固定鸭舵式执行机构如图2 -13 所示。磁力矩电机由安装在引信体内的内转子线圈绕组和安装在舵部件内表面的外转子永磁体构成。由于在内转子线圈绕组中产生了电流, 因而会产生反电磁力矩, 该力矩与弹丸飞行过程中由旋转舵面产生的气动力矩相反。通过改变可调负载阻值, 可调节反电磁力矩。但在对弹丸的修正控制过程中, 必须保证弹丸依靠自身稳定性能稳定飞行。......
2025-09-29
如何提高断路器的开断速度是低压断路器研究的一个重点,这里采用优化和改进操作机构来达到这个目的,优化分析的具体方法与前述塑壳断路器相同。影响动触头打开速度的因素有三个方面:
1)开断弹簧的刚度系数,它对于速度的影响最明显;
2)以Oa为参考点,轴A、B、C、D、E的位置对速度的影响;
3)在轴的位置确定后,杆件的形状发生变化时,即杆件的质量和质心发生变化时对速度的影响。
因此,通过以上三个方面的分析,分析了各种参数对开断速度变化的影响。
(1)开断弹簧刚度系数对开断速度的影响
增大开断弹簧的刚度系数可以提高开断速度。图2-49为不同刚度系数下的动触头的速度。
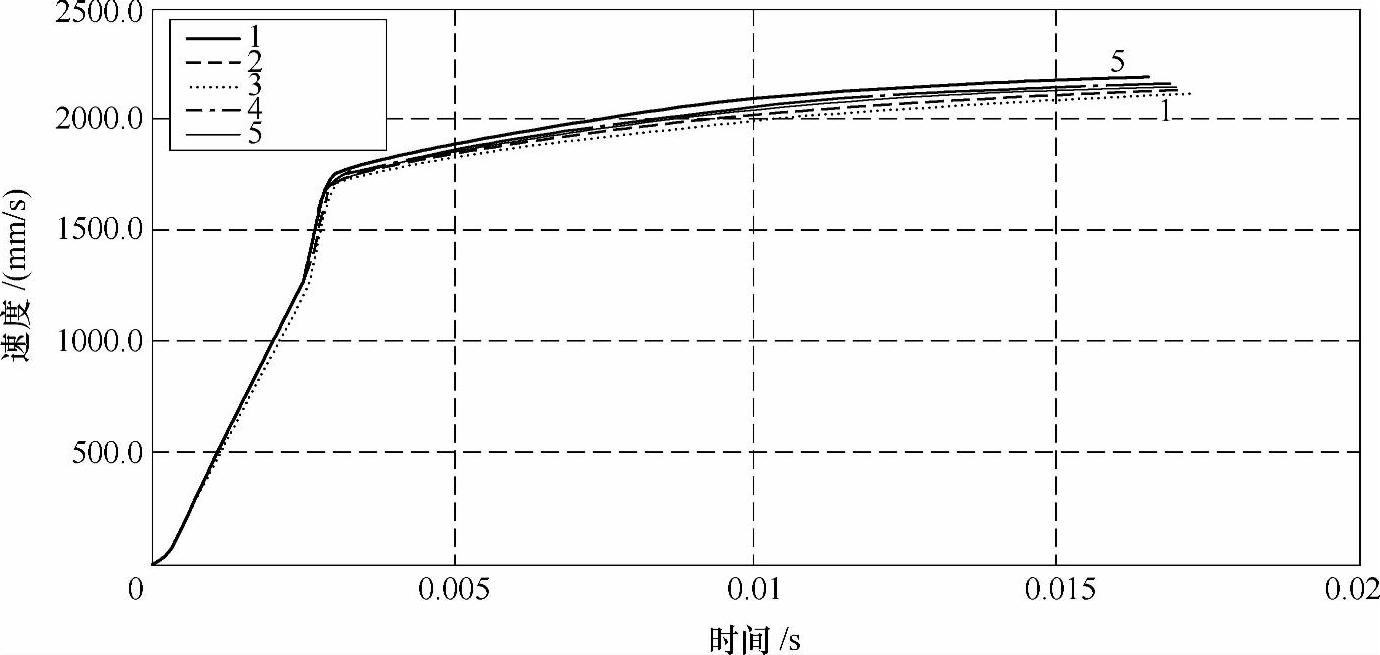
图2-49 不同刚度系数下的动触头速度比较
(从下到上5条曲线分别对应弹簧刚度系数为3、4、5、6、7N/mm)
图中,从曲线1到曲线5,分别为在3N/mm、4N/mm、5N/mm、6N/mm、7N/mm的刚度系数情况下的仿真曲线,从图中可以看出,从曲线1到曲线5,动触头速度依次增大。增大刚度系数可以达到目的,但增量不是很大,从图中可以看出在3ms之前五条曲线几乎是重合的(因为刚开始动作的时候是反力弹簧作用力为主),之后才慢慢区分开,可以看出开断速度的增量和刚度的增量是完全不成比例的,而且分断弹簧刚度的增加必然要使得断路器合闸力增加,造成合闸困难,因此增加刚度系数并不是一个很好的选择。
(2)各个轴的位置对开断速度的影响
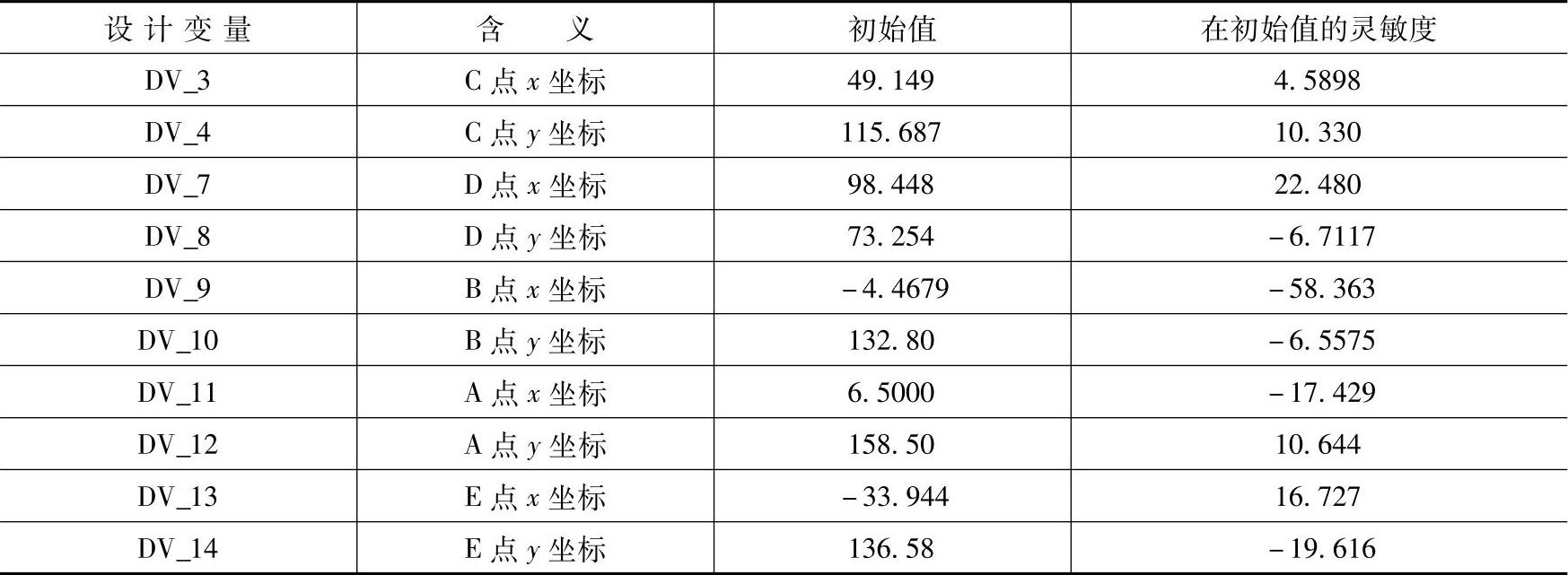
这部分工作通过ADAMS软件提供的设计研究来进行。这里以轴A、B、C、D、E(见图2-45)的x,y坐标为单独的设计变量进行设计研究。以下为以A、B、C、D、E5个轴的x、y坐标值为10个设计变量,使它们的值有相同的变化范围,都是在±1.5(mm),以相同步骤的设计研究,观察每个变量对平均角速度的影响。表2-12为轴的位置设计研究结果。
根据表2-12,可以知道哪些设计变量对角速度有较大的影响。从表中可以看出,变量DV_7、DV_9、DV_11、DV_13、DV_14的敏感度较大,即轴E的y轴坐标、轴A、B、D、E的x轴坐标对动触头的开断角速度有较大的影响。根据这个结论,可以进一步对这几个变量进行调整,进行优化分析以获得进一步的优化设计结果。(https://www.chuimin.cn)
表2-12 轴的位置设计研究结果表
优化分析是ADAMS软件提供的一种复杂的高级分析工具。通常,优化分析问题可以归结为:满足各种设计条件和在指定的变量变化范围内,通过自动地选择设计变量,由分析程序求取目标函数的最大或最小值。由此,对DW45操作机构进行分析,以敏感度较大的5个变量为基础,进行机构的优化。目标函数是使动触头平均角速度最大。表2-13是优化分析结果。
表2-13 考虑轴的位置后的优化结果

从表2-13中看出,经过5个变量同时变化的优化分析,使得动触头平均角速度从1355.82deg/s提高到1446.04deg/s,同时动触头的刚分速度从1.68m/s提高到2.11m/s。
(3)杆件的质量和质心对开断速度的影响
以图2-45中的杆件主轴悬臂、连杆1、连杆2和顶杆的质量和质心坐标为设计变量,进行如2.6.3节所介绍的设计研究。各杆件质心的x、y坐标值在[原始值±1(mm)]区间内五等分,质量在[原始值±10(g)]区间内五等分,研究它们对动触头开断角速度的影响。表2-14为杆件质心对角速度影响的设计研究结果,表2-15为杆件质量对角速度影响的设计研究结果。
表2-14 杆件质心对角速度影响的设计研究

表2-15 杆件质量对角速度影响的设计研究

从表2-14、表2-15中可以看出:1)主轴悬臂的质心对动触头角速度影响最大,在图2-45中应使其x坐标向右移动,y坐标向下移动,这可以通过改变零件的形状来获得;2)连杆1的质心影响也较大,可以在图2-45中应使其质心向左上方移动;3)连杆2的质心y坐标影响较大,应使其向下移动;4)顶杆的质心影响较小;5)它们的质量越大,角速度越小,所以应该减小质量。
相关文章

固定鸭舵式执行机构如图2 -13 所示。磁力矩电机由安装在引信体内的内转子线圈绕组和安装在舵部件内表面的外转子永磁体构成。由于在内转子线圈绕组中产生了电流, 因而会产生反电磁力矩, 该力矩与弹丸飞行过程中由旋转舵面产生的气动力矩相反。通过改变可调负载阻值, 可调节反电磁力矩。但在对弹丸的修正控制过程中, 必须保证弹丸依靠自身稳定性能稳定飞行。......
2025-09-29

以图2-31中的触头主轴O1为参考点,操作机构关键轴A、B、C,O2的中心X,Y坐标为设计变量,进行设计研究。这一结论为进一步优化设计奠定了基础。以触头主轴的平均角速度最大为目标函数,设计变量在指定的范围内变化。在优化过程中,ADAMS自动调整设计变量,以获得最佳目标函数值。表2-7为考虑DV_1、DV_3、DV_6、DV_74个变量时机构的优化分析结果。以上分析结果可以作为设计五连杆型的塑壳断路器操作机构时的参考。......
2025-09-29

建立操作机构仿真模型的最简便的方法是从常用的三维实体造型软件中导入,如从SolidWorks、UG和Pro/E等建立的实体模型完整地导入到ADAMS软件,中间文件格式最好的是Parasolid,以*.x_t和*.xmt_txt文件名导入,断路器操作机构的结构比较复杂。考虑到所关心的问题和仿真的方便,对其作适当简化,将从UG等三维软件导入的低压塑壳断路器操作机构和触头系统的模型进行了删减,在ADAMS/View中重新建立了关键构件的模型,其主要由连杆机构组成。......
2025-09-29

针对某型固定鸭舵式二维弹道修正智能榴弹, 对固定鸭舵的制动控制是弹道修正的关键技术。结合固定鸭舵的受力和运动特性, 从上述两种控制方案中进行优选。其次, 从固定鸭舵的控制对磁力矩电机提出的要求角度考虑。固定鸭舵滚转一周的时间约为0.033 s, 在如此短的时间内实现多次无偏差速度控制, 对磁力矩电机的响应速度提出了很高的要求, 且由于固定鸭舵飞行环境干扰的复杂性, 控制的精度很难保证。......
2025-09-29

在特殊情况下,在不断气、断电的情况下进行可达性差的结构焊接时,应向上级主管安全部门申请,经他们研究批准后方可施工。6)水下可达性差的结构焊接时,必须严格遵守《水下焊接与切割中的安全技术》标准及有关潜水规定。4)可达性差的结构焊接时,要对焊接现场尽量实行隔离。......
2025-09-29

可用于智能迫击炮弹的执行机构主要包括以下几种: 阻力器、脉冲推冲器、固定鸭舵、舵机。图3-21以脉冲推冲器作为执行机构的制导迫击炮弹3.固定鸭舵固定鸭舵方案是美军在开展二维弹道修正引信研制过程中发明的一种方案, 最早应用于155 mm 榴弹二维弹道修正引信中。......
2025-09-29

一般采用F级绝缘、IP54外壳保护等级。各品牌对公共交通型自动扶梯的动力配置不尽相同,但一般以80%左右的制动载荷作为额定载荷计算电动机功率,通常比普通自动扶梯高20%以上。减速箱 普通自动扶梯多采用造价较低的单级蜗轮蜗杆减速箱。常采用的有全齿轮减速箱、一级齿轮一级蜗轮的减速箱。减速箱的工作寿命设计应不小于140000h。梯级链条的安全系数应不小于5。一般要求在制动载荷条件下,销轴比压不大于25N/mm2。......
2025-09-29

图5.5叶轮中间截面上叶片载荷分布由图5.5可知,NPSHa=2.09m[对应图5.1中的A点]时,叶轮叶片表面压力分布较均匀,在叶片进口吸力面处压力最小,出口处压力最大。NPSHa=1.27m[对应图5.1中的C点]时,叶片表面压力分布发生变化,即叶片载荷在S=0~0.3处明显变小。当NPSHa=1.07m[对应图5.1中的D点]时,叶片表面压力分布变化较显著,即叶片载荷在S=0~0.6处变得较小,尤其是在S=0.4~0.6处接近零,叶片前端60%的部分基本不做功,造成离心泵扬程突降。......
2025-09-29
相关推荐