不断地排油,这就是齿轮泵的工作原理。......
2025-09-29

LED本质上是单色的,转换效率取决于发射的波长。所以LED将发射出中心频率为ν1、半最大值全宽度为ΔνFWHM的光线。图1-13 一种直接带隙半导体的能带图图1-14 LED发出准单色光谱,但光的 强度和光谱宽度与结温密切相关实际中,第1个商用LED是红色的。注意式(1-2)和式(1-3)得到的值与结温密切相关,所以如果结温发生变化,LED的颜色将随着时间发生彻底的改变。......
2025-09-29

随着液压传动系统控制流量的不断增大,电磁换向阀已不能满足系统的要求。图中三位阀是手动换向阀,两位阀是电磁换向阀。图1-60 电液动换向阀的代表符号通过该任务的实施,明确了四种执行电器的结构、工作原理等。......
2025-09-29
在式(4-2)中,若m为常数,且[(2/ρ)Δp]m也是常数,调节A,则可调节通过节流阀的流量q。它表示了在A为某一定值时,通过节流阀的流量q和节流口上下游压力差Δp的关系。从图4-33可见,当A一定时,Δp越大,q也越大,从式(3-1)可见它们之间是2次方的关系。当Δp变化时,通过节流阀的流量q也发生变化,而通过节流阀的流量就是进入执行机构的流量,故缸的运动速度也变化。......
2025-09-29

在多CPU系统中,多CPU控制各自的相应模块,互相之间需要进行信息的交换。图10-5 多CPU系统的自动刷新原理假设系统的CPU1在B0~B1F之间设定了32点的自动刷新,CPU2在B20~B3F之间执行32点的自动刷新,如图10-6所示。图10-6 多CPU设置那么在CPU1的END处理期间,执行的处理过程为图10-5中的1.和4.,即:1)CPU1的B0~B1F传输软元件数据被传送到CPU1的自动刷新区(1.)。图10-7 多CPU系统FROM/TO指令图10-7表述的意思如下:1)用TO指令写入数据到PLC1的用户区(1.)。......
2025-09-29

图5-4-1 上端部转向导轨系统结构示意图图5-4-2 上端部转向导轨系统工作原理示意图梯级向下运行时 前进侧系统是松边,返回侧系统为张紧边。由于梯级主轮的轮毂外圆与驱动链轮的齿槽啮合后沿上部链轮轴旋转,随后进入前进侧主轮导轨水平直线段;副轮则由返回侧直线段副轮导轨进入转向壁上的转向导轨,随后进入前进侧副轮水平导轨。这样当主轮从驱动链轮过渡到水平直线导轨时能平稳地滚动,所以过渡平稳、冲击小、无噪声,链条张力变化小。......
2025-09-29
液压传动的工作原理可以用一个液压千斤顶的动作来说明。图1-1 液压千斤顶工作原理图1—杠杆手柄 2—小液压缸 3—小活塞 4、7—单向阀 5—吸油管 6、10—管道 8—大活塞 9—大液压缸 11—截止阀 12—油箱图1-1所示为液压千斤顶的工作原理图。通过对上面液压千斤顶工作过程的分析,可以了解液压传动的基本工作原理。液压传动是利用有压力的油液作为传递动力的工作介质。......
2025-09-29

PLC采用循环执行用户程序的方式,称为循环扫描工作方式,其运行模式下的扫描过程如图3-1所示。输出刷新阶段在执行完用户所有程序后,PLC将输出映像区中的内容送到寄存输出状态的输出锁存器中,这一过程称为输出刷新。PLC仅在扫描周期的起始时段读取外部输入状态,该时段相对较短,抗输入信号串入的干扰极为有利。图3-1所示工作过程是简化的过程,实际的PLC工作流程还要复杂些。......
2025-09-29
相关推荐