电磁场中有电路和磁路的概念,热场中也有热路的概念。从这点上讲,把热场简化为热路,其精度比电磁场简化电路和磁路的要低,但通过适当处理也可满足工程计算要求。图5-2 电路与类比的热路a)电路 b)热路表5-1 热路参数与电路参数的类比利用以上热路和电路相似原理可对一具体开关电器建立其热路网络模型,求解热网络问题可采用电网络方法求解,例如用电网络的软件PSpice来计算。另一种求解热网络方法是热网络有限差分法。......
2025-09-29
实验采用对称的双断口结构,图6-25所示为实验模型的平面图及相关几何尺寸,单位均为mm。其中虚线部分所示为灭弧室,每一个灭弧室的尺寸均为36×32×20,静导电杆的厚度为2.5,动、静导电杆的宽度均为5,动、静触头的大小分别为7×4×2和7×7×2。出气口的大小为3×3和6×6两种。
灭弧室采用不饱和聚酯模塑料(DMC)材料,动、静导电杆和动、静触头分别为铜和银氧化锡(Ag/SnO2),产气材料为POM。
图6-25 气动斥力实验模型的平面图
图6-26 气动斥力测试方法的原理图
测量方法的原理如图6-26所示。动导电杆通过螺钉固定在连接杆上的A点,实验时模型水平放置,初始时在一定的弹簧压力作用下,动静触头闭合,当短路电流到来后,在电动斥力FL和气动斥力FB的作用下,动触头开始运动,并带动连接杆在图6-25所示的导槽中滑动,连接杆的一端和电阻式位移传感器的测量杆相固定,以测量动导电杆的运动位移s随时间的变化过程,另一端通过弹簧和石英拉压传感器相连接,可测量弹簧作用在其上的力FK,两个连接端有一段距离l,这也是留给动导电杆的最大位移量。
这样,作用在动导电杆上力就包括FL、FB和弹簧力FK,且满足式(6-16)所示的关系式,其中m为连接杆、动导电杆等可动部分的质量。根据实验中测量到的s和FK,求解该方程,就可以得到FL和FB的合力值,也即F。此外,由于FK仅与弹簧的刚度系数和长度的变化量有关,因此力传感器并不是必须的。
图6-27为采用上述方法得到的一组电弧电流、电压和动导电杆位移的实验结果,弹簧的预压力为3N,电流峰值Im为5.3kA,电压峰值为76V,最大位移为2.1mm。但是,由于位移传感器的测试精度以及模型中机械摩擦等因素的影响,位移的测量结果明显滞后于电流和电压。除了以上原因之外,电弧的热惯性也可能造成该现象。
为了克服这种问题,实验也可以在固定的动静触头间距条件下,采用熔丝引弧的方法,通过直接测量燃弧期间作用在动导电杆上的FL和FB的合力来完成。此时,只要将连接杆的一端固定在力传感器的测量引出端即可。下面的实验均是采用该方法进行的。

图6-27 Im=5.3kA时的一组实验结果
实验同样采用频率为50Hz的大容量振荡回路提供短路电流,由于实验模型不具备开断较大短路电流的能力,在实验电路中串接一个低压塑壳断路器来开断电路,保证燃弧持续时间只有一个半波,以减小短路电流对于模型和触头系统的破坏。
在实验中,除了利用石英拉压传感器测量作用在动导电杆上的力F外,还通过分流器得到电弧电流,以及用高压探头测量电弧电压,最后用一台数字式存储示波器记录这些实验波形。
实验条件有以下三种:
1)在不同的预期短路电流(有效值为3~6kA),当出气口3×3时,针对5个不同的动、静触头间距s(=2、3、4、5、6mm)进行实验。
2)当s=2mm,出气口为3×3时,在灭弧室中两个触头区域均加入19mm×12mm的POM产气材料进行实验。(https://www.chuimin.cn)
3)当s=2mm时,没有产气材料,仅改变出气口大小为6×6。
根据以上的分析,由于实验中测得的力F为作用在动导电杆上的电动斥力FL和气动斥力FB的合力,为了得到气动斥力随时间的变化过程,就需要从合力中减掉电动斥力。
从6.3节可以看出,采用有限元方法可以对电动斥力进行较为准确的计算。为了便于分析,对电弧进行简化处理,认为电弧是连接动静触头的一段导体,然后利用ANSYS有限元分析软件,对图6-25所示的实验模型中的电动斥力进行了计算。
图6-28所示为当动、静触头的间距s=5mm,电流为4kA时1/4模型的电流密度分布。
图6-28 导电回路的电流密度分布
表6-6为电流等于4kA、不同触头间距s时的电动斥力的计算结果。由于模型中不存在非线性铁磁物质,这样同一间距时电动斥力和电流的平方成正比例关系。计算结果也说明了这一关系,s=2mm,电流为6kA时,电动斥力的计算结果为9.32N,与4kA时相比,电流的平方比值为62/42=2.25,而力的比值为9.32/4.14=2.251。因此,根据表6-6的数据以及电动斥力与电流之间的关系,就可得到这些间距时任意电流作用下的电动斥力数值,从而求得作用在动导电杆上的气动斥力数值。
表6-6 电流为4kA时的电动斥力的计算结果

图6-29a所示为触头间距s=2mm,预期短路电流有效值为5kA,实际短路电流峰值Im=4.2kA时的实验结果,其中F、u和i分别为作用在动导电杆上的力、电弧电压和电流;图6-29b为F达到峰值之前,F、气动斥力FB、电动斥力FL随时间的变化曲线。其中FL曲线是基于表6-6的关于电动斥力的计算结果,根据电动斥力与电流的平方成正比例关系得到的。FB曲线是测量得到的合力F和FL的差值。应该指出的是,由于电弧电压的作用,使得实际的短路电流总是小于其预期值。
从图中可以看出,由于在实验电路中串接了一个用于开断电路的塑壳断路器,电弧电流只有一个半波。在起弧的时候,电弧电压有一个初始值U0,随着电流的上升,电弧电压的数值也有一定的提高。在本实验条件下,U0的变化范围为30~50V。
而测得的作用在动导电杆上的力同样在起弧时有一个初始值,开始时随着电流的上升而增大,但是很快达到峰值(在本实验的所有结果中,力峰值均在电流峰值之前)。此后,随着作用在动导电杆上斥力的减小,连接杆和保持固定触头间距部分的变形,以及传感器应变片开始恢复反弹,使得作用在传感器上的力有一个反方向的冲击。
本实验目的是分析气动斥力的作用特性,以及各种因素对气动斥力的影响规律。这样,根据实验结果,以下仅对作用在动导电杆上的力达到峰值之前的过程进行分析,并由此对峰值以后的气动斥力作用进行推算。应该指出的是,以上的实验方法分析也提到,测量动导电杆的位移可从动态的角度来分析气动斥力。
此外,需要说明的是,为了更好地对实验结果进行分析,认识气动斥力的特性,以下所有的FB/(ui)随时间的变化曲线都是对根据实验得到的数据曲线采用FFT方法进行平滑处理的结果。
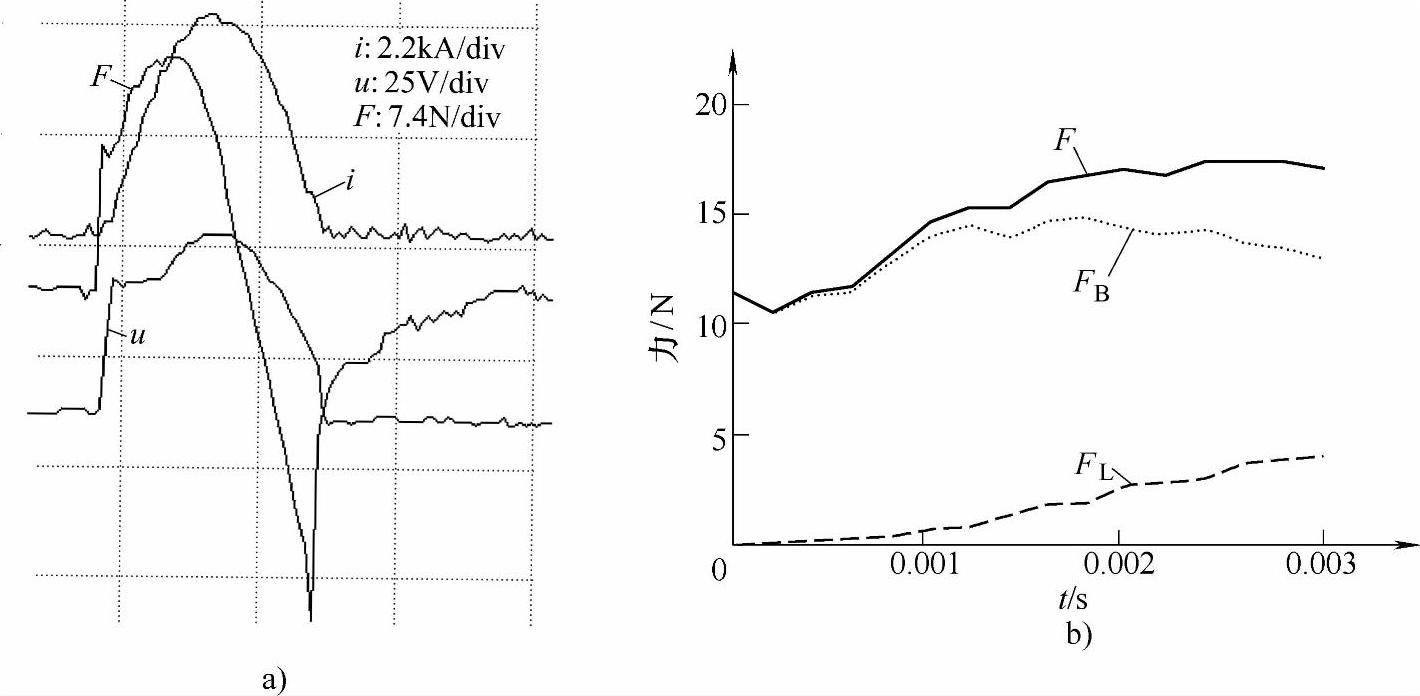
图6-29 s=2mm,Im=4.2kA时的实验波形及电动斥力、气动斥力随时间的变化曲线
a)力、电弧电流和电压的实验波形图 b)合力、电动斥力、气动斥力随时间的变化曲线
相关文章

电磁场中有电路和磁路的概念,热场中也有热路的概念。从这点上讲,把热场简化为热路,其精度比电磁场简化电路和磁路的要低,但通过适当处理也可满足工程计算要求。图5-2 电路与类比的热路a)电路 b)热路表5-1 热路参数与电路参数的类比利用以上热路和电路相似原理可对一具体开关电器建立其热路网络模型,求解热网络问题可采用电网络方法求解,例如用电网络的软件PSpice来计算。另一种求解热网络方法是热网络有限差分法。......
2025-09-29

钛及钛合金焊前,将待焊处及其周围必须仔细进行清理,去除油、污、锈、垢并保持干燥。表面氧化皮清理完后,应该立即进行酸洗,以确保无氧化和油脂污染。......
2025-09-29

图5.14SIR模型(上)和SEIR模型(下)各仓室人群流动图每个感染者都具有传染力,当他们与易感人群接触时,就有可能将疾病传染给易感者,接触率与总人口数成正比。通过起始值、时间值等参数设置,根据SIR模型的假设和反映移动规律的微分方程,可以模拟出在一段时间内各个仓室人群的人口变化规律。计算伪代码如算法5.1所示:算法5.1SIR模型......
2025-09-29

另外,随机森林法可以评价各种指标的重要程度。装袋算法通过自助抽样法有效地提高了随机森林算法的准确度。Breiman在1984年提出的分类回归树是一种不稳定的学习算法,因此CART方法与装袋算法结合就形成了随机森林算法,可以提高模型预测准确率。随机森林模型中某一特征的重要性,是所有决策树得到的该特征重要性的平均值。......
2025-09-29

,xm}是一组称为项的元素的集合,集合XI称为项集。关联规则是一个表达式X→Y,其中X和Y是项集且不相交,即X,YI,其中N∩Y=。为了生成频繁且高置信度的关联规则,首先要枚举所有的频繁项及其支持度。给定数据集D和用户自定义的支持度阈值minsup;其次,给定频繁项集的集合F和最小置信度minconf,关联规则挖掘的任务是找出所有频繁且置信度高的规则。......
2025-09-29
建立操作机构仿真模型的最简便的方法是从常用的三维实体造型软件中导入,如从SolidWorks、UG和Pro/E等建立的实体模型完整地导入到ADAMS软件,中间文件格式最好的是Parasolid,以*.x_t和*.xmt_txt文件名导入,断路器操作机构的结构比较复杂。考虑到所关心的问题和仿真的方便,对其作适当简化,将从UG等三维软件导入的低压塑壳断路器操作机构和触头系统的模型进行了删减,在ADAMS/View中重新建立了关键构件的模型,其主要由连杆机构组成。......
2025-09-29

质量运输空化模型采用不同的凝结项经验系数Ccond和蒸发项经验系数Cvapo控制质量和动量的交换。如图2.5所示,基于Zwart-Gerber-Belamri空化模型的离心泵空化流动数值计算结果与试验结果相差较大。为分析凝结项经验系数对泵空化流动数值计算的影响,在质量输运空化模型中默认值Ccond=0.01的基础上,凝结项经验系数分别取为0.001、0.000 1、0.000 01、0.000 001、0.000 000 1,对离心泵的两种工况Q=19.80 m3/h和Q=25.33 m3/h下的空化流动进行定常数值计算。继续降低Ccond至0.000 1时,扬程曲线变化较明显。......
2025-09-29

电流密度J的分布情况通过求解公式(6-1)来获得。在本节中,动静导电杆的材料采用铜,动静触头的材料采用银,电弧的电导率为银的10-4。在ANSYS有限元软件中进行静态传导电流分析,需要经过单元类型选择、定义材质属性、分配材质属性、几何模型剖分、定义边界条件、加载激励和结果处理这几个步骤。将上一步所得电流密度分布情况作为激励加载至模型上,通过有限元分析计算,可以得到灭弧室内的空间磁场分布。......
2025-09-29
相关推荐